一种高续航高负载无人飞行器的制作方法
本发明涉及无人飞行器,具体涉及一种高续航高负载无人飞行器。
背景技术:
1、无人飞行器又称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,在航拍、农业、植保、微型自拍、快递运输、灾难救援、测绘、新闻报道、电力巡检、救灾、影视拍摄等领域应用广泛。
2、现有的无人飞行器大多以电力驱动桨叶转动实现飞行,其动力来源于无人飞行器自身携带的电池,如中国专利cn206031745u、cn203601572u就公开了这类无人飞行器,但受限于电池比容量,这类无人飞行器的续航力与负载力负相关,难以实现续航力与负载力的兼顾。
3、为解决这一问题,市场上出现了通过石化燃料、太阳能、风能等能源对电池进行随行充电的无人飞行器;如中国专利cn105539828a、cn109319155a就公开了采用汽、柴油内燃机进行随行充电的无人飞行器,但这类随行充电涉及化学能、热能、动能的转化,能源转化效率有限(50%以下),能量浪费较大,同时,这类飞行器的负载与燃料装载量相关性大,难以实现续航力与负载力的兼顾,在飞行过程中,随着燃料消耗,无人飞行器的重心存在一定的变化,需要飞控系统进行额外的平衡操作,虽然燃料消耗会带来负载力的提升,但由于处在飞行过程中,这部分提升的负载力却难以获得使用,负载力的利用效率不高;又如中国专利cn109873482a、cn104608914b就公开了采用太阳能、风能进行随行充电的无人飞行器,但这类随行充电受天候、日照、风向等因素的影响较大,难以实现较高的稳定性和持续性,实际使用效果不佳。
技术实现思路
1、本发明的主要目的是为了克服现有技术中的一个或多个缺陷,提供一种高续航高负载无人飞行器。
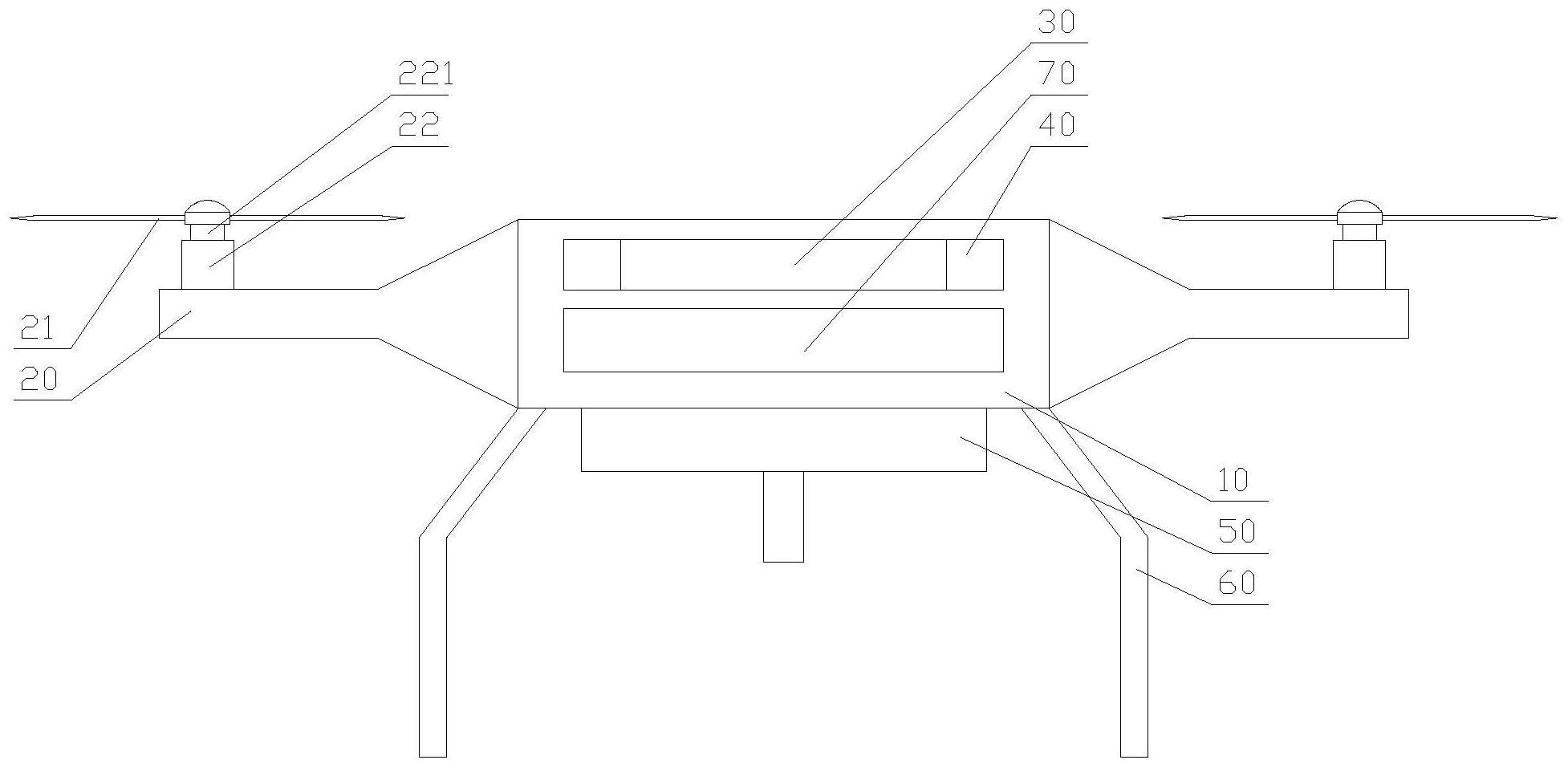
2、为达到上述目的,本发明提供的技术方案是,机体;
3、机翼,所述机翼设置在所述机体的四周并向外水平伸出,所述机翼的端部设有可转动的桨叶和用于驱动所述桨叶转动的电动机;
4、电池组,所述电池组设置在所述机体内,所述电池组包括第一电池和第二电池,所述第一电池用于向所述电动机供电;
5、控制模块,所述控制模块设置在所述机体内,所述控制模块用于控制所述电动机的转速及转向;
6、负载单元,所述负载单元连接在所述机体的底部中心;
7、支撑脚,所述支撑脚连接在所述机体底部,所述支撑脚有多个并围绕所述负载单元均布;
8、随行供电单元,所述随行供电单元用于向所述电池组充电,所述随行供电单元还用于满足显示、通讯等其他用电需求,所述随行供电单元包括发电机、变频器、变压器;
9、所述高续航高负载无人飞行器还包括磁力引擎,所述磁力引擎产生的动力包括第一动力和第二动力,所述第一动力用于带动所述桨叶转动,所述第二动力用于带动所述发电机发电;
10、所述磁力引擎包括无磁性缸体、可上下移动地设置在所述缸体内的磁性活塞、固定设置在所述缸体上方的驱动磁体、可移动且能够阻隔磁力线的导磁板、以及驱动机构;
11、所述磁性活塞通过连杆与端部连接有惯性飞轮的曲轴转动连接,所述曲轴用于输出所述第一动力和所述第二动力,所述曲轴与所述发电机的转子同轴连接,所述曲轴还通过传动机构及离合机构与所述桨叶的转动轴相连接,所述驱动磁体与所述磁性活塞均为强磁铁且相向侧的磁极相同,所述驱动磁体与所述磁性活塞在上下方向上的投影相重合,所述导磁板具有移入所述驱动磁体与所述缸体之间的第一工作位置和从所述驱动磁体与所述缸体之间移出的第二工作位置,在所述导磁板处于第一工作位置时,所述磁性活塞与所述驱动磁体之间90%以上的磁力线被所述导磁板阻隔,所述磁性活塞与所述驱动磁体之间的相斥力远小于所述惯性飞轮施加在所述磁性活塞上的驱动力,使所述磁性活塞能够在所述惯性飞轮的带动下向上移动,在所述导磁板处于第二工作位置时,所述磁性活塞与所述驱动磁体之间的相斥力远大于所述惯性飞轮施加在所述磁性活塞上的驱动力,使所述磁性活塞能够在所述相斥力的作用下向下移动,所述驱动机构用于驱动所述导磁板在所述第一工作位置和所述第二工作位置之间往复变换,所述第二电池用于提供所述驱动机构所需的动力。
12、所述驱动机构的电源初期来自所述第二电池供应,当所述驱动机构带动所述导磁板动作时,所述磁性活塞便已经开始上下往复运动,所以后期所述驱动机构所需要的电源将来自所述发电机所提供电源。以小电力来驱动所述导磁板运作,使得产生的动能远大于驱动电能,使所述磁力引擎可以连续运作较长时间。
13、优选地,所述导磁板包括磁性中间层、设置在所述磁性中间层上下表面的磁极群、以及用于将所述磁极群包裹在所述磁性中间层上下表面的无磁性外壳,所述磁性中间层的磁极与所述磁性活塞和所述驱动磁体相向侧的磁极相异或具有可被磁性吸附的材料,所述磁性中间层由依比例分布在同一平面的复数个n极和复数个s极磁铁构成,所述磁性中间层所述磁性活塞和所述驱动磁体相向侧有异性极性吸引作用,同时有部分极性相同相斥作用以降低导磁板移动所消耗的能耗。
14、进一步优选地,所述磁极群由复数个n极与s极的磁铁依比例配置而成。
15、优选地,所述电池组具有放电正极、放电负极、充电正极、充电负极,所述电动机、所述控制模块串联在所述放电正极与所述放电负极之间,所述发电机、所述变频器、所述变压器串联在所述充电正极和所述充电负极之间。
16、进一步优选地,所述充电负极和所述放电负极为同一极。
17、优选地,所述驱动机构包括驱动器和驱动电源,所述驱动器包括驱动气缸和驱动电机,所述驱动电源用于提供所述驱动器动作所需的动力。
18、进一步优选地,所述随行供电单元还用于向所述驱动电源充电。
19、优选地,所述负载单元包括音、视频传感器。
20、优选地,所述电动机设置在所述机翼端部的上方,所述电动机的输出轴向上伸出与所述桨叶的中心相连接。
21、优选地,所述支撑脚的上端部向外向下倾斜延伸,下端部向下竖直延伸,在所述负载单元的四周形成八字形支撑。
22、由于上述技术方案的运用,本发明与现有技术相比具有下列优点:
23、本发明提供的高续航高负载无人飞行器,包括机体、设有桨叶和电动机的机翼、用于向电动机供电的电池组、用于控制电动机转速及转向的控制模块、连接在机体底部中心的负载单元、连接在机体底部并围绕负载单元均布的支撑脚、用于向电池组充电的随行供电单元,通过使随行供电单元包括发电机、变频器、变压器及磁力引擎,使磁力引擎包括无磁性缸体、可上下移动地设置在缸体内的磁性活塞、固定设置在缸体上方的驱动磁体、可移动且能够阻隔磁力线的导磁板、以及驱动机构,使磁性活塞通过连杆与端部连接有惯性飞轮的曲轴转动连接,使曲轴与发电机的转子同轴连接,使驱动磁体与磁性活塞均为强磁铁且相向侧的磁极相同,使驱动磁体与磁性活塞在上下方向上的投影相重合,能够通过导磁板在磁性活塞与驱动磁体之间的移入移出控制相斥力的形成与否,再配合惯性飞轮即可驱动磁性活塞上下移动,从而带动发电机发电,在同等续航下,能够大幅降低电池组自重以提升负载力,磁能直接转变为动能的随行充电方式,转化效率高,不涉及燃料装载及消耗,飞行过程中无人飞行器的自重重心基本不变,飞控系统简单稳定,对负载力的利用效率高,随行充电不受外界环境影响,能够实现较高的稳定性和持续性,实际使用效果好。
- 还没有人留言评论。精彩留言会获得点赞!