基于蹼式折纸的两指刚性抓捕机械手
本发明涉及宇航空间抓捕,具体涉及一种基于蹼式折纸的两指刚性抓捕机械手。
背景技术:
1、近些年随着航空航天事业的发展,空间技术竞争日益激烈,各国也相继发射了不少航天器进入太空轨道执行任务。但由于太空中可利用的空间有限,故过多的航天器势必会导致一系列的问题产生,比如一些燃料用尽的航天器得不到很好的维修处理从而变成太空垃圾,使得有利的空间轨道被废弃的航天器所占用;同时对于非合作目标的卫星捕获也依赖于空间捕获技术,所以失效的航天器的捕获回收技术逐渐成为了一项重要热点问题。目前现阶段采用空间机械臂对非合作卫星及太空垃圾进行的捕获普遍存在系统机构复杂、发射体积较大、对多机械臂协调控制难度大等问题,对于抓取非合作目标更是难以实现。因此要求空间抓捕机器人拥有结构简单、发射体积小、驱动简单易于控制、可靠性强等优点。所以基于上述问题,有必要提出一种基于蹼式折纸的两指刚性抓捕机械手。
2、如公开号为cn110979756b的文献中,公开了一种空间可展开抓捕机械手装置,包括基座和多个机械手爪,机械手爪包括多个依次相连的折展单元,折展单元包括支座、侧翻式剪叉机构与驱动机构,支座包括基板、活动板,活动板与基板之间能够产生相对滑动,侧翻式剪叉机构包括两个相同的剪叉臂,两个剪叉臂之间通过偏置的一铰接点转动连接;驱动机构为其中一个支座中的活动板提供动力源,使其相对基板产生位移,以使得另一支座中产生侧向往复翻转。
3、上述文献中存在驱动元件过多、驱动较为复杂、不适合在太空工况下工作等问题。因此,有必要研究一种基于蹼式折纸的两指刚性抓捕机械手。
技术实现思路
1、针对现有技术存在的问题,本发明提供一种基于蹼式折纸的两指刚性抓捕机械手,将折纸理论与机构运动副匹配相结合,依据v-miura折痕横向可折展的特点,实现该机械手的横向可折展,利用waterbomb折痕可弯曲抓捕的特点,使机械手获得弯曲抓捕的能力,通过驱动v-miura桁架支撑机构展开进而使得waterbomb桁架机构展开并进行包络抓取。该机械手使其在发射时占据较小的空间,降低了对运输包络空间的需求,还可实现空间在轨大口径抓捕,用于空间非合作目标捕获。
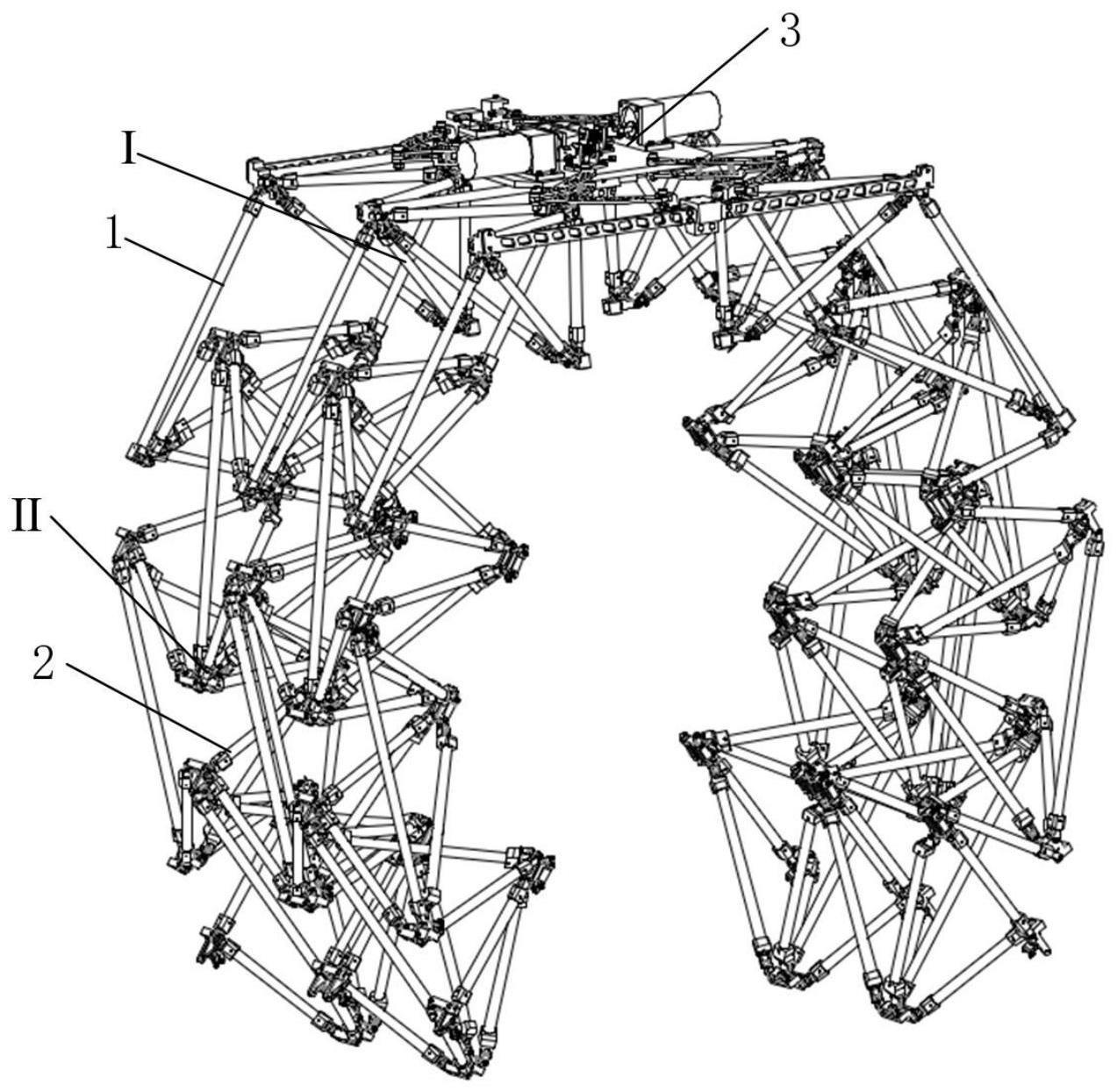
2、本发明提供了一种基于蹼式折纸的两指刚性抓捕机械手,其包括第一支撑组件、指段组件和驱动组件;所述指段组件设置在所述第一支撑组件的下方,所述第一支撑组件和指段组件对称设置在所述驱动组件的两侧;所述第一支撑组件包括四个v-miura桁架支撑机构、外展拓扑接头以及端部拓扑接头,相邻的两个所述v-miura桁架支撑机构通过所述端部拓扑接头连接,所述指段组件包括十二个waterbomb桁架机构以及顶端拓扑接头,相邻的两个所述waterbomb桁架机构通过所述顶端拓扑接头连接,所述v-miura桁架支撑机构包括驱动杆、外展杆、上交叉杆、斜支撑杆、外展接头、主动中杆、从动中杆、端部五轴接头、第一y形接头、下交叉杆、第二y形接头和端部接头,所述驱动杆、外展杆、上交叉杆和斜支撑杆的第一端通过所述外展接头连接,所述上交叉杆的第二端分别与所述主动中杆和从动中杆的第一端通过所述端部五轴接头连接,所述主动中杆与所述斜支撑杆的第二端通过所述第一y形接头连接,所述从动中杆的第二端与所述下交叉杆的第一端通过所述第二y形接头连接,所述下交叉杆的第二端与所述外展杆的第二端通过所述端部接头连接;所述waterbomb桁架机构包括指段驱动杆、顶端接头、第一从动杆、第二从动杆、中杆、中部接头和尖端六轴接头,所述指段驱动杆的两端均通过所述顶端接头与所述第一从动杆和第二从动杆的第一端连接,所述第一从动杆的第二端与所述中杆的第一端通过所述中部接头连接,所述中杆的第二端与所述第二从动杆的第二端通过所述尖端六轴接头连接;所述驱动模块包括固定板、第一电机、第二电机、支撑大臂、支撑小臂、支架、支撑板、定滑轮、第一绳索、第二绳索和卷绳盘,所述支撑大臂对称设置在所述固定板的两侧,且所述支撑大臂的第一端与所述固定板转动连接,所述支撑小臂的第一端与所述支撑大臂的第二端通过销柱转动连接,所述支撑小臂对称设置在所述支架的两侧,所述支架与所述支撑小臂的第二端转动连接,所述支撑板的中间位置与所述支架固定连接,所述支撑板的两端与所述第一支撑组件的外展接头连接,所述定滑轮设置在所述支架的一侧,所述第一绳索的第一端与所述支架连接,所述第二绳索的第一端绕过所述定滑轮与所述支架连接,所述第一绳索和第二绳索的第二端均缠绕在所述卷绳盘上,所述卷绳盘通过联轴器与所述第一电机和第二电机的输出轴连接。
3、可优选的是,所述上交叉杆、斜支撑杆和外展杆的第一端借助于所述外展拓扑接头将与相邻所述v-miura桁架支撑机构的驱动杆、上交叉杆和斜支撑杆的第一端连接,所述下交叉杆和外展杆的第二端借助于所述端部拓扑接头与相邻所述v-miura桁架支撑机构的下交叉杆的第二端连接。
4、可优选的是,所述指段驱动杆、第一从动杆和第二从动杆的第一端借助于所述顶端拓扑接头与相邻所述waterbomb桁架机构的第一从动杆和第二从动杆的第一端连接。
5、可优选的是,所述外展接头、第一y形接头、第二y形接头、端部接头、外展拓扑接头和端部拓扑接头均采用十字轴连接,十字轴的两转轴间不相交且具有一定距离,并具有两个旋转自由度。
6、可优选的是,所述相邻两个waterbomb桁架机构的指段驱动杆在同一水平面运动。
7、可优选的是,所述第一电机和第二电机分别设置在所述固定板的对角位置。
8、可优选的是,所述外展杆分别与所述端部接头和端部拓扑接头之间进行单自由度旋转;所述从动中杆和主动中杆分别与所述端部五轴接头、第一y形接头和第二y形接头之间进行单自由度旋转。
9、可优选的是,左右手指均由三个所述waterbomb桁架机构构成,每节桁架机构由两个所述waterbomb桁架机构构成双层对称结构。
10、可优选的是,所述中杆与连接的接头之间具有一个旋转自由度,所述第一从动杆和第二从动杆与连接的接头之间均具有两个旋转自由度。
11、可优选的是,所述v-miura桁架支撑机构和waterbomb桁架机构之间通过所述端部接头、端部拓扑接头和第二y形接头连接。
12、本发明的特点和有益效果是:
13、1.本发明基于蹼式折纸的两指刚性抓捕机械手,从折纸理论中的v-miura及waterbomb折痕出发,设计了新的空间抓捕结构,依据v-miura折痕横向可折展的特点,实现该机械手的横向可折展,利用waterbomb折痕可弯曲抓捕的特点,使机械手获得弯曲抓捕的能力,通过驱动v-miura桁架支撑机构展开进而使得waterbomb桁架机构展开并进行包络抓取,减小了抓捕机构的收拢体积。
14、2.本发明基于蹼式折纸的两指刚性抓捕机械手,v-miura桁架支撑机构与waterbomb桁架机构均采用杆件与接头配合的连接方式,在折叠过程中实现指段的弯曲抓捕,可通过横向拓扑waterbomb桁架机构的数量,实现多指节弯曲,进而实现不同大小物体的抓取。
15、3.本发明基于蹼式折纸的两指刚性抓捕机械手,采用两个电机通过绳驱的驱动方式调节驱动杆间的距离,实现该机械手的抓取和放开,不仅使该机械手工作简单、可靠性高,还减轻了整体的总质量。
- 还没有人留言评论。精彩留言会获得点赞!