一种建筑工程管理用无人机及建筑工程管理系统的制作方法
本发明涉及工程管理系统,具体来说,涉及一种建筑工程管理用无人机及建筑工程管理系统。
背景技术:
1、建筑工程管理用无人机指的是使用无人机进行建筑工程管理的设备和系统。无人机作为一种新兴的飞行器,可以搭载各种传感器和相机,高效、准确地获取建筑物在施工过程中的实时数据和图像信息,对建筑施工进度、质量等方面进行监控和管理。建筑工程管理用无人机可以提高建筑施工的监控和管理效率,降低工期、成本,并在保证施工安全的同时大幅提升项目管理水平。
2、例如中国专利201911275310.3公开了一种工程现场管理系统,其包括使用无人机对工程现场进行拍摄,进行工程现场管理,且将待测工程现场的图像输入预设神经网络,得到路径规划结果,无人机根据路径规划结果可实现自动化拍摄,从而有效地提高了信息采集的效率;实现了远程对工程现场进行管理,降低了管理成本。但是上述还存在以下不足:
3、(1)在建筑工程现场,无人机降落时会受到路面平整度的影响。因为建筑工地通常存在着许多障碍物和不平整的路面,如果无人机降落在这样的路面上,可能会产生晃动或者不稳定的情况,从而对无人机的安全造成威胁。
4、(2)在建筑工程现场,空气中存在着大量的尘土和其他颗粒物,这些颗粒物可能会对无人机的飞行造成影响。例如,这些颗粒物可能会进入螺旋桨之间的缝隙中,导致螺旋桨转动时出现摩擦和卡顿,影响无人机的飞行稳定性和寿命。
5、(3)建筑物顶部一旦出现破损或者损坏往往会导致安全隐患,如雨季时可能会造成漏水,从而影响建筑物结构的稳定性。因此,建筑工程管理中对建筑物顶部的破损检测非常重要。但是,传统的检测方法存在着一些不足,如设备需要在建筑物顶部进行操作,工作难度较大,并且存在一定的安全风险。
6、针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现思路
1、针对相关技术中的问题,本发明提出一种建筑工程管理用无人机,以克服现有相关技术所存在的上述技术问题。
2、为此,本发明采用的具体技术方案如下:
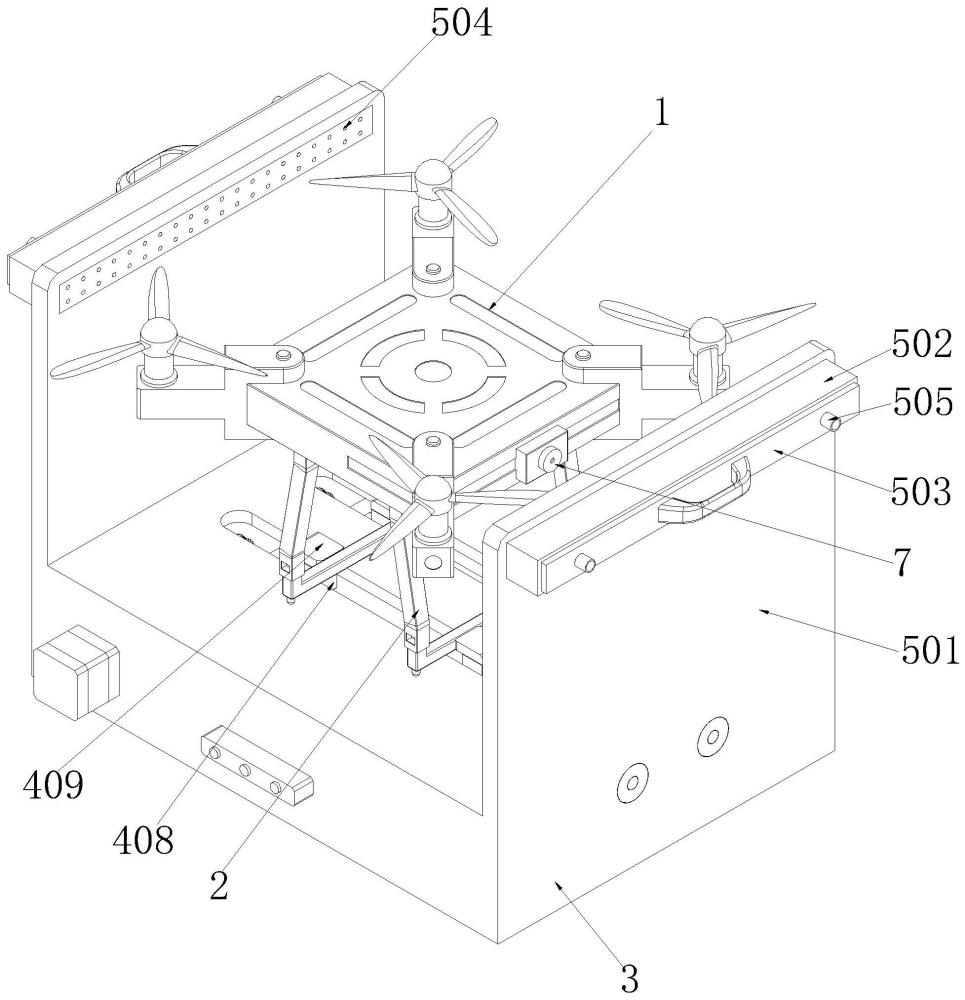
3、一种建筑工程管理用无人机,包括无人机,无人机的底端设置有机体平衡支撑机构,机体平衡支撑机构的底端设置有底座;底座的内部设置有机体固定机构,且机体固定机构的顶端贯穿底座的顶部并延伸至机体平衡支撑机构的底部两端,底座的顶部两端均设置有螺旋桨除尘机构;无人机内依次设置有定位模块、异常检测模块及通信模块,无人机底端侧壁设置有摄像头;定位模块,用于对无人机进行定位,并将无人机的定位信息发送至通信模块;摄像头,用于获取建筑工程现场的建筑物顶部图像;异常检测模块,用于获取摄像头采集的图像,并检测建筑物顶部是否发生异常,若发生异常,则将异常信息发送至通信模块;通信模块,用于与控制中心通信。
4、进一步的,为了能够方便的打开机体平衡支撑机构,进而能够便利地对机体平衡支撑机构内部的零部件进行维护保养,提高使用时的稳定性,机体平衡支撑机构包括设置在无人机底端的四个支腿,相邻的两个支腿之间设置有横向加强杆,横向加强杆的两端均设置有竖杆,竖杆的顶端延伸至支腿内,且竖杆的顶端设置有连接板,连接板的中部设置有连接孔;连接板的侧边且位于支腿内设置有方形块,方形块的内部横向设置有弹簧安装孔,弹簧安装孔的内部设置有第一弹簧,第一弹簧靠近连接孔的一端设置有连接轴,且连接轴远离第一弹簧的一端延伸至连接孔内;第一弹簧远离连接孔的一端设置有堵头,堵头远离第一弹簧的一端设置有凹槽。
5、进一步的,为了在无人机降落至建筑工程场地的地面上时,每个支撑脚能够根据地面的形状进行不同程度的压缩,进而能够适应不平整的路面,进而无人机降落在这样的路面上时,减少晃动或者不稳定的情况,减少对无人机的安全造成威胁的情况,机体平衡支撑机构还包括设置在竖杆内部的滑槽,滑槽的内部顶端设置有横轴,横轴与减震器的顶端连接,减震器的底端连接有滑块,减震器的外侧套设有第二弹簧,滑块的底端设置有支撑脚,且支撑脚的底端延伸至竖杆的底端。
6、进一步的,为了能够自动的带动两个压块固定或松开无人机及机体平衡支撑机构,机体固定机构包括设置在底座内部的第一转轴,第一转轴的一端设置有电机,第一转轴的中部设置有两个蜗杆。
7、进一步的,为了能够带动两个压块固定或松开无人机及机体平衡支撑机构,进而提高无人机被螺旋桨除尘机构清理灰尘时的稳定性,避免无人机倾倒,提高无人机的安全,机体固定机构还包括设置在第一转轴顶端且与该第一转轴相垂直的两个第二转轴,第二转轴的一端设置有与蜗杆相啮合的蜗轮;第二转轴的中部两端均开设有螺纹槽,底座的顶端且位于第二转轴的上方设置有通槽,第二转轴的中部两端均套设有移动块,移动块的顶端贯穿通槽并延伸至机体平衡支撑机构的底部,且移动块的顶端设置有压块;第二转轴中部两端的螺纹槽的螺纹方向相反,且移动块横向移动时与通槽滑动配合。
8、进一步的,为了能够在无人机闲置时,通过流动的气体将螺旋桨上的灰尘吹离,且能够防止建筑工程场地内的灰尘落在无人机的螺旋桨上,进而避免灰尘导致螺旋桨转动时出现摩擦和卡顿,有利于提高无人机的飞行稳定性和寿命,螺旋桨除尘机构包括设置在述底座顶部两端的支撑板,支撑板的顶端设置有安装槽,安装槽设置有腔体,腔体靠近无人机的一端设置有吹尘孔,腔体远离无人机的一端设置有进气接头。
9、进一步的,所述检测建筑物顶部是否发生异常包括以下步骤:
10、s1、利用所述无人机采集建筑物顶部图像,并将建筑物顶部图像中背景与目标分割,得到建筑物目标图像;
11、s2、对建筑物目标图像进行滤波处理,得到待处理图像;
12、s3、构造0°、45°、90°及135°方向的结构元素,并通过四个结构元素对待处理图像进行形态学变换,得到四个模版;
13、s4、通过改进边缘算子对四个模版进行检测,得到四个边缘信息,且对四个边缘信息进行加权平均,得到最终的检测结果;
14、s5、对最终的检测结果进行建筑物顶部破损判定;
15、其中,所述四个模版分别为t1、t2、t3及t4;
16、
17、
18、所述改进边缘算子为:
19、
20、fdef(x,y)=fmax(x,y)-fmin(x,y)
21、fmax(x,y)=max{fd(x,y),fe(x,y),ff(x,y)}
22、fmin(x,y)=min{fd(x,y),fe(xy),ff(x,y)}
23、式中,f(x,y)为改进边缘算子;
24、fd(x,y)为抗噪开闭膨胀型边缘检测算子,fe(x,y)为抗噪开闭腐蚀型边缘检测算子,ff(x,y)为抗噪开闭膨胀腐蚀型边缘检测算子。
25、进一步的,所述对建筑物目标图像进行滤波处理包括以下步骤:
26、s21、对建筑物目标图像进行中值滤波;
27、s22、腐蚀操作处理:构建一个矩形结构元素,并在建筑物目标图像中将每个像素与矩形结构元素进行比较,得到该像素的值,若该像素周围存在黑色像素,则该像素的值也为黑色,否则为白色;
28、s23、膨胀操作处理:腐蚀操作之后,在建筑物目标图像中将每个像素与矩形结构元素中所有像素进行比较,若存在矩形结构元素中任一个位置是1,且该位置与建筑物目标图像中的像素相对应是黑色,则相应的建筑物目标图像中的像素值为黑色。
29、进一步的,所述对最终的检测结果进行建筑物顶部破损判定包括以下步骤:
30、s51、对最终的检测结果进行大津法阈值化得到二值图像,在得到二值图像后,通过分析图像中像素值为1的像素点的空间分布,来检测出异常区域;
31、s52、通过计算异常区域边界上的白色像素点数量总和,获得异常区域的周长;
32、s53、将异常区域作为一个圆形,并用圆的面积公式计算异常区域的面积大小;
33、s54、若异常区域的面积大于等于预设值,则异常区域判定为建筑物顶部破损区域;
34、s55、若建筑物顶部破损区域的面积与建筑物目标图像的面积比值大于等于预设比值,则进行破损预警。
35、一种建筑工程管理系统,该建筑工程管理系统使用了上述一种建筑工程管理用无人机。
36、本发明的有益效果为:
37、(1)本发明的无人机装置能够及时的清理螺旋桨上的灰尘、适用于建筑工程场所的降落条件,使得无人机可以高效且安全的使用。
38、(2)通过设置螺旋桨除尘机构,从而能够在无人机闲置时,通过流动的气体将螺旋桨上的灰尘吹离,且能够防止建筑工程场地内的灰尘落在无人机的螺旋桨上,进而避免灰尘导致螺旋桨转动时出现摩擦和卡顿,有利于提高无人机的飞行稳定性和寿命;通过设置机体固定机构,从而能够自动的带动两个压块固定或松开无人机及机体平衡支撑机构,进而提高无人机被螺旋桨除尘机构清理灰尘时的稳定性,避免无人机倾倒,提高无人机的安全。
39、(3)通过设置机体平衡支撑机构,从而在无人机降落至建筑工程场地的地面上时,每个支撑脚能够根据地面的形状进行不同程度的压缩,进而能够适应不平整的路面,进而无人机降落在这样的路面上时,减少晃动或者不稳定的情况,减少对无人机的安全造成威胁的情况;且能够方便的打开机体平衡支撑机构,进而能够便利地对机体平衡支撑机构内部的零部件进行维护保养,提高使用时的稳定性。
40、(4)通过摄像头对建筑工程现场的建筑物顶部图像进行获取,并检测建筑物顶部是否发生异常,从而能够低成本、高效的检测建筑物的顶部,同时获得更准确的建筑物顶部破损数据、提高检测精度,实现全自动、智能化的管理和监控。
- 还没有人留言评论。精彩留言会获得点赞!