可折叠无人飞行器的制作方法
本发明涉及无人飞行器的,更特别地涉及一种可折叠无人飞行器。
背景技术:
1、飞行器诸如无人飞行器(uav)已经被配置用于广泛应用。例如,uav已经用于消防和救援行动、空中摄影、监视、地理调查、电力线检查和农业用途。例如,uav已经在农场中用于执行各种任务,诸如喷洒流体,诸如水、肥料、杀虫剂等。当用于消防和救援行动时,uav也已经被用于喷洒灭火剂,以抑制野火。
2、当前在市场上可获得的无人飞行器通常包括偶数个臂,每个臂均安装有一推进组件,该推进组件可以包括马达和螺旋桨。例如,一些uav具有装备有四个、六个或八个推进组件的四个、六个或八个臂。这些臂和安装在其上的推进组件通常相对于uav的中央本体的轴线对称地分布。另外,臂和推进组件通常是等同的。例如,臂可以具有相同的长度。存在与臂的等同配置相关联的一些问题。例如,当uav用于将流体喷洒到农业田地时,喷洒喷嘴通常设置在推进组件下方,例如在螺旋桨下方。螺旋桨产生的向下的风场产生向下的压力,从而产生向下的抑制力。向下的抑制力有助于使喷洒的流体液滴朝向田地向下移动。然而,由具有等同的臂和推进组件的当前可获得的uav产生的风场(并且因此向下的抑制力)通常是弱的,使得流体液滴易于被侧风吹走。因此,压制喷洒的流体液滴的能力通常不足。此外,市场上可获得的用于农业用途的大多数uav都是不可折叠的。这些uav的大小庞大,这使得运输和存储不便。
3、因此,需要开发一种可折叠的uav,其可以提供改进的喷洒效果以及更强的压制压力,以帮助喷洒的流体液滴向下移动。
技术实现思路
1、本公开的实施例提供一种折叠无人飞行器的方法,所述无人飞行器包括从所述无人飞行器的中央本体径向地延伸的多个臂。所述方法包括竖向地折叠第一组所述臂。所述方法还包括水平地折叠第二组所述臂。
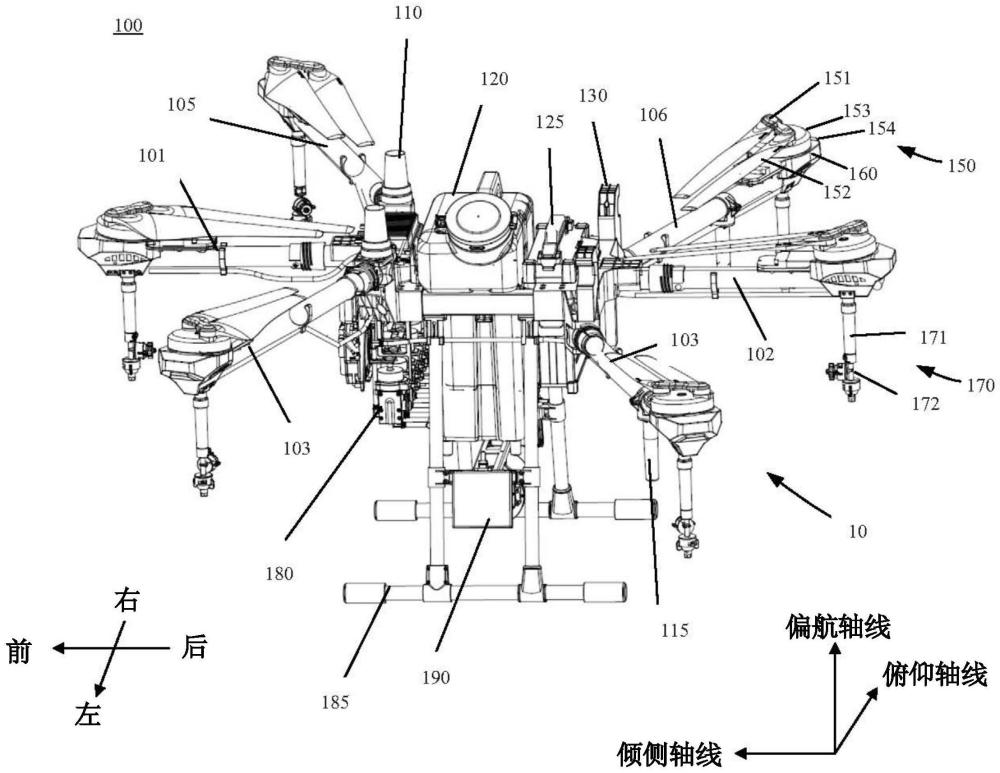
2、本公开的实施例提供一种无人飞行器。所述无人飞行器包括中央本体和耦接到所述中央本体的多个臂。分别耦接到所述中央本体的前侧和后侧的两个臂的长度比所述臂中分别耦接到所述中央本体的左侧和右侧的其余臂的长度更短。
3、本公开的实施例提供一种无人飞行器。所述无人飞行器包括具有多个侧的中央本体。所述无人飞行器还包括能够从所述中央本体展开的多个臂。每个臂被配置成支撑在所述无人飞行器飞行时提供推进力的一个或更多个推进组件。所述臂被配置成在所述臂远离所述中央本体展开的飞行形态与第一组所述臂的自由端共同限定矩形区域的紧凑形态之间转换。第二组所述臂的自由端比第一组所述臂的自由端更靠近所述无人飞行器的偏航轴线。偏航轴线穿过所述矩形区域。
4、本公开的实施例提供一种无人飞行器。所述无人飞行器包括中央本体。所述无人飞行器还包括被可拆卸地耦接到所述中央本体的中心部分的流体箱。所述无人飞行器还包括被可拆卸地耦接到所述中央本体的后部部分的电源。所述无人飞行器在所述流体箱和所述电源从所述中央本体拆卸时的第一重心至少与所述无人飞行器在所述流体箱和所述电源安装在所述中央本体上时的第二重心在同一竖向轴线上。
5、本公开的实施例提供一种无人飞行器。所述无人飞行器包括中央本体。所述无人飞行器还包括被可拆卸地耦接到所述中央本体的中心部分的流体箱。所述流体箱包括在所述流体箱的外壁上的第一位置限制凹槽。所述无人飞行器还包括被可拆卸地耦接到所述中央本体的后部部分的电源。所述电源包括在所述电源的外壁上的第二位置限制凹槽。所述无人飞行器还包括被设置在所述中央本体的中心部分上的第一突出部,所述第一突出部被配置成能够与所述流体箱的位置限制凹槽接合,以在所述流体箱插入所述中央本体的中心部分处的空间中时限制所述流体箱的位置。所述无人飞行器还包括被设置在所述中央本体的后部部分的第二突出部,所述第二突出部被配置成能够与所述电源的位置限制凹槽接合,以在所述电源插入所述中央本体的后部部分处的空间中时限制所述电源的位置。
6、本公开的实施例提供一种无人飞行器。所述无人飞行器包括中央本体和耦接到所述中央本体的多个臂。所述多个臂包括分别耦接到所述中央本体的前侧和后侧的第一臂和第二臂,所述第一臂和所述第二臂能够从径向展开位置朝向所述中央本体的下部部分被竖向地折叠。所述多个臂还包括分别耦接到所述中央本体的左前侧和左后侧的第三臂和第四臂,所述第三臂和所述第四臂能够从所述第三臂和所述第四臂从所述中央本体径向地延伸的位置被折叠到所述第三臂和所述第四臂被设置成邻近所述中央本体并且在与连接所述第一臂和所述第二臂的轴线基本上平行的方向上延伸的位置。所述多个臂还包括分别耦接到所述中央本体的右前侧和右后侧的第五臂和第六臂,所述第五臂和所述第六臂能够从所述第五臂和所述第六臂从所述中央本体径向地延伸的位置被折叠到所述第五臂和所述第六臂被设置成邻近所述中央本体并且在与连接所述第一臂和所述第二臂的轴线基本上平行的方向上延伸的位置。
7、本公开的实施例提供一种无人飞行器。所述无人飞行器包括中央本体和耦接到所述中央本体的多个臂。所述多个臂包括分别连接到所述中央本体的前侧和后侧的第一臂和第二臂,所述第一臂具有第一长度,并且所述第二臂具有第二长度。所述多个臂包括分别耦接到所述中央本体的左前侧和左后侧的第三臂和第四臂,所述第三臂具有第三长度,并且所述第四臂具有第四长度。所述多个臂包括分别耦接到所述中央本体的右前侧和右后侧的第五臂和第六臂,所述第五臂具有第五长度,并且所述第六臂具有第六长度。所述第一臂在第一臂安装高度处被安装到所述中央本体,所述第二臂在第二臂安装高度处被安装到所述中央本体,所述第三臂在第三臂安装高度处被安装到所述中央本体,所述第四臂在第四臂安装高度处被安装到所述中央本体,所述第五臂在第五臂安装高度处被安装到所述中央本体,并且所述第六臂在第六臂安装高度处被安装到所述中央本体。所述第一臂安装高度、所述第三臂安装高度和所述第五臂安装高度中的每个臂安装高度比所述第二臂安装高度、所述第四臂安装高度和所述第六臂安装高度中的每个臂安装高度更高。
8、本公开的实施例提供一种无人飞行器。所述无人飞行器包括具有多个侧的中央本体。所述无人飞行器还包括能够从所述中央本体展开的多个臂。每个臂被配置成支撑在所述无人飞行器飞行时提供推进力的一个或更多个推进组件。所述臂被配置成在所述臂远离所述中央本体展开的飞行形态与第一组所述臂朝向所述中央本体的对应侧被折叠并且第二组所述臂朝向所述中央本体的下部部分被折叠的紧凑形态之间转换。
9、本公开的实施例提供一种无人飞行器。所述无人飞行器包括中央本体和能够从所述中央本体展开的多个臂。所述臂被配置成支撑在所述无人飞行器飞行时提供推进力的一个或更多个推进组件。第一组所述臂耦接到所述中央本体的头部部分,所述多个第二组臂耦接到所述中央本体的尾部部分。每组所述臂包括三个臂,所述三个臂包括中间臂和位于所述中间臂的两侧上的两个侧臂。所述中间臂的长度比所述两个侧臂的长度更短。
10、本公开的实施例提供一种无人飞行器。所述无人飞行器包括中央本体和能够从所述中央本体展开的多个臂。第一组所述臂能够被竖向地折叠,并且第二组所述臂能够被水平地折叠。
11、本公开的实施例提供了具有六个臂的uav。在一些实施例中,六个臂中的两个臂比六个臂中的其余四个臂更短。较短的两个臂耦接到uav的前侧和后侧,其中前侧是设置飞行控制板的侧,而后侧是与前侧相反的侧。在一些实施例中,当臂的尖端部分被虚拟地连接并且从uav的中央本体的顶部上方观察时,所述尖端部分形成非正六边形。在一些实施例中,非正六边形的与前臂和后臂的尖端部分对应的内角大于120°,并且非正六边形的与耦接到uav的左侧和右侧的臂的尖端部分对应的内角小于120°。所公开的臂和推进组件的配置产生基本上矩形的风场,这改善了喷洒范围。所公开的uav可以提高农业喷洒的效率。与市场上可获得的其他uav相比,效率可以提高40%至100%。另外,电池和流体箱被可拆卸地安装到uav的中央本体。电池和箱可以相对较快地从uav拆卸,以进行维修、更换、再填充等。电池和流体箱的模块化设计还提高了操作安全性和效率。
12、应当理解,可以单独地、共同地或彼此结合地理解本公开的不同方面。本文描述的本公开的各个方面可以应用至以下阐述的特定应用中的任一特定应用或应用至任何其他类型的可移动物体。本文对飞行器(诸如无人飞行器)的任何描述可以应用至并且用于任何可移动物体(诸如任何交通工具)。另外,本文在空中运动(例如飞行)的背景下公开的系统、装置和方法也可以在其他类型的运动诸如地面上或水上的移动、水下运动或太空中的运动的背景下应用。
13、通过阅读说明书、权利要求书和附图,将明白本公开的其他目的和特征。
- 还没有人留言评论。精彩留言会获得点赞!