一种静电薄膜电机直接驱动的仿生扑翼飞行器
本发明属于仿生飞行,尤其涉及一种静电薄膜电机直接驱动的仿生扑翼飞行器。
背景技术:
1、仿生扑翼飞行器是模仿鸟类、昆虫等生物的飞行方式而设计出的一种飞行器,这类飞行器通过模拟生物的周期性扑翼运动来产生升力和推进力,具有体积小、机动性高、噪音小等优点;仿生扑翼飞行器在诸多方面展现出了优越的性能,使其在民用和军事领域具有广阔的应用前景。
2、在现有的仿生扑翼飞行器中,由于微型电磁电机的扭矩小,绝大部分技术方案都要通过大传动比的齿轮组和连杆机构来提高扭矩实现传动;然而,大传动比的齿轮组具有非常大的惯性力,在频繁的往复运动过程中,会造成大量的能源损耗,另外,齿轮结构存在背隙、复杂的齿轮组与连杆机构产生较大的积累误差、难以实现运动的精确控制;采用连杆机构进行传动时,传动效率也不高,并且曲柄的运行状态与从动件的运动状态之间存在复杂的非线性关系,因此,难以实时精确地调整仿生翼的扑打速度,不利于精确控制仿生扑翼飞行器的飞行姿态。
3、现有仿生飞行器的方案中,通常采用小型电磁电机,其尺寸和功率都非常小,大量的齿轮组与连杆机构占据了机体很大一部分重量,导致仿生飞行器所能拥有的负载能力十分有限,难以增加更多的装置与设备,严重影响了仿生飞行器在军民领域的实际应用范围。
4、通过上述分析,现有技术存在的问题及缺陷为:
5、现有仿生扑翼飞行器结构复杂、传动路径长、传动累计误差大、能源效率低、负载小、难以实现精确的姿态控制。
技术实现思路
1、针对现有技术存在的问题,本发明提供了一种静电薄膜电机直接驱动的仿生扑翼飞行器。
2、本发明是这样实现的,一种静电薄膜电机直接驱动的仿生扑翼飞行器,本技术方案的必要技术特征在于:它是一种静电薄膜电机驱动的仿生扑翼飞行器,具备独特的结构和功能。飞行器包含机架、左右对称设计的仿生翼、静电薄膜电机、电机驱动飞控系统和电池。仿生翼由静电薄膜电机直接驱动,产生周期性的扑翼运动以实现飞行。尾翼上的升降舵和方向舵也由静电薄膜电机驱动,用于调整飞行姿态。此外,该飞行器具有两种功能模式:一种是静电薄膜电机驱动的扑翼飞行模式,另一种是利用静电吸附力在各种物体表面停留的模式。
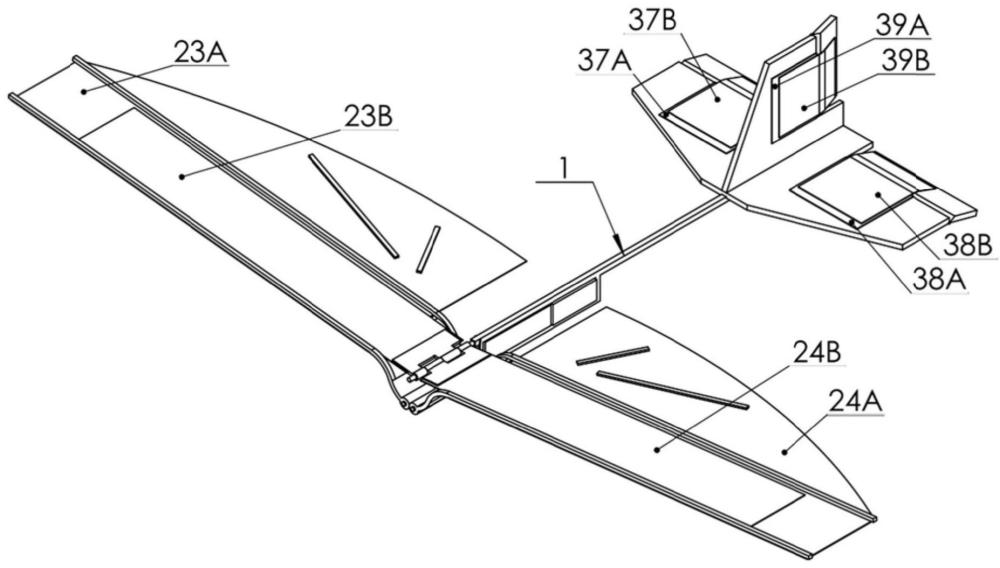
3、所述静电薄膜电机直接驱动的仿生扑翼飞行器包括机架、左右仿生翼、一对复位件、尾翼、数对静电薄膜电机、飞控面板、电池;左右仿生翼与机架铰链;静电薄膜电机直接驱动左右仿生翼实现周期性扑翼运动;所述尾翼上的方向舵和升降舵由静电薄膜电机直接驱动;飞控面板与电池包固定于机架上。
4、进一步,所述左右仿生翼分别位于所述机架的相对两侧,采用对称的结构设计,包含翼骨,翅膜,翅膜上表面设置加强骨芯,增强翅膜的强度、降低破损;其中,翅膜由静电薄膜电机的定子薄膜构成,与动子薄膜组合可形成一对完整的静电薄膜电机,静电薄膜电机动子薄膜通过连接构件与机架铰链,静电薄膜电机直接驱动仿生翼产生扑翼运动,一对复位件辅助静电薄膜电机完成周期性的扑翼运动,产生升力和推进力。
5、进一步,所述尾翼包括水平尾翼和垂直尾翼,水平尾翼包括两个左右对称的水平安定面与升降舵,垂直尾翼包括垂直安定面与方向舵;升降舵与方向舵由静电薄膜电机直接驱动,以改变其与对应安定面之间的夹角,实时调整仿生飞行器的飞行姿态。
6、本发明的仿生扑翼飞行器具有两种功能模式:第一种利用静电薄膜电机的驱动功能,直接驱动仿生扑翼飞行器自由飞行;第二种是利用翅膜与物体外表面间产生的静电吸附力,驻停在建筑物的外墙或玻璃表面,或者驻停于电线杆/树木的外立面,在这种模式下,能量消耗大幅降低,可以提高执行任务过程中的电池包持续时间。
7、本发明的另一目的在于提供一种仿生飞行装置,包括:
8、一个机架,作为主体结构;
9、一对左右对称的仿生翼,位于机架的两侧,每个仿生翼包括翼骨和翅膜,翅膜上表面设有加强骨芯;
10、一对静电薄膜电机,每个电机位于相应的仿生翼侧,用于直接驱动仿生翼产生扑翼运动;
11、连接构件,用于将静电薄膜电机与机架铰链连接;
12、一对复位件,辅助静电薄膜电机完成周期性的扑翼运动;
13、尾翼包括左右水平安定面和垂直安定面,以及舵,其中升降舵和方向舵分别由对应的静电薄膜电机直接驱动;
14、一个飞控面板,负责飞行控制;
15、一个电池包,提供电力。
16、本发明的另一目的在于提供一种仿生翼飞行装置的控制方法,包括以下步骤:
17、使用飞控面板接收飞行指令;
18、控制静电薄膜电机根据接收到的飞行指令调节扑翼的速度、角度和节奏,实现升力和推进力的产生;
19、通过控制尾翼上的升降舵和方向舵实现飞行的方向控制,其中升降舵和方向舵分别由对应的静电薄膜电机直接驱动。
20、本发明的另一目的在于提供一种用于仿生飞行装置的动力系统,特征在于,包括:
21、一对静电薄膜电机,分别位于装置的左右仿生翼侧,每个电机的定子薄膜与动子薄膜组合形成完整的静电薄膜电机,用于直接驱动仿生翼进行扑翼运动;
22、一对复位件,辅助静电薄膜电机完成周期性的扑翼运动;
23、一个电池包,提供所需的电力;
24、一个飞控面板,控制静电薄膜电机的运动以及尾翼上的升降舵和方向舵。
25、结合上述的技术方案和解决的技术问题,本发明所要保护的技术方案所具备的优点及积极效果为:
26、第一、现有仿生扑翼飞行器中,都采用电磁电机来提供动力,由于电磁电机本身的性能限制,采用直驱的方式难以满足仿生翼的动力需求,因此,绝大部分的现有技术方案都采用“电磁电机+高传动比齿轮组”提供传动力,这也增加了仿生扑翼飞行器的整体重量、限制了其负载能力;另一方面,静电薄膜电机作为一种新型的特种电机,能量密度可达约700n/kg或1000n/m2,远远大于电磁电机的能量密度,特别适合于仿生扑翼飞行器的直接驱动,以代替“电磁电机+高传动比齿轮组”。
27、本发明采用静电薄膜电机直接驱动的方式构造仿生扑翼飞行器,可以移除电磁电机、大传动比的齿轮组和大部分连杆机构,使得仿生扑翼飞行器的结构变的更为简单、整机重量更轻、负载能力更强,因此,可以更好地根据任务需求进行功能扩展;另外,直接驱动可以避免长传动链带来的累计误差,进而提高飞控的精度;由于本发明所提供的仿生扑翼飞行器具有两种功能模式:正常飞行和户外物体外立面驻停,在使用过程中,可以结合其驻停功能,提高电池续航能力。
28、第二,本发明通过采用轻薄、柔软、高能量密度的静电薄膜电机直接驱动仿生翼的方式,极大地简化了仿生扑翼飞行器的结构;高能量密度的静电薄膜电机的使用,可以通过增加电机数量,进一步完善仿生扑翼飞行器的功能,如左右双翅的独立控制、更全面的尾翼控制结构;由于可以节省仿生扑翼飞行器整体的空间和重量、提高负载能力,进而提高仿生扑翼飞行器的可扩展功能,如增加高清摄像头,具有更好的军民应用潜力;相比于正常飞行,利用静电薄膜电机的静电吸附能力在户外物体表面驻停时,其能量消耗很低,可以明显增加军事侦查/科学考察的使用时间。
29、第三,作为本发明的权利要求的创造性辅助证据,还体现在以下几个重要方面:
30、(1)本发明的技术方案转化后的预期收益和商业价值为:
31、与现有仿生扑翼飞行器的技术方案相比,本发明的设计方案极其简单,使得系统更稳定、负载能力更高、精度更高、可扩展性更好;本发明适用于军民多种领域,如环境保护、资源调查、休闲娱乐、军事侦察等,具有广阔的市场前景和极高的商业价值。
32、(2)本发明的技术方案填补了国内外业内技术空白:
33、静电薄膜电机是近年来出现的高性能特种电机,具有轻薄、柔软、高能量密度等特点,同样体积/重量的条件下,静电薄膜电机是电磁电机的数倍,非常适合用于仿生飞行器的直接驱动,本发明填补了静电薄膜电机在仿生扑翼飞行器领域的技术空白,并且通过新技术的应用,解决了现有技术方案所面临的问题与挑战。
34、(3)本发明的技术方案是否解决了人们一直渴望解决、但始终未能获得成功的技术难题:
35、现有的仿生扑翼飞行器的技术方案基本都采用“电磁电机+高传动比齿轮组”的方式为仿生扑翼飞行器提供驱动力,这种方法的动力系统不仅复杂、而且重量也大,使得现有的仿生扑翼飞行器的负载能力和续航时间都受到限制;研究人员心中最渴望制造的仿生扑翼飞行器应该拥有接近于鸟和昆虫的飞行能力,包括高负载性能和长时间滞空飞行;鸟和昆虫的肌肉系统,是生物界经过亿万年进化而形成的最高效、最强大的动力系统,也是基于此,鸟和昆虫才拥有了卓越飞行性能;本发明所采用的静电薄膜电机也具有非常卓越的性能,近年来开始用于制作人工肌肉,得益于静电薄膜电机所具有的高能量密度,本发明要比现有仿生扑翼飞行器更接近鸟和昆虫的飞行性能。
36、第四,本发明实施例中描述的仿生飞行装置展现了显著的技术进步,主要体现在以下几个方面:
37、1)高精度的扑翼运动:通过静电薄膜电机直接驱动仿生翼,该装置能够实现高精度和高效率的扑翼运动。这种运动模式不仅提高了飞行的效率,还允许进行复杂的飞行操作,如灵活的起飞、飞行和降落。
38、2)创新的动力传输机制:传统的仿生飞行装置通常需要复杂的机械传动系统。本发明通过直接将电机与仿生翼结合,大大简化了动力传输机制,降低了能量损失,提高了整体系统的可靠性和耐用性。
39、3)改进的飞行控制:结合飞控面板和直驱式静电薄膜电机,提供了更精确的飞行控制。这种控制系统使得飞行装置能够精确响应飞行指令,实现高度灵活和可控的飞行动作。
40、4)节能和环保:静电薄膜电机具有高能效比,相比传统电机在相同功率输出下消耗更少的能量,有助于提高电池的续航时间,同时减少了能源消耗和环境影响。
41、5)可定制性和适应性:结合静电薄膜电机的特点,通过使用三维立体结构建模软件设计仿生翼,该装置提供了高度的可定制性和适应性,能够根据不同的应用需求定制翼型和尺寸。
42、综上所述,本发明通过革新的设计和控制方法,提供了一个高效率、高精度、高稳定性和高可控性的仿生飞行装置,显示了显著的技术进步。
- 还没有人留言评论。精彩留言会获得点赞!