一种高机动操纵特性的滑翔式乘波飞行器及其设计方法
本发明专利属于高马赫数滑翔式乘波飞行器,涉及一种高机动操纵特性的滑翔式乘波飞行器。
背景技术:
1、由于升阻比极限公式的存在,常规飞行器在高超声速飞行时存在升阻比屏障,获得的升阻比有限。为了使飞行器具有更高的升阻比,乘波体构型就运营而生,这是一类前缘具有附体激波的升力体,由于乘波体下方的波后高压气流被约束在下表面与附体激波间,无法与上方低压气流连通,乘波体上下表面能够维持较高的压力差,使升阻比大大提高,即“乘波”飞行。最早的“λ”乘波体由英国nonweiler在1959年提出,由于是基于二维平面激波流场的乘波体,其空间利用率较低,限制了其在实用飞行器上的应用潜力。为了提升乘波体的空间利用率,出现了众多基于三维基准流场的乘波体,其中应用最为广泛的是锥导乘波体。
2、滑翔式乘波体飞行器进行的是无动力飞行,在滑翔飞行阶段需要较高的升阻比来提高飞行航程,在末段俯冲阶段需要低升阻比来实施快速、精准地打击。在助推器分离后,飞行器还可以通过改变升阻比,调节弹道轨迹,使飞行器具有很好地机动性,大大增加了拦截难度。因此变升阻比技术是实现飞行器高机动操纵特性的重要发展需求。
3、传统的滑翔式乘波体飞行器通常不具备变形结构,只有固定的运动方式和轨迹,很难满足如今高超音速飞行器高机动性的需求,也很难满足新一代空天飞行器多任务多环境的设计需求。部分滑翔式飞行器可以通过控制气动舵进行偏航、俯仰、滚转等机动性操作,但舵的存在不仅增加了飞行器尺寸,而且难以大幅改变乘波体飞行器升阻比。
技术实现思路
1、发明目的:针对现有技术中滑翔式乘波飞行器升阻比无法大幅度调节、机动性低和内部容积利用率低的问题,提供一种高机动操纵特性的滑翔式乘波飞行器及设计方法。
2、本发明提出用高机动操纵特性的滑翔式乘波飞行器,来代替传统定几何的固定飞行轨迹的滑翔式乘波飞行器,其核心在于通过对变体侧前缘的变形轮廓设计,大幅调节乘波机体升阻比,提升飞行器内部容积利用率。利用简单的旋转变形机理使乘波飞行器具有俯仰、偏航和滚转综合机动特性,使新型乘波滑翔式飞行器的飞行轨迹不可预测,达到高机动性的需求。在侧前缘变形过程中,机体严格封闭,互不干涉,其稳定可靠性有一定的保证。
3、技术方案:一种高机动操纵特性的滑翔式乘波飞行器设计方法,所述设计方法包括如下步骤:
4、步骤一、选用锥导乘波体为飞行器的基础构型,所述乘波体包括固定段机体和位于固定段机体左右两侧的变体侧前缘,所述变体侧前缘可旋转至所述固定段机体内;左右两侧的变体侧前缘分别记为左侧变体侧前缘和右侧变体侧前缘;
5、步骤二、确定乘波体的前缘线;
6、步骤三、确定乘波体上表面的高度和曲率;
7、步骤四、确定乘波体上表面到乘波体固定段机体下表面的最大距离;
8、步骤五、设计变体侧前缘,所述左侧变体侧前缘和所述右侧变体侧前缘设计方法相同;所述左侧变体侧前缘的设计步骤如下:
9、步骤1)、初步确定左侧变体侧前缘的上表面和下表面的形状;
10、步骤2)、确定左侧变体侧前缘的旋转轴;
11、步骤3)、根据升阻比提升需求,设计变体侧前缘的垂向投影尺寸;
12、步骤4)、根据左侧变体侧前缘的垂向投影尺寸,确定旋转轴在机体上的位置;
13、步骤5)、约束左侧变体侧前缘边长间的关系;
14、步骤6)、确定左侧变体侧前缘旋转范围。
15、进一步的,所述步骤二中确定乘波体的前缘线的方法为:
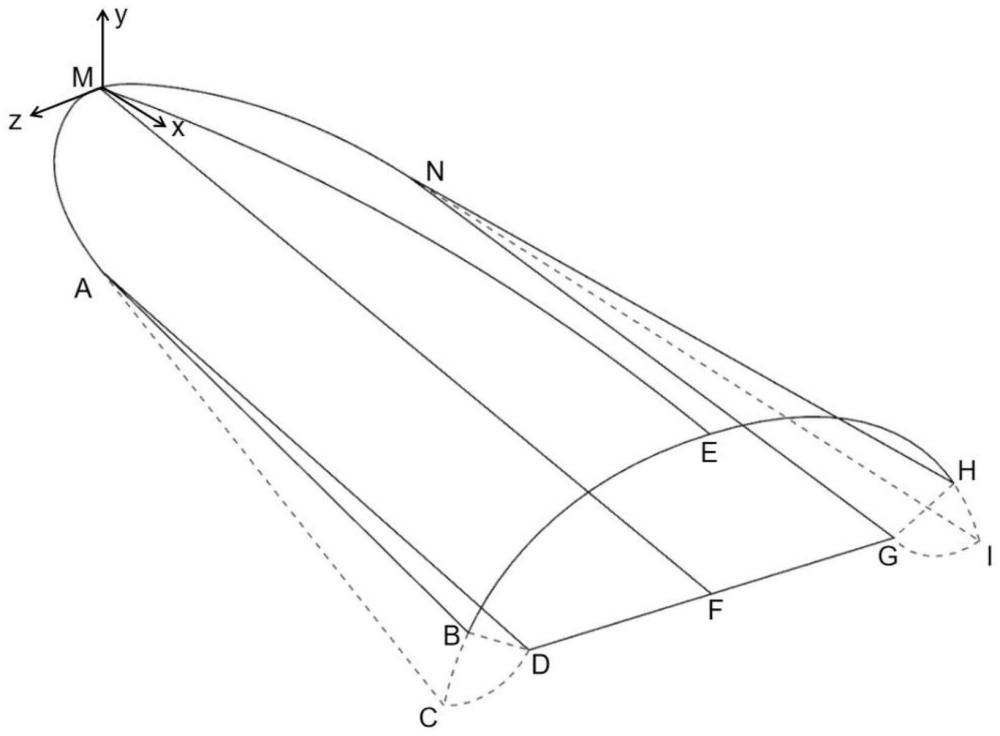
16、在已知乘波体的基准锥锥角、攻角和母线轮廓,采用笛卡尔坐标系,x为流向,y为垂向,z为横向,得到锥型基准流场,产生圆锥激波面;通过一个平行于来流方向的截取平面横切圆锥激波面,两面的交线即为乘波体的前缘线cmi,其中,m为前缘线前端点,c和i分别为前缘线的后端点;ci的直线距离即为乘波体的宽度为w。
17、进一步的,步骤三中确定乘波体上表面的高度和曲率的方法为:
18、采用几何过渡设计乘波体的上表面,在已知前缘线的前提下,根据乘波飞行器内部装填需求,设定机体上表面高度和曲率,同时使飞行器上表面光滑、连续;假设e点是乘波体上表面的最高点,则乘波体的上表面记为cmie;其中,me是外凸样条曲线,e点沿来流方向的切线方向与x轴平行;cei为乘波体上表面的后缘线,cei为外凸样条曲线且连续光滑,其中,e点切线方向与横向z轴平行,斜率为0;e点到ci所在直线的距离为乘波体上表面的高度h,h即乘波体的高度。
19、进一步的,步骤四中确定乘波体上表面到乘波体固定段机体下表面的最大距离的方法为:
20、假设固定段机体下表面为面dmgf,面dmgf是在基准流场中对前缘线进行流线追踪得到的;其中dg为固定段机体下表面的后缘线,dg近似于一条直线,f为dg的中点;e点到f点的距离即为乘波体上表面到乘波体固定段机体下表面的最大距离h;m点到f的直线距离为乘波体的长度l。
21、进一步的,左侧变体侧前缘的设计步骤如下:
22、步骤1)、初步确定变体侧前缘的上表面和下表面的形状;
23、将变体侧前缘设计为锥形结构,假设左侧变体侧前缘的上表面为cab,为了保证整个乘波体上表面的封闭性,则a点在乘波体的左侧的前缘线cm上,b点在乘波体上表面的后缘线cei上;
24、为了保证乘波体下表面的封闭性,则左侧变体侧前缘的下表面为面cad,且下表面cad为圆锥曲面,后缘曲线cd是以b为圆心,bc为半径的圆弧;
25、步骤2)、选择ab为左侧变体侧前缘的旋转轴;
26、步骤3)、根据升阻比提升需求,设计变体侧前缘的垂向投影尺寸;具体步骤如下
27、①已知整个机体长度为l,宽度为w,高度为h,机体的细长比(l/w)控制在1.8~3.0;变体侧前缘在展开和收缩两个状态时,垂向投影宽度变化为wd,wd为b与c点在水平z轴方向的距离;垂向投影长度为l,l为a点到左侧变体侧前缘的底面轮廓面bcd的距离;
28、②通过升阻比调节率要求,可知两侧变体侧前缘旋转前后的垂向投影面积变化δs,δs=2*0.5*l*wd,再根据wd与l的比例关系,可知wd/w和l/l;
29、③已知l,w,wd/w和l/l,计算出wd和l;
30、步骤4)、根据左侧变体侧前缘的垂向投影尺寸,确定旋转轴在机体上的位置;
31、已知左侧变体侧前缘的垂直投影长度l和垂向投影宽度wd,且在直线bc与横向z轴的夹角45°<θ<90°条件下,可知,a点在前缘线上的具体位置,b点在上表面后缘线上的具体位置,b点距离前缘线后端点c的具体垂直距离为h1;
32、步骤5)、约束左侧变体侧前缘边长间的关系;
33、后缘曲线cd是以b为圆心,bc为半径的圆弧,则直线bc与bd等长;将直线ac与ad设计为等长;同时为了避免变体侧前缘在完全收进去时与上表面干涉,当bc边旋转到bd边的位置,则∠cbd<90°,在上述条件下确定d点的位置;
34、步骤6)确定左侧变体侧前缘旋转范围;
35、左侧变体侧前缘由展开状态向内旋转的角度为保证左侧变体侧前缘旋转进入机体时不与上表面干涉,同时保证机体的封闭性,则
36、进一步的,所述步骤5)中,∠cbd取70°~80°。
37、有益效果:
38、(1)本发明基于传统的锥导乘波体在结构上做出改进,将乘波体的侧前缘部分做成变体结构,采用简单的旋转变形机理,在不增加飞行器尺寸和不牺牲机体内部装填空间的同时,充分地利用了乘波体边缘狭长的不可装填空间,提升了飞行器内部空间的利用率。
39、(2)同时新型滑翔式乘波机体能够改变构型,在变体侧前缘展开状态下,下表面高压区与上表面低压区封闭,飞行器具有较大升阻比;变体侧前缘旋转进机体后,上下表面的高低压区产生溢流,使机体升阻比大幅度下降。
40、(3)通过调节两侧变体侧前缘旋转进机体的程度可使飞行器具有俯仰、偏航和滚转综合机动性能,且整个机体封闭完整,无结构干涉,可实现升阻比无极调节,具有高机动操作特性。
- 还没有人留言评论。精彩留言会获得点赞!