一种多功能太空软体机器人的制作方法
本发明涉及机器人,特别涉及一种多功能太空软体机器人。
背景技术:
1、随着航天技术的发展,越来越多宇航员进入太空开展各类研究。但是太空环境极其恶劣,充满了许多的不确定因素,如外太空具有超高真空、极端温度、高能辐射、高能粒子、微重力、紫外线等问题,以及不计其数的太空碎片,稍有不慎就有可能漂离太空船,甚至失去生命。所以如果能够用太空机器人代替宇航员进行舱外的活动,就可以大大降低宇航员的生命危险及操作成本,更能有效地帮助人类扩展活动和操控范围。然而大部分机器人无法很好的适应太空的恶劣操作环境,因此,亟需开发研制出新型的机器人,以适应复杂恶劣的太空环境,以及减少生产制造及运输的成本。
2、传统的刚性机器人不仅操作复杂而且体积庞大,将其顺利运送到外太空将会是一笔很大的费用,而且一旦机器人出现故障将会产生新的太空垃圾,甚至威胁到舱外宇航员的生命。而软体机器人则不同,软体机器人通常由软材料制造,具有发射成本低、适应性强等功能,此外,为了节省运输的成本,可以将软体机器人进行在轨制造或就地制造,如采用fdm打印制造、直接墨水写入制造、喷墨打印制造,以及立体光刻制造等等,就地制造就地使用。
3、对比文件cn107263495a公开了一种太空垃圾清理智能机器人系统,该机器人包括船舱,与船舱连接的视频及激光测量系统,用于捕获测量太空垃圾的信息;与船舱连接的抓取装置用于抓取大中型及小型太空垃圾,并且具有空气炮、激光炮等装置,用于改善太空的环境。但是,该发明仅仅提供了一种理想型的方案,究竟是否具备可行还未可知,且方案中所述的空气炮设备完全不具备可行性,利用空气炮对大型垃圾进行炮击后势必会产生数以亿计的小型垃圾,反而会对太空造成毁灭性的打击,完全不可行;其次,根据提供的方案,该机器人系统的体积势必会很庞大,运输到太空时必然会产生不小的生产运输的成本。综上可知,该方案的可行性比较低。
4、对比文件cn116812178a公开了一种高适应性的太空目标捕获装置,包括卫星基础平台,用于抓取目标外表面的外壁锁紧机构以及一对捕获目标上的喷管进行固定的机构,对于有尾喷管的目标物可通过喷管外轮廓的锁紧机构固定目标,对于体积较大的目标物,可利用旋转实现抓捕。该方案进行太空垃圾的抓取时具备一定的可行性,能够抓取卫星附近的垃圾。但是,该抓取机构采用刚性结构制造,在进行太空垃圾的抓取时势必会对垃圾造成二次损坏,从而产生新的垃圾;而且该机构的抓取空间较小,仅仅只在卫星的附近进行垃圾的抓取,目标范围较小。该机构在抓取时由于机构本身的约束,势必会有一些死角无法抓取到。
5、对比文件cn211841990u公开了一种太空垃圾捕获软体机器人,包括依次连接的动力装置、控制装置、软体机械臂及软体机械手,动力装置包括储气罐,控制装置包括气源三联件及电磁组,软体机械臂包括外层纤维网,机械臂主体,机械臂气腔以及气管,机械臂气腔为三个绕机械臂主体轴线分布,软体手指包括多个机械臂手指,由手指主体和中间限变层组成,手指为腔体结构。该发明由三节机械臂结构组成,该种结构限制了其无法捕获较远范围的太空垃圾,仅仅只能在卫星或空间站周边进行小范围的捕获;其末端的三只夹爪未必能有效地抓取到不同体积、尺寸的太空垃圾;最后,这只是一款用于地球上抓取的机器人,仅仅只是加上了太空这两个字的噱头,实则跟太空没有任何关系,至于能否用于太空还有待商榷。
6、对比文件cn103770955b公开了一种太空漂浮物捕获装置,包括推进装置、辅助调整装置和抓取装置,该漂浮平台与航天载体通过柔性机构相连接,柔性机构包括多组固定于航天载体表面的导线轮系,设置于航天载体内部或漂浮平台内部的多组卷绳机构以及两端分别与电机和平台连接的绳索组。发明中通过多个绳索操纵一个装有喷射装置的漂浮平台,平台上搭载抓取装置,通过喷射推进装置使漂浮平台接近目标物,通过操控连接在漂浮平台上的绳索长度和辅助推进装置调整平台姿态、角度。该机构为刚性连杆机构,在抓取漂浮物的过程中,对于不同体积大小的漂浮物可能存在无法抓取到;其次,在操纵绳索调整平台角度的时候容易造成角度的不一致,从而无法成功抓取到太空垃圾,可行性并不高。
技术实现思路
1、为了解决上述问题,本发明提供了一种多功能太空软体机器人,可在太空环境中完成太空垃圾清理工作。
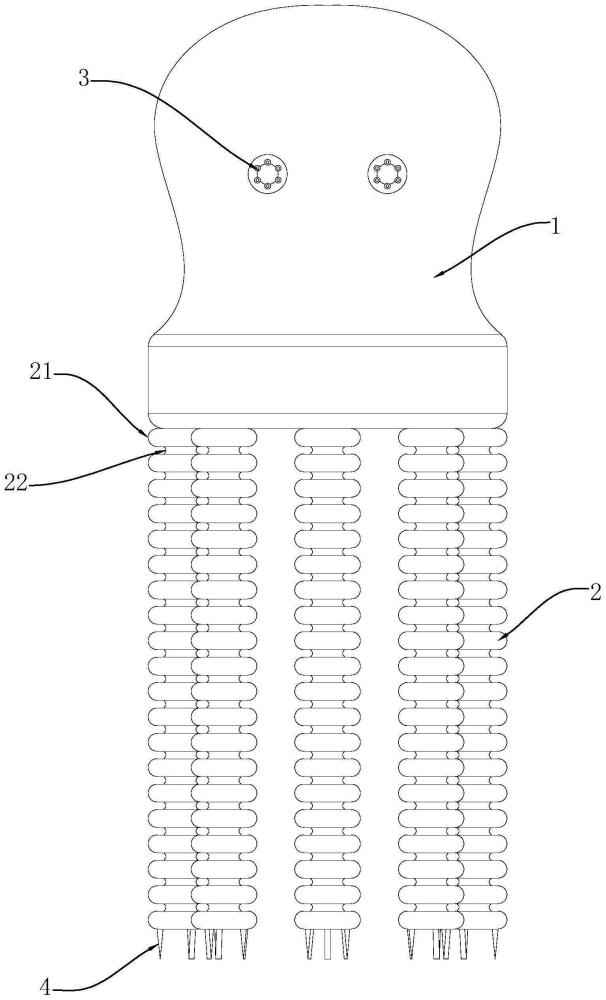
2、为此,本发明的技术方案是:一种多功能太空软体机器人,包括机器人主体和若干尾部形变舱,机器人主体内部通过柔性隔板分隔出控制舱和头部形变舱;所述控制舱内设有控制系统和驱动系统,驱动系统与头部形变舱、尾部形变舱之间设置有流体通道,通过液压或气压控制头部形变舱、尾部形变舱发生形变;所述尾部形变舱为细长软体结构,兼具横向变形和纵向收缩功能,尾部形变舱末端设置有抓爪。
3、在上述方案的基础上并作为上述方案的优选方案:所述头部形变舱内设有若干高分子颗粒,头部形变舱与驱动系统相连通的通口处设有滤网,驱动系统仅抽吸头部形变舱内部流体。
4、在上述方案的基础上并作为上述方案的优选方案:所述驱动系统内设有压缩气体、压缩液体或压缩柔性电流体,压缩气体为压缩空气或压缩惰性气体,压缩液体为压缩液态水、压缩液氢或压缩液态金属。
5、在上述方案的基础上并作为上述方案的优选方案:所述机器人主体外侧设有多个传感器,传感器与控制系统电性连接;所述传感器包括遥感检测传感器、温度检测传感器、湿度检测传感器、磁性检测传感器、视觉检测传感器和超声波接近传感器。
6、在上述方案的基础上并作为上述方案的优选方案:所述尾部形变舱为波纹状结构,包括若干交替设置的波峰、波谷,所述尾部形变舱内部设有流体通道,并与驱动系统相连通。
7、在上述方案的基础上并作为上述方案的优选方案:所述尾部形变舱外侧设有若干轴向分布的第一驱动层,每个波峰和波谷外侧均设有第二驱动层,控制系统通过激励信号控制第一驱动层、第二驱动层发生形变。
8、在上述方案的基础上并作为上述方案的优选方案:所述激励信号为电流信号、电压信号、磁信号或磁流体信号,第一驱动层为条状结构,受激励信号控制伸长或收缩,第二驱动层为环状或网状结构,受激励信号控制扩张或收缩。
9、在上述方案的基础上并作为上述方案的优选方案:所述机器人主体底部设有收纳舱,尾部形变舱可向收纳舱内弯曲并置于收纳舱内。
10、在上述方案的基础上并作为上述方案的优选方案:所述机器人主体和尾部形变舱外侧均设有柔性层,柔性层内侧设有至少一层保护层;所述柔性层由软材料制造,软材料为太空硅橡胶、耐辐射性有机材料或复合材料或自愈合高韧性材料制造而成,所述柔性层外侧设有多种涂层,涂层为紫外线惰性薄膜、风化层复合材料或纳米阵列材料;所述保护层由聚合物基复合材料、石墨烯复合材料或纤维材料制造而成。
11、在上述方案的基础上并作为上述方案的优选方案:所述机器人主体下方设有多个尾部形变舱,所有尾部形变舱由控制系统统一控制或独立控制。
12、本发明设置了头部形变舱和若干尾部形变舱,尾部形变舱兼具横向变形和纵向收缩,既能够同时进行卷曲和包覆的功能,并通过卷曲或包覆来实现太空垃圾的抓取,也可以实现星球表面的运动。头部形变舱可在流体的驱动下被压缩,从而产生向内凹的趋势,一旦里面的流体被完全排出,头部内的高分子颗粒间距减小,并且呈现相互挤压的趋势,使得头部变硬,从而实现物体的直接包覆。
13、当软体机器人需要进行太空垃圾的清理时,尾部形变舱首先在压力的作用下伸长,当接近太空垃圾时,通过第一驱动层实现形变舱向垃圾方向弯曲包覆,进而卷曲式的收集太空碎片,同时,每个尾部形变舱的波谷结构也能夹取到周边太空垃圾。在收集到太空垃圾后,可以将垃圾储藏在头部形变舱上,头部形变舱产生内凹的弯曲变形,从而夹持垃圾。
14、当软体机器人需要着陆进行地表探测时,尾部形变舱可采用多种形式来实现行进功能:
15、①采用跳跃式运动,即尾部形变舱在初始状态下向着收纳舱轴心方向合拢,每个尾部形变舱均产生小角度的形变,该角度控制在30°以内即可,当需要运动时先给尾部形变舱施加正向压力,产生定向伸长,然后施加负向压力缩短,往复运动即可形成类似于弹跳式的行进动作;
16、②采用旋转式运动,即尾部形变舱在远离收纳舱轴心方向的侧向角度产生弯曲形变,然后每个形变舱交替形变,即可产生旋转式的运动;
17、③采用抓取式运动,即将形变舱远离收纳舱轴心方向产生大角度的定向形变,然后给其中的部分形变舱施加垂直于收纳舱轴心方向的定向变形,使其能够接触地表,然后进行正负压的交替运动,即可实现行进功能。
18、当软体机器人完成作业,需要返回太空舱休息时,只需要将尾部形变舱收纳起来即可。即先给每个尾部形变舱施加一定的负压,先让形变舱快速收缩变形,然后在第一驱动层的作用下产生定向形变,使得尾部形变舱向收纳舱轴心处弯曲,尾部形变舱末端藏于收纳舱内。
19、与现有技术相比,本发明的有益效果是:
20、1、本发明整体由高分子航空航天材料制造,并且具有多层保护层,能够轻松应对太空复杂的环境变化,如超高真空、极端温度、高能辐射、高能粒子、太空碎片、微重力等等,能够针对太空不同的恶劣环境实现作业,为人类征服太空提供有力保障,具有较好的前景和技术优势。软体机器人具有多个自由度,能够实现任意形变,能够应对复杂多变的太空环境,可控性能好,未来可在太空进一步的应用。
21、2、本发明的太空软体机器人采用柔性材料制造,体积小、重量轻,具有较低的发射成本;由于体积较轻,在星球表面作业时不会破坏星球本身的地表结构;柔性外壳具有较强的适应性,能够通过卷曲或包覆捕获不同体积大小的太空垃圾。
22、3、本发明的太空软体机器人采用柔性结构制造能够有效稀释并吸收能量,能够在与太空垃圾碰撞时吸收产生的能量,防止自身受到损伤;同时头部形变舱既可以通过变形实现太空垃圾的储藏,又可以实现舱外工具的储藏。
23、4、本发明的太空软体机器人可以通过尾部形变舱的变形组合实现舱外设备的检修,同样在协同宇航员作业时,能够有效保护宇航员,只需要将尾部形变舱展开并包住宇航员即可实现保护。
24、5、本发明的太空软体机器人采用压缩介质驱动的方式,驱动效率高,驱动效果明显,便于携带储存,同时能够有效进行机器人形变舱的变形控制。
25、6、尾部形变舱采用波纹状结构,具有多种功能,并且能够实现全向运动行为;软体机器人在星球表面作业时能够采取不同的前进方式,可以取代宇航员行进,满足不同作业要求。
26、7、采用头部形变舱与尾部形变舱结合的方式,不仅能捕获垃圾,还能及时收集垃圾,头部形变舱采用高分子颗粒进行约束限制,能够实现不同太空垃圾的包覆;尾部形变舱增加了抓爪结构,能够进行星球土质的采样,同时又能进行钻探,探索土质结构。
27、8、本发明的太空软体机器人结束任务后能够将尾部形变舱收缩进收纳舱,极大程度地减小了体积,有利于存放;且机器人退役后能够进行回收,不会产生新的太空垃圾。
- 还没有人留言评论。精彩留言会获得点赞!