一种在轨高可靠的二维转动机构控制方法及星载软件
本发明涉及卫星平台及星载软件,特别涉及一种在轨高可靠的二维转动机构控制方法及星载软件。
背景技术:
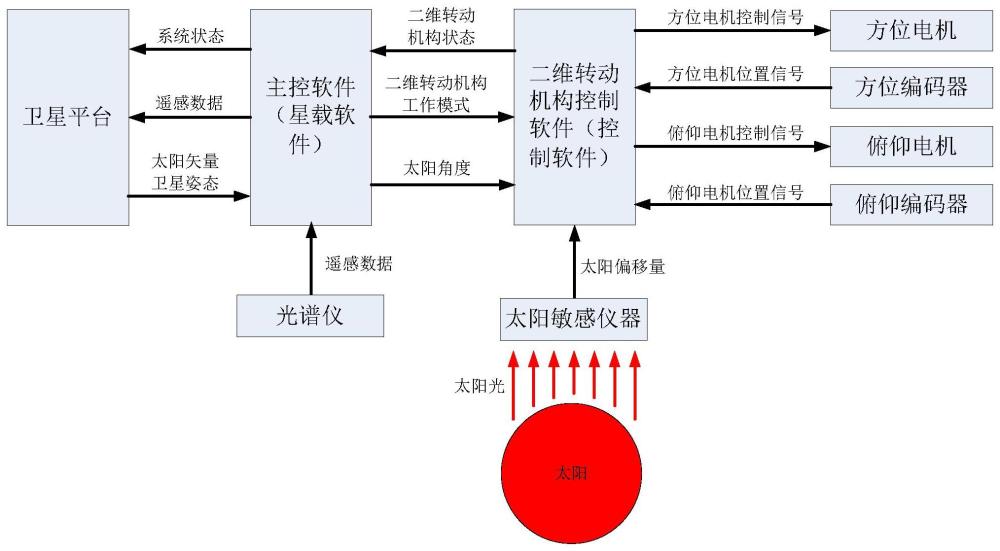
1、如图1和2所示,二维转动机构随太阳遥感仪器搭载在卫星平台上,执行对日持续跟踪任务。光谱仪、太阳敏感仪器固定在二维转动机构上,随二维转动机构转动而转动。星载软件通过切换工作模式控制软件控制二维转动机构做相应动作,将太阳捕获到太阳敏感仪器视场(如±1°范围)内,随即二维转动机构利用太阳在太阳敏感仪视场内的偏移量进行对日闭环跟踪,同时控制光谱仪对日探测并下行遥感数据。
2、星载软件在对太阳探测前需要控制二维转动机构进行对日跟踪,此过程星载软件需要根据在轨测试任务以及太阳角度情况通过控制软件控制二维转动机构执行相应动作,星载软件根据控制软件返回的状态进行模式切换,最终成功实现对日跟踪。且能否实现对日的成功跟踪决定了探测任务的成败。
3、在不可预知的偶尔一帧通讯故障器故障条件下,控制软件无法接收星载软件的控制命令,会导致控制软件无法按照星载软件命令切换工作模式,此情况同样导致探测任务失败。
4、在对日捕获前或者利用太阳敏感仪器对日跟踪时太阳敏感仪故障,星载软件需要及时应对,保证二维转动机构利用其它跟踪方式进行对日跟踪,否则导致探测任务全部或者部分失败。
5、同时太阳敏感仪器在研制过程中往往为了追求高分辨率而视场角设计的较小(如±1°×±1°),且在卫星发射过程中不可避免地存在振动,导致各机械结构坐标系间产生新偏移。由于星载软件已将二维转动机构发射前的各机械结构间坐标系安装矩阵参数固化在软件代码中,因此,结构间新偏移很可能导致二维转动机构在轨无法捕获、跟踪太阳的结果。
6、二维转动机构地面模拟在轨对日捕获、跟踪实验过程复杂,原理为光源位置固定,二维转动机构在方位、俯仰方向均在零点位置时光源与导行镜光轴平行,以模拟太阳。二维转动机构固定在六足平台上,六足平台姿态变换模拟在轨太阳遥感仪器运动。此过程主要影响太阳角度计算准确性的因素包括:
7、1)卫星数据模拟(太阳矢量、卫星姿态);
8、2)模拟卫星数据处理;
9、3)模拟卫星数据分发时序约束;
10、4)根据模拟卫星数据控制六足平台以模拟太阳遥感仪器在轨运动;
11、5)太阳遥感仪器与六足平台间高精度安装;
12、6)二维转动机构在地面上,不是失重状态。
13、以上因素决定地面模拟实验无法做到与在轨情况完全一致,因此,太阳角度计算结果可能存在较大误差或者错误而在地面模拟实验过程中不被发现,进而导致二维转动机构在轨无法捕获、跟踪太阳的结果。
14、由于星载软件对日探测功能在二维转动机构控制功能之后执行,而星载软件的二维转动机构控制功能的执行流程完全依赖于控制软件返回的状态,这要求星载软件的二维转动机构控制功能无论控制软件返回的状态如何混乱,星载软件均不能进入死循环并保证控制功能正常顺利执行,否则会导致整个在轨任务失败。
15、因此,在不可预知的偶尔一帧通讯故障条件下、太阳敏感仪器随时故障条件下、卫星发射过程中二维转动机构的机械结构间存在新偏移的条件下、地面实验无法与在轨情况完全一致条件下以及控制软件返回的状态混乱条件下,如何保证遥感仪器成功完成探测任务或者保证完成整个在轨任务成为难题。
技术实现思路
1、本发明要解决现有技术中的技术问题,提供一种在轨高可靠的二维转动机构控制方法及星载软件。
2、为了解决上述技术问题,本发明的技术方案具体如下:
3、一种在轨高可靠的二维转动机构控制方法,包括以下步骤:
4、步骤一:主控软件接收卫星实时发送的卫星姿态和太阳矢量,计算太阳角度并实时发送给二维转动机构的控制软件,主控软件根据在轨测试任务以及太阳角度情况进行对日跟踪;
5、步骤二:主控软件发送待机模式给控制软件,当控制软件返回的工作模式为待机模式时,则执行步骤三,否则主控软件再发送一次待机模式给控制软件后,执行步骤三;
6、步骤三:主控软件发送重加载模式给控制软件,当控制软件返回的工作模式为重加载模式时,则执行步骤四,否则主控软件再发送一次重加载模式给控制软件后,执行步骤四;
7、步骤四:主控软件开始l秒的计时,l的值由控制软件加载时间决定;
8、步骤五:主控软件发送返参模式给控制软件,该模式不干预控制软件的工作,且主控软件实时判断l时间是否到,若l时间到则执行步骤六,否则循环执行步骤五;
9、步骤六:主控软件发送退出故障处理模式给控制软件,当控制软件返回的工作模式为退出故障处理模式时,则执行步骤七,否则主控软件再发送一次退出故障处理模式给控制软件后,执行步骤七;
10、步骤七:主控软件开始r秒的计时,r的值由电子学探测前的预热时间决定;
11、步骤八:主控软件发送程控跟踪模式给控制软件,并实时判断r时间是否到;当r时间未到时,判断太阳角度是否在二维转动机构的转动角度范围内,若不在范围内,则循环执行步骤八,否则执行步骤九;当r时间到时,则执行步骤九;
12、步骤九:若太阳敏感仪器故障或下电状态,则执行步骤十八,否则执行步骤十;
13、步骤十:主控软件开始m秒的计时,m的值由太阳遥感仪器视场以及二维转动机构的转动速度决定;
14、步骤十一:主控软件发送程控跟踪模式给控制软件,并实时判断m秒时间是否到;当m时间未到时,判断程控跟踪模式是否成功,若成功,则执行步骤十二,否则循环执行步骤十一;当m时间到时,则执行步骤十二;
15、步骤十二:主控软件发送搜索模式给控制软件,当控制软件返回的工作模式为搜索模式时,则执行步骤十三,否则主控软件再发送一次搜索模式给控制软件后,执行步骤十三;
16、步骤十三:主控软件开始n秒的计时,n的值由搜索轨迹以及二维转动机构的转动速度决定;
17、步骤十四:主控软件发送返参模式给控制软件,并实时判断n秒时间是否到;当n时间未到时,判断搜索模式是否成功,若成功,则执行步骤十五,否则循环执行步骤十四;当n时间到时,则执行步骤十九;
18、步骤十五:主控软件开始p秒的计时,p的值由太阳遥感仪器视场以及二维转动机构的转动速度决定;
19、步骤十六:主控软件发送导行镜跟踪模式给控制软件,并实时判断p秒时间是否到;当p秒时间未到时,判断导行镜跟踪模式是否成功,若成功,则执行步骤十七,否则循环执行步骤十六;当p时间到时,则执行步骤十九;
20、步骤十七:主控软件开始q秒的计时,q的值由系统最长探测时间决定,并控制系统开始探测;
21、步骤十八:主控软件发送导行镜跟踪模式给控制软件,并实时判断q秒时间到或探测结束;当q秒时间未到且探测未结束,则判断导行镜跟踪模式是否成功,若成功,则循环执行步骤十八,否则执行步骤二十;若q秒时间到或探测结束则执行步骤二十二;
22、步骤十九:主控软件控制系统开始探测;
23、步骤二十:主控软件开始r秒的计时,r的值由系统最长探测时间决定;
24、步骤二十一:主控软件发送程控跟踪模式给控制软件,并实时判断r秒时间到或探测结束;当r时间未到且探测未结束时,则循环执行步骤二十一,当r时间到或者探测结束时,则执行步骤二十二;
25、步骤二十二:主控软件开始s秒的计时,s的值由太阳遥感仪器视场以及二维转动机构的转动速度决定;
26、步骤二十三:主控软件发送回零模式给控制软件,并实时判断s秒时间到或回零完成;当s时间未到且回零模式未完成时,则循环执行步骤二十三,当r时间到或者回零模式完成时,则执行步骤二十四;
27、步骤二十四:主控软件发送待机模式给控制软件并下行遥感数据。
28、在上述技术方案中,步骤二、三、六、十二具备模式重发机制。
29、在上述技术方案中,步骤五、八、十一、十四、十六、十八、二十一、二十三具备模式执行超时模式自动切换机制。
30、在上述技术方案中,步骤十二中,二维转动机构搜索模式的轨迹为多样化设计。
31、一种星载软件,运行在太阳遥感仪器上,用于执行上述的二维转动机构模式转换。
32、在上述技术方案中,所述星载软件根据在轨测试任务以及太阳角度情况进行对日跟踪并将采集的遥感数据下行。
33、本发明具有以下有益效果:
34、本发明的在轨高可靠的二维转动机构控制方法及星载软件,根据在轨探测任务以及太阳角度情况,控制二维转动机构对日捕获、跟踪。首先发送待机模式、重加载模式、退出故障处理模式给控制软件,使控制软件完成对日捕获前的准备工作;发送程控跟踪(预指向)模式给控制软件,直至太阳角度在二维转动机构转动范围内;发送程控跟踪(对日捕获)模式、搜索模式、太阳敏感仪器跟踪模式给控制软件,实现对日跟踪。二维转动机构控制过程中,具备异常处理机制,如具备通讯命令重发机制,解决了在不可预知的偶尔一帧通讯故障条件下导致控制软件无法接收星载软件控制命令的问题;具备灵活的模式切换方法,解决了太阳敏感仪器随时故障条件下可随时切换到程控跟踪模式以保证正常对日跟踪;设置了搜索模式,保证了在卫星发射过程中二维转动机构的机械结构间存在新偏移、地面实验无法与在轨情况完全一致条件下遥感仪器最大可能地实现成功对日捕获,以上措施保证了遥感仪器成功完成探测任务。模式的定时等待机制保证了在控制软件返回的状态混乱条件下二维转动结构控制流程仍能够正常执行,保证了星载软件不会进入死循环从而保证完成整个在轨任务。
35、本发明的在轨高可靠的二维转动机构控制方法及星载软件,在轨有限故障条件下保证了遥感仪器成功完成探测任务或者保证完成整个在轨任务。通讯命令重发机制解决了在不可预知的偶尔一帧通讯故障条件下导致控制软件无法接收星载软件控制命令的问题,灵活的模式切换方法解决了太阳敏感仪器随时故障条件下可随时切换到程控跟踪模式以保证正常对日跟踪,搜索模式的设置保证了在卫星发射过程中二维转动机构的机械结构间存在新偏移、地面实验无法与在轨情况完全一致条件下遥感仪器最大可能地实现成功对日捕获,以上措施保证了遥感仪器成功完成探测任务。模式的定时等待机制保证了在控制软件返回的状态混乱条件下二维转动结构控制流程仍能够正常执行,保证了星载软件不会进入死循环从而保证完成整个在轨任务。
- 还没有人留言评论。精彩留言会获得点赞!