一种基于双目视觉辅助无人机降落的机巢系统和方法
本发明涉及无人机,更为具体的,涉及一种基于双目视觉辅助无人机降落的机巢系统和方法。
背景技术:
1、现阶段,应用较多的辅助无人机精准降落方案主要有:(1)rtk gps定位。无人机通过rtkgps实现无人机精准降落只要给定精准的目标降落位置,再结合无人机自身精确实时位置即可实现精准降落。缺点是系统需要依赖的组件较多,如移动站、固定站、天线、无线传输等,成本昂贵。(2)基于图像识别定位。使用无人机机载图像识别设备去识别地面目标降落点,从而获得目标降落点与无人机的相对位置。在无人机端计算能力有限的情况下,处理视频图像技术难度大,环境复杂时降落点的特征不易获取。同时由于增加了机载计算机和机载图像识别镜头等部分,导致耗电量过快。
2、因此,如何提供一种准确、高效、简易的无人机视觉引导降落算法,对无人机的要求低,使用简单的传感器如gps和无人机图像,能够准确的解决无人机高度问题,解决无人机降落点灵活选取问题,无人机机头朝向调整,以及视觉识别效率等问题,是目前本领域技术人员亟待解决的问题。
技术实现思路
1、本发明的目的在于背景技术存在问题,提供一种基于双目视觉辅助无人机降落的机巢系统和方法,解决无人机在不影响续航的情况下精准降落的问题。
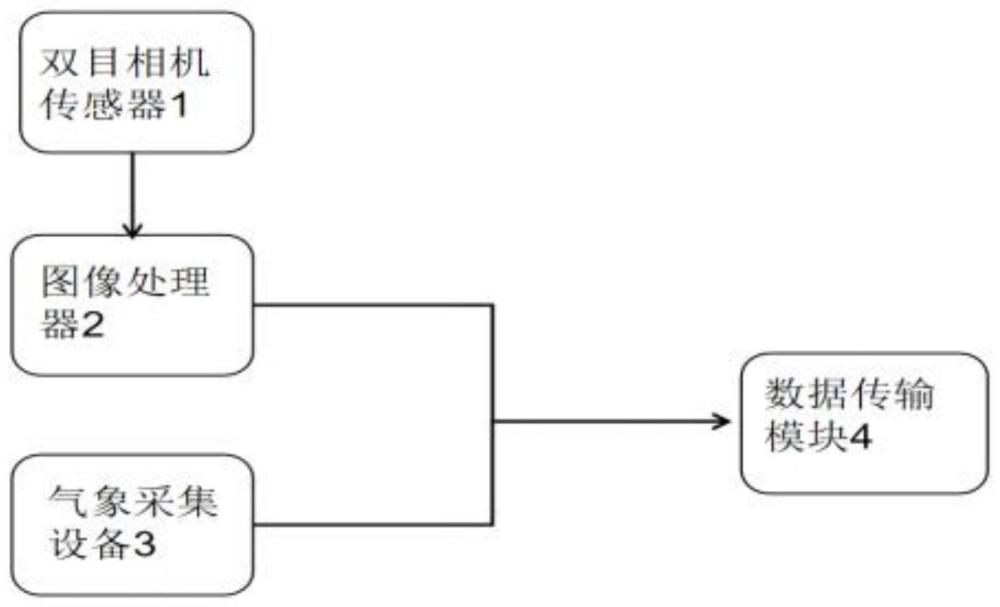
2、为实现上述目的,本发明的技术方案是:一种基于双目视觉辅助无人机降落的机巢系统,包括:安装在无人机机巢待降落区域中心的双目相机传感器、图像处理器、数据传输模块;其中,
3、所述双目相机传感器,用于采集图像信息和高度信息;
4、所述图像处理器,用于对所述双目相机采集到的图像信息进行处理,以获取无人机精准位置信息;
5、所述数据传输模块,用于将高度信息和无人机精准位置信息传输至无人机飞控系统,无人机飞控系统将高度信息和无人机精准位置信息转化成无人机偏移量,并根据无人机偏移量调整位置偏差,以使得无人机精准悬停至待降落无人机机巢中心,并降落无人机。
6、在本发明一实施例中,还包括一气象采集设备以对无人机降落过程进行优化,用于采集待降落无人机机巢上空包括风速、风力、风向和雨量等信息,并通过数据传输模块传输至无人机飞控系统。
7、在本发明一实施例中,该机巢系统能够基于双目相机传感器采集图像信息,判断待降落无人机机巢上空的光照强弱条件,在天气光线情况不好的时候,通过图像判断光照条件,开启待降落无人机机巢的灯光打在无人机上,以补偿光线来提升无人机机巢的视觉识别效果。
8、在本发明一实施例中,所述数据传输模块包括无线数据传输模块和数据传输天线。
9、本发明还提供了一种采用上述所述的一种基于双目视觉辅助无人机降落的机巢系统的基于双目视觉辅助无人机降落方法,包括如下步骤:
10、s1、无人机通过非视觉定位方式引导悬停至待降落无人机机巢上空,转换为视觉引导降落;
11、s2、通过双目相机传感器采集无人机悬停在待降落无人机机巢上方的图像信息,并根据采集图像信息判断是否需要控制开启待降落无人机机巢的灯光对图像信息识别进行光线补偿;
12、s3、通过双目相机传感器,利用视差原理获取悬停无人机当前距离待降落无人机机巢的高度信息;
13、s4、通过图像处理器对采集到的图像信息进行处理,获取特征图像;
14、s5、根据特征图像获取所述特征图像中的无人机在当前高度下的精准位置信息;
15、s6、通过数据传输模块将高度信息和精准位置信息传输至飞控系统;
16、s7、无人机飞控系统将高度信息和精准位置信息转化成无人机偏移量,并根据无人机偏移量调整位置偏差,从而使得无人机精准悬停至待降落无人机机巢中心;
17、s8、当无人机达到预定降落高度后,执行降落,关闭螺旋桨和其它动力装置。
18、在本发明一实施例中,所述步骤s2具体实现如下:
19、s21、双目相机传感器拍摄待降落无人机机巢上方图像信息;
20、s22、将s21获取到的图像转为单通道灰度图像;
21、s23、对s22获取到的灰度图像进行灰度直方图统计,并计算出图像平均像素值α;
22、s24、根据预先设定的阈值α’和计算出的图像平均像素值α进行比较;如果图像平均像素值α小于预先设定的阈值α’,即α<α’,则光照强度不足,开启待降落无人机机巢灯光;如果图像平均像素值α大于或等于预先设定的阈值α’,即α≥α’,则光照强度较好,不开启待降落无人机机巢灯光。
23、在本发明一实施例中,所述步骤s3具体实现如下:
24、s31、坐标系标定:建立相机坐标系和空间坐标系以及二者的转换矩阵,以待降落无人机机巢中心为空间坐标系原点,部署双目相机传感器于待降落无人机机巢中心,则二者坐标系一致,记待降落无人机机巢中心为cet_x,cet_y;
25、s32、坐标系标定完成后,利用视差原理确定悬停无人机当前距离待降落无人机机巢的高度信息;
26、s33、记h为无人机悬停位置距离双目相机传感器的高度,f表示双目相机传感器焦距,b表示双目相机传感器的基线长度,即左右摄像头之间的距离,d表示无人机在左右视图上的视差,即无人机在左右视图上的像素坐标之差;
27、s34、则无人机当前悬停高度为h=fb/d。
28、在本发明一实施例中,所述步骤s5具体实现如下:
29、s51、对双目相机传感器采集到的图像信息进行中值滤波降噪处理和二值化处理;
30、s52、对经过处理后的图像信息使用部署在图像处理器中的目标检测模型进行扫描检测得到当前悬停高度下的无人机中心位置坐标pix_x,pix_y,同时将检测到的无人机边缘的四个高亮光点标记为a、b、c、d;
31、s53、计算a、b、c、d四个光点的像素坐标位置和面积;
32、s54、根据ac与bd的连线交叉点计算出无人机的中心坐标pix_x1,pix_y2,用于辅助校正目标检测模型给出的无人机中心位置坐标pix_x,pix_y,同时计算出无人机所占的像素大小pixel_x,pixel_y。
33、在本发明一实施例中,所述步骤s7具体实现如下:
34、s71、记无人机当前悬停高度的ret_x等于当前无人机悬停高度h下的x轴偏移量,无人机当前悬停高度的ret_y等于当前无人机悬停高度h下的y轴偏移量;
35、s72、采用如下公式将像素偏移量转化为位移偏移量:
36、ret_x=(-0.00293875727162397f*pix_x+0.470201163459835f)/
37、(4.43013552642296e-6f*((pix_x-160.0f)*(pix_x-160.0f))+
38、4.79331390531725e-6f*((pix_y-100.0f)*(pix_y-100.0f))-1.0f)
39、ret_y=(-0.003056843086277f*pix_y+0.3056843086277f)/
40、(4.43013552642296e-6f*((pix_x-160.0f)*(pix_x-160.0f))+
41、4.79331390531725e-6f*((pix_y-100.0f)*(pix_y-100.0f))-1.0f)
42、s73、无人机当前悬停高度h*ret_x等于当前无人机高度下的x轴偏移量,无人机当前悬停高度h*ret_y等于当前无人机悬停高度下的y轴偏移量;
43、s74、无人机中心位置坐标为:pix_x、pix_y,偏移量为:ret_x和ret_y,f表示:浮点数,e表示:科学计数法。
44、相较于现有技术,本发明具有以下有益效果:本发明提供的无人机降落机巢辅助系统及降落方法,利用机巢辅助系统向上设置的标定后的双目相机传感器进行图像视频信息传输,根据双目相机的视差测距原理获取当前无人机与机巢之间的高度信息,利用目标检测模型对灰度化后的图像进行检测,获取当前高度下无人机在图片中的水平位置信息,同时根据图像信息计算出无人机像素中心位置用以辅助校正水平位置信息。计算无人机相对于机巢降落中心的偏移量并将其传递给无人机飞控系统,飞控系统在降落过程中根据偏移量实时调整位置偏差进而精准落入机巢。相对于rtk,gps定位具有更高的经济性和灵活性。相对于无人机机载图像识别定位,将复杂的图像处理功能从无人机中转移到机巢的嵌入式开发板中,从而减轻无人机计算机负载与成本。
- 还没有人留言评论。精彩留言会获得点赞!