用于卫星有效载荷压紧释放的摆臂机构的制作方法
本发明属于航天器结构机构,具体地,涉及一种用于卫星有效载荷压紧释放的摆臂机构。
背景技术:
1、受运载火箭整流罩包络尺寸约束,航天器发射阶段多采用压紧释放机构将可展开式太阳翼、天线等外伸活动部件固定在星体上,入轨后机构解锁将被压紧对象释放。
2、现有的相关技术成果主要如下:
3、(1)星载设备压紧释放机构(专利文献cn101486383a),该专利文献公开了一种星载设备压紧释放机构,由安装基座、抗剪销钉、压紧机构、隔离机构和解锁装置组成,其特征在于安装基座与卫星固连,目标载荷、压紧机构、隔离机构依次安装在基座上,目标载荷通过抗剪销钉进行径向定位;压紧机构的一端与目标载荷接触并进行约束,另一端与隔离机构接触,将目标载荷对压紧机构产生的作用力转换为摩擦力,隔离机构另一端与解锁装置连接,通过解锁装置提供的预紧力与隔离机构的摩擦力平衡,实现目标载荷的压紧锁定;解锁时,解锁装置释放所属预紧力,隔离机构转动,对压紧机构的摩擦力消失,压紧机构转动,解除对目标载荷的约束,目标载荷沿抗剪销钉轴向释放。该压紧释放机构适用于目标载荷离星体较近,承载不大的情况。
4、(2)一种堆叠式卫星星箭压紧释放机构(专利文献cn115158701a),该专利文献公开了一种堆叠式卫星星箭压紧释放机构,包括压紧机构、基座、转接机构、推力机构和解锁机构,其特征在于每个卫星的侧壁周向均布若干个压紧机构,压紧机构用于将多个卫星堆叠放置形成多层结构;压紧机构通过转接机构固定安装在基座上;基座固定在火箭适配器;基座底部设置有解锁机构;解锁机构用于提供沿径向向内的预紧力,使压紧机构约束卫星的运动;解锁机构解锁后,在推力机构配合下,压紧机构向外运动,解除对卫星的约束。该压紧释放机构适用于大量平板构型卫星堆叠状态,一箭多星发射任务,实现星-箭、星-星之间的压紧释放。
5、(3)压紧释放机构及其方法(专利文献cn109305391a),该专利文献公开了发明:压紧释放机构及其方法,所述压紧释放机构包括基座、承力组件、弹簧和弹簧套。承力组件包括解锁端、主承力件和调整端,调整端包括角度微调组件和调节螺母;解锁端安装在基座上;弹簧套安装在离基座最远的板件上;调整端置于所述弹簧套内;主承力件贯穿各板件后一端与解锁端连接;角度微调组件和调节螺母依次套在主承力件另一端上,角度微调组件支撑在主承力件上,通过拧紧调节螺母施加压紧力,该压紧力通过角度微调组件传递至各板件;弹簧置于所述弹簧套内,一端与弹簧套连接,另一端与主承力件连接。该压紧释放机构主要用于平板型天线的折叠收拢。
6、(4)大型空间机构压紧释放装置(专利文献cn103754391a),该专利文献公开了发明:大型空间机构压紧释放装置,其包括压紧释放机构、桅杆、+y太阳翼、-y太阳翼、顶板、相机、定向天线;所述桅杆底部以及巡视器围栏分别设置于所述顶板上;所述定向天线、释放压紧机构、相机分别安装在所述桅杆上,所述+y太阳翼与-y太阳翼分别与巡视器围栏相连接;其中所述压紧释放机构用于同时对桅杆、+y太阳翼以及-y太阳翼进行压紧。该压紧释放机构主要用于平板太阳翼的压紧释放。
7、(5)一种连杆式压紧释放装置(专利文献cn207496963u),该专利文献公开了一种连杆式压紧释放装置,包括基座、压紧螺母、法兰、压紧杆、压紧连杆、上支撑连杆、解锁弹簧、解锁销、解锁滑块、解锁连杆和下支撑连杆。通过压紧连杆与压紧杆的压紧面相互压紧,提高了承受的压紧力。采用压紧连杆、上支撑连杆、下支撑连杆和解锁连杆的连接形式安装于基座上。在锁紧状态下,本压紧释放装置形成两级死点,使得压紧连杆无法驱动上支撑连杆,上支撑连杆无法驱动解锁连杆。该装置主要用于维纳卫星与运载火箭适配器的连接释放,适用于传力路径短、承载较小的场合。
8、为实现指向控制和大范围扫描,大型卫星有效载荷5被布置在两轴转台4上,远离卫星平台。两轴转台4各轴均具备±30°转动能力,有效载荷5运动包络大,包络范围内不允许有干涉物。有效载荷5这种安装和工作模式,要求压紧释放机构具有长距离传力性能,实现有效载荷5与卫星平台的压紧连接;且释放后,机构不能出现在有效载荷5运动包络范围内。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种用于卫星有效载荷压紧释放的摆臂机构。
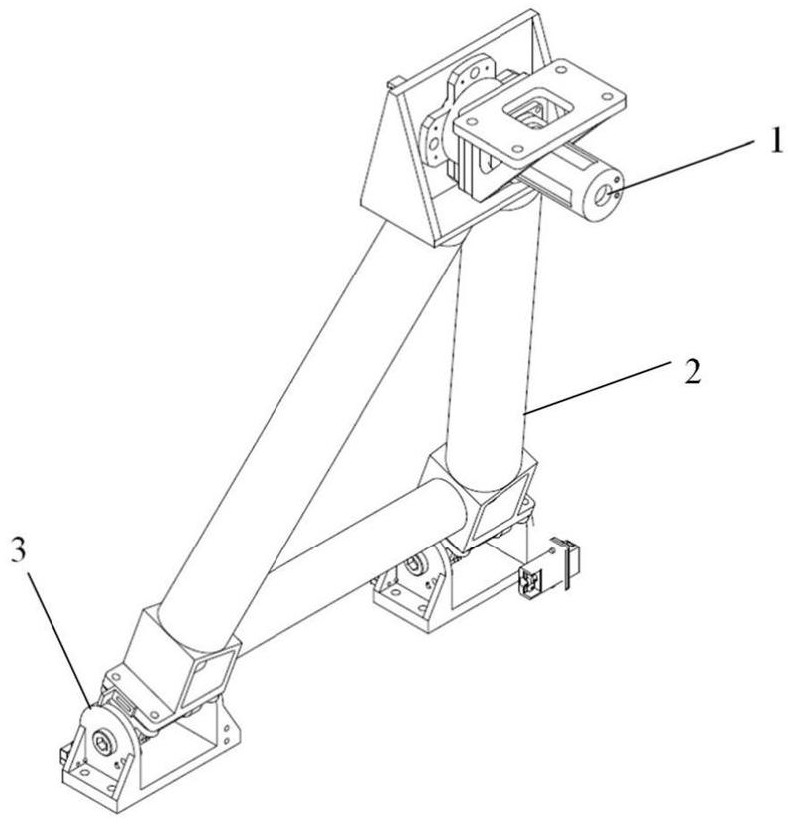
2、根据本发明提供的一种卫星有效载荷压紧释放的摆臂机构,包括:解锁组件1、三角框架2、翻转组件3;
3、所述解锁组件1包括:螺母组件101;
4、所述三角框架2包括:第一接头202,第二接头203;
5、所述翻转组件3包括:母铰302;
6、解锁组件1的螺母组件101通过螺钉与三角框架2的第一接头202连接,两个翻转组件3通过母铰302与三角框架2的第二接头203螺接。
7、优选地,解锁组件1还包括:螺栓组件102和支架103;
8、螺栓组件102的螺栓穿过支架103,连接螺母组件101,实现三者的依次连接,支架103上设置有安装孔,解锁组件1通过支架103上提供的安装孔与有效载荷5连接。
9、优选地,三角框架2还包括:两根第一碳纤维圆杆201和第二碳纤维圆杆204;
10、第二碳纤维圆杆204两端各胶接一个第二接头203,每个第二接头203各胶接有一根第一碳纤维圆杆201,两根第一碳纤维圆杆201均胶接于第一接头202。
11、优选地,翻转组件3还包括:公铰301、转轴303、扭簧304、锁止挂钩305、微动开关306;
12、母铰302通过螺钉与三角框架2的第二接头203连接,公铰301通过转轴303与母铰302形成转动副,扭簧304套装在转轴303上,提供摆臂机构驱动力矩,锁止挂钩305和微动开关306螺接在公铰301上。
13、翻转组件3采用扭簧304作驱动力;翻转组件3锁定到位后,通过锁止挂钩305锁住母铰302进行锁定,防止三角框架2自由晃动;微动开关306设置在翻转组件3的底座处,翻转组件3锁定到位后,通过三角框架2触发微动开关306产生到位信号。
14、优选地,所述螺母组件101采用热刀作为解锁作动元件,实现解锁;解锁组件1通过支架103与有效载荷5连接。
15、优选地,所述第一碳纤维圆杆201和第二碳纤维圆杆204采用碳纤维m55j缠绕成型。
16、优选地,第一接头203和第二接头203由铝合金机加工成型。
17、根据本发明提供的一种所述的卫星有效载荷压紧释放的摆臂机构的使用方法,包括:
18、步骤s1:有效载荷5压紧过程:
19、将四套摆臂机构分布在有效载荷5基准板四个角点,形成均布支承构型;所述四套摆臂机构通过支架103提供的与有效载荷5的机械接口,采用螺钉安装到有效载荷5基准板后;两轴转台4反吊安装在有效载荷5基准板反面,形成有效载荷5、摆臂机构、两轴转台4的组合体;最后将组合体整体吊装至卫星平台顶板上,摆臂机构通过公铰301提供的机械接口,采用螺钉安装至平台顶板上,完成有效载荷5与卫星平台的总装,实现压紧;
20、步骤s2:有效载荷5释放过程:
21、摆臂机构在遥控指令控制下解锁时,螺母组件101和螺栓组件102分离,摆臂机构在扭簧304驱动力矩作用下向外翻转,翻转到位后由锁止挂钩305锁定,微动开关306产生锁定到位遥测信号,实现有效载荷5的释放。
22、优选地,分布于有效载荷5基准板四个角点的四套摆臂机构分成两组,分两次先后展开;处于对角位置的两套摆臂机构在遥控指令控制下同时解锁。
23、根据本发明提供的一种卫星,包括所述的卫星有效载荷压紧释放的摆臂机构。
24、与现有技术相比,本发明具有以下有益效果:
25、1、有效载荷5位于两轴转台4上,远离卫星平台,通过布置多组摆臂机构构成四点八杆支承构型,成为稳定封闭的结构系统,能够承受卫星发射过程中各个方向的静动态力学载荷,实现可靠压紧。
26、2、大型有效载荷5远离星体且两维转动,运动包络大,摆臂机构既能完成有效载荷5远距离可靠压紧,释放后又不干涉有效载荷5运动。
27、3、摆臂机构采用高刚度、轻量化和大承载的碳纤维三角框架,模态频率高,振动响应小,在卫星发射阶段可为有效载荷5提供良好力学环境。
28、4、摆臂机构采用热刀作为解锁作动元件,无火工炸药污染,产生的冲击小,不会对有效载荷5造成损伤。
29、5、摆臂机构采用扭簧驱动和挂钩锁定,可靠性高。
30、6、四套摆臂机构分成两组,对角两套摆臂机构同时解锁展开,对卫星姿态的干扰小,利于卫星姿态稳定。
- 还没有人留言评论。精彩留言会获得点赞!