一种框架倾角可调的控制力矩陀螺群及其装置
本发明涉及卫星执行机构,具体涉及一种能够验证不同倾角对陀螺群输出特性影响的框架倾角可调的控制力矩陀螺群及其装置。
背景技术:
1、控制力矩陀螺作为航天执行机构,与反作用轮改变转子角动量大小提供输出力矩的方式有所不同,控制力矩陀螺通过改变转子角动量的方向提供输出力矩。控制力矩陀螺具有以下特性:一是具有力矩放大能力,能够达到大力矩输出的目的;二是线性度优良,易于获得良好的姿态控制性能;三是不损耗工质,无羽流污染。由于以上优点,使得控制力矩陀螺在卫星姿态控制领域备受关注,目前应用最广的为单框架控制力矩陀螺。
2、单框架控制力矩陀螺只具有提供一个自由度的力矩输出能力,要实现卫星的三轴姿态控制,需要多只单框架控制力矩陀螺通过合理的构型,构成冗余的控制力矩陀螺群,其典型构型为金字塔构型的单框架控制力矩陀螺群。以金字塔构型的单框架控制力矩陀螺群为例,为获得对称形的动量体和包络面,令其沿三轴的角动量相等,由此可得框架倾角为53.1°。大多数金字塔构型的单框架控制陀螺群实物也采用固定构型,即保持框架倾角为53.1°且框架倾角无法改变。
3、单框架控制力矩陀螺群的缺点是容易陷入奇异状态。单框架控制力矩陀螺群通过框架角改变转子角动量方向的过程中,在某种框架角配置的情况下,每个单框架控制力矩陀螺所能提供的力矩均正交于期望的控制力矩,即该框架角配置状态下各个单框架控制力矩陀螺的角动量在期望力矩方向上达到极值,无法通过改变角动量方向来产生该方向的力矩,从而使得陀螺群陷入奇异状态。
4、在对陀螺群操纵律的研究上,一些控制律可以在一定程度上避免奇异,如奇异鲁棒操纵律、伪逆操纵律等,但这些操纵律要么回避奇异性的能力不高,要么会产生力矩误差。这些操纵律均以固定构型(即框架倾角不变)为研究对象,只能通过改变框架角单自由度实现奇异回避,而没有将框架倾角作为可控变量引入操纵律的设计中,无法实现多自由度奇异回避。同时,固定构型的陀螺群虽然能够获得对称的动量体包络,能满足三轴均匀的控制能力需求,但实际情况是大多数在轨航天器敏捷机动的过程中往往对某个轴具有较高的机动要求,对另外两轴的机动要求可以适当放宽。只有极少部分研究陀螺群操纵律中引入了框架倾角这一控制变量,但是却缺乏可变构型控制力矩陀螺群实物实验数据支撑。
技术实现思路
1、针对上述缺陷,本发明的目的在于提供一种面向微小卫星的框架倾角可调的控制力矩陀螺群及其装置,扁平直流无刷电机带动转子旋转产生角动量。框架电机带动内框架旋转,使得转子角动量改变,产生输出力矩。同时单框架控制力矩陀螺外框架和陀螺支架可以相对转动,以此来手动调节框架倾角的大小。本发明是对固定构型的控制力矩陀螺装置的一种改进,可以作为地面验证实验装置来验证不同倾角对陀螺群输出特性影响,同时结构紧凑,获得了更加优秀的使用性能。
2、本发明解决其技术问题所采用的技术方案是:
3、一种框架倾角可调的控制力矩陀螺群,包括若干相同的单框架控制力矩陀螺,所述单框架控制力矩陀螺固定设于陀螺支架上;所述单框架控制力矩陀螺包括外框架装置,内框架装置和框架电机系统。所述外框架装置和框架电机系统通过框架电机支座安装固定;所述外框架装置与陀螺支架采用螺栓螺母的方式连接,可通过调节螺栓螺母改变框架倾角;所述外框架装置包括“l”字形框架,外框架轴承短板,2个轴承,其中一个设于“l”字形框架内,另一个设于外框架轴承短板内;所述“l”字形框架的两边相交位置处设有凸出部分,用于与陀螺支架相连;所述框架电机系统包括依次相连的编码器、框架电机、法兰、减速器、和框架电机支座,所述减速器和框架电机支座采用螺钉连接,编码器、框架电机、法兰和减速器同轴固定连接;所述框架电机支座与“l”字形框架固定相连;内框架装置包括“中”字形框架、转子电机、转子和导电滑环,转子与转子电机相连构成转子系统,转子系统嵌入于“中”字形框架中,随“中”字形框架旋转;导电滑环设于“中”字形框架内,用于防止旋转过程中转子电机导线的缠绕。所述外框架装置和内框架装置通过轴承固定连接。
4、上述技术方案中,进一步地,所述内框架装置中转子与转子电机轴通过过盈方式连接,同时采取“点胶”方式进行加固。转子电机选用扁平直流无刷电机,扁平直流无刷电机可以直接内嵌在“中”字形框架里,“中”字形框架上有四个螺纹孔,扁平直流无刷电机可以与“中”字形框架通过螺钉方式紧固连接。
5、进一步地,内框架装置中的“中”字形框架两端为轴,其中与l型框架相连的为轴一,另一为轴二,轴一为三段阶梯轴,轴二为两端阶梯轴。轴二阶梯轴打通,与导电滑环采用过盈安装的方式安装并固定。轴一阶梯轴根据框架电机轴的形状进行打孔处理,并与框架电机轴固定连接。
6、进一步地,在“中”字形框架上进行切槽得到凹槽,转子电机的导线安装于凹槽处,顺着凹槽即可进入轴二的通孔与导电滑环连接。
7、进一步地,所述外框架装置中,对“l”字形框架两边进行了挖槽处理,以减轻装置重量。
8、进一步地,在与框架电机支座相连的“l”字形框架的一边上进行螺纹钻孔,并采用螺钉连接固定框架电机支座与“l”字形框架。
9、进一步地,分别在“l”字形框架和外框架轴承短板上进行挖孔用于轴承安装,保留一定壁厚用于对轴承的固定。轴承进行安装定位后便可与内框架装置中的“中”字形框架两端的轴进行连接,以此实现外框架装置和内框架装置的固定连接。在保证框架电机轴线,两个轴承轴线和内框架“中”字形框架轴线共线的情况下,通过螺钉拧紧“l”字形框架和外框架轴承短板。
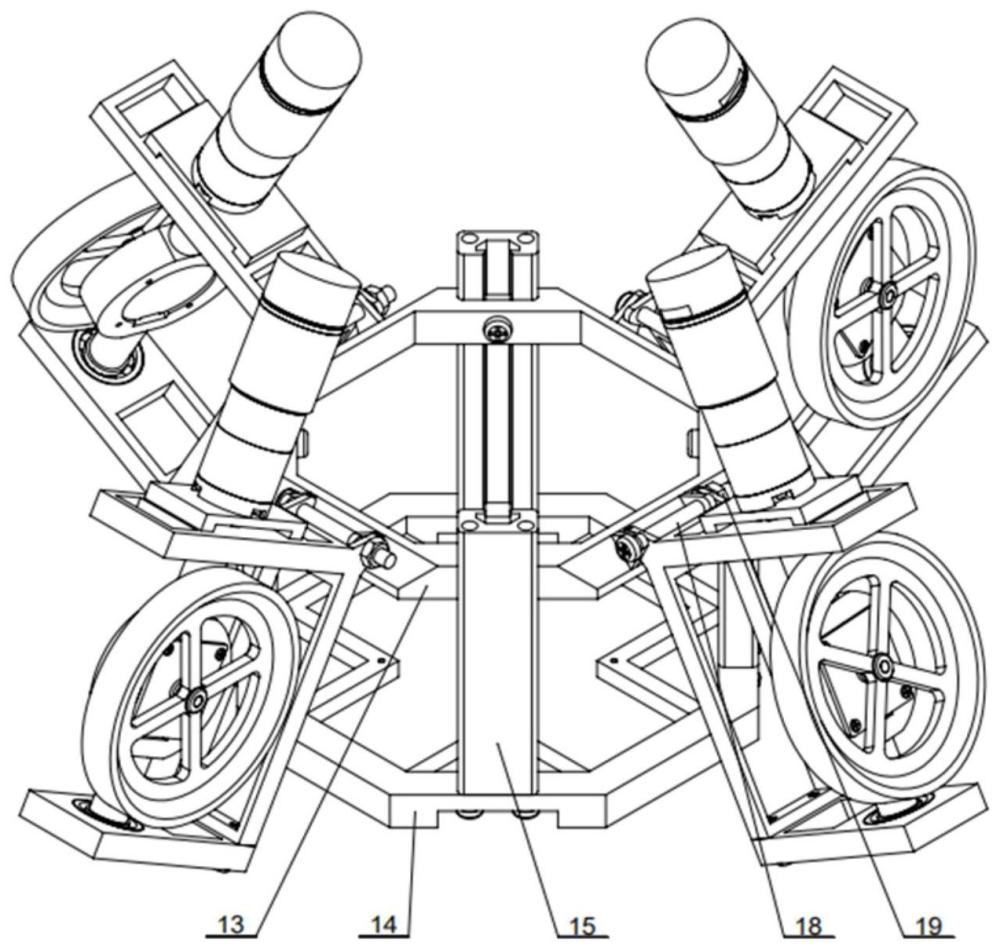
10、本发明还提供一种框架倾角可调的控制力矩陀螺装置,包括:可升降导轨,底座,陀螺支架,以及上述的框架倾角可调的控制力矩陀螺群;所述可升降导轨垂直设于所述底座上,所述陀螺支架与所述可升降导轨固定连接。
11、进一步地,所述单框架控制力矩陀螺分别与陀螺支架采用螺栓螺母的方式固定连接;所述底座与升降导轨通过螺钉连接;所述陀螺支架与可升降导轨通过t形螺栓和螺母固定连接;所述单框架控制力矩陀螺和陀螺支架通过螺栓和螺母固定连接;通过调节单框架控制力矩陀螺和陀螺支架处的螺栓螺母改变单框架控制力矩陀螺的安装倾角,同时调节升降导轨和陀螺支架处的t形螺栓螺母改变单框架控制力矩陀螺的高度,使得单框架控制力矩陀螺的外框架装置固定于底座的水平面上。
12、进一步地,当所述控制力矩陀螺群中单框架控制力矩陀螺个数为4个时,所述陀螺装置构成金字塔构型,所述底座为正八边形框架,若俯视底座,定义底座的最上边沿为“上边”,则定义底座的最下边沿为“下边”,定义底座的最左边沿为“左边”,定义底座的最右边沿为“右边”,则其余四条边沿可以分别定义为“右上边”,“右下边”,“左下边”,“左上边”。在八边形底座的“右上边”,“右下边”,“左下边”,“左上边”的底部存在长方形槽,长方型槽上有螺纹孔。
13、进一步地,可升降导轨选用欧标1020工业型材,将四个长度一致的欧标1020工业型材分别垂直安装于八边形底座的“右上边”,“右下边”,“左下边”,“左上边”的顶面,使用螺钉从长方形槽下面拧紧,使底座和可升降导轨固定。
14、进一步地,陀螺支架同样采用正八边形框架,若俯视陀螺支架,定义陀螺支架的最上边沿为“上边”,则定义陀螺支架的最下边沿为“下边”,定义陀螺支架的最左边沿为“左边”,定义陀螺支架的最右边沿为“右边”,则其余四条边沿可以分别定义为“右上边”,“右下边”,“左下边”,“左上边”。在陀螺支架的“右上边”,“右下边”,“左下边”,“左上边”的侧面存在长方形槽,长方型槽上有螺纹孔。可升降导轨可嵌入至长方形槽中,陀螺支架和可升降导轨采用t型螺母和螺栓的方式紧固连接。
15、进一步地,陀螺支架的“上边”“下边”“左边”“右边”和单框架控制力矩陀螺的外框架处均有凸出部分,以用于螺栓连接。四个单框架控制力矩陀螺可分别安装于陀螺支架的凸出部分。
16、本发明的优点在于:
17、结构简单,零件个数少,安装方便,同时具有体积小,重量轻的特点,适用于微小卫星姿态执行机构的地面实验验证。
18、不同于构型固定的金字塔构型控制力矩陀螺群,该装置可以通过调节陀螺支架和单框架控制力矩陀螺的螺栓螺母来改变框架倾角,验证不同框架倾角下对控制力矩陀螺群的输出特性的影响,为引入框架倾角控制变量的多变量操纵律提供实物支持和数据支撑。基于本发明装置不仅可以验证陀螺群输出力矩情况,还可以研究框架倾角对陀螺群力矩输出特性和角动量包络情况的影响,通过框架角对陀螺群输出特性的影响,为以后更好的提供避免奇异策略提供依据。
- 还没有人留言评论。精彩留言会获得点赞!