一种宽速域飞行器用钳形机翼
本发明涉及变体飞行器领域,具体涉及一种宽速域飞行器用钳形机翼。
背景技术:
1、变体飞行器的概念于20世纪初由美国首次提出,变体飞行器在飞行中可改变气动外形,使飞行器在全包线范围内均可收获良好的气动性能,可提高飞行器飞行速度范围、使飞行器具备宽速域飞行能力。时至今日,世界范围内围绕变体飞行器的研究始终备受关注和重视。随着技术水平的提高和研究经验的不断积累,已有多种形式的变体方法被应用于各类飞行器,进一步提高了飞行器的飞行性能,拓展了飞行器的飞行速度范围。
2、现有变体方式主要包括:伸缩翼、变后掠翼、折叠翼和变翼型。
3、伸缩翼将一部分机翼收入主机翼内,通过该部分机翼沿展向或弦向的伸缩改变机翼面积以满足不同飞行速度要求,又可分为两段式伸缩翼及多段式伸缩翼,这类变体主要通过由伺服电机、弹簧、伸缩导轨等结构组成的伸缩机构实现。
4、变后掠翼通过变后掠机构,使机翼围绕布置于翼根附近的竖直转轴转动,从而改变机翼的后掠角,使飞行器适应不同飞行条件,平衡高速与低速飞行之间的性能需求。变后掠飞行器一般在起降及低速飞行阶段采用零后掠角或较小后掠角以提供充足升力,高速飞行时增大机翼后掠角以降低飞行阻力、提高巡航性能。
5、折叠翼飞行器的机翼在飞行中可通过折叠改变有效机翼面积,适应不同飞行速度。飞行器低速飞行时将机翼展开以获得较大机翼面积,高速飞行时将机翼折叠以减小有效翼面积。这类飞行器涉及折叠机构的可靠性、飞行稳定性等多个问题,尚未得到广泛应用。
6、基于柔性蒙皮技术的发展,变翼型飞行器应运而生。变翼型飞行器可对实际飞行情况作出实时响应,及时调整机翼翼型,从而达到优化飞行器性能的效果,实现提高飞行器航程、拓宽飞行器速域、提高飞行器机动性等多种目标。
7、当前随着无人飞行器的进一步发展,其对变体形式及变体机构提出更高要求。无人飞行器的小型化趋势提出变体形式简单、变体机构紧凑可靠的要求;功能多样化趋势则要求飞行器飞行速度范围进一步扩大。
8、现有技术提出了以下解决方案:公告号为cn216887196u的中国实用新型专利提出了一种新型的飞机机翼变体机构,通过作动器驱动变体机构可同时改变机翼后掠角、展弦比与翼面积。该方案变体形式与机构均较为简单,但转轴结构薄弱,机构可靠性较差,对柔性蒙皮力学性能依赖性较高,且该方案会导致变体过程中全机重心大幅度移动。
9、公开号为cn114872881a的中国发明专利申请提出了一种大行程伸缩机翼无人机及机翼伸缩机构,该发明可实现机翼的大行程快速伸缩,结构稳定可靠,伸缩机翼可使无人机适应多飞行状态。但该发明中的伸缩机构对于机翼的尺寸有一定要求,难以应用于小尺寸机翼,且会带来由展弦比过大引起的机翼气弹问题。
10、公告号为cn103979104b的中国发明专利提出了一种可改变机翼夹角的垂直起降尾座式变体微型飞行器及变体机构。该飞行器具有垂直起降、平飞与悬停能力,为有上下两对机翼的x型机翼布局,通过改变机翼夹角满足不同飞行状态要求,其变体机构紧凑可靠,具有小尺寸、轻量化特征。但该飞行器飞行速度范围较小,仅能进行低速飞行,不具备宽速域飞行能力。
11、以上技术方案在适用于小型飞行器的变体形式与变体机构方面进行了研究,但是仍存在飞行器飞行速度范围较小、小尺寸变体机构强度不足、可实现性较低的问题,难以实现小型飞行器的可靠变体与宽速域飞行。
技术实现思路
1、鉴于上述问题,本发明提供了一种宽速域飞行器及其钳形机翼,解决了现有技术中小尺寸变体飞行器变体机构强度不足、可实现性不强的技术问题。
2、第一方面,本发明提供了一种宽速域飞行器用钳形机翼,包括:
3、上机翼、下机翼、作动器、传动装置、机翼联动装置、轨道保持装置、锁死装置;
4、作动器与传动装置连接,传动装置分别与上机翼、下机翼连接,作动器通过传动装置分别驱动上机翼、下机翼以机身为轴线旋转;
5、上机翼为镜像对称的第一机翼、第三机翼;下机翼为镜像对称的第二机翼、第四机翼;
6、机翼联动装置与传动装置连接,使第一机翼和第三机翼旋转角度一致、第二机翼和第四机翼旋转角度一致;
7、轨道保持装置分别与上机翼、下机翼连接,限制上机翼、下机翼的旋转路径;
8、锁死装置分别与上机翼、下机翼连接,对上机翼、下机翼完成旋转后的位置进行锁定。
9、优选地,所述上机翼、下机翼的根梢比和后掠角相同;所述上机翼、下机翼均采用可分解/合并的翼型设计,可完全贴合,使得上下机翼旋转角为0度时,上下翼可合并为一整体机翼。
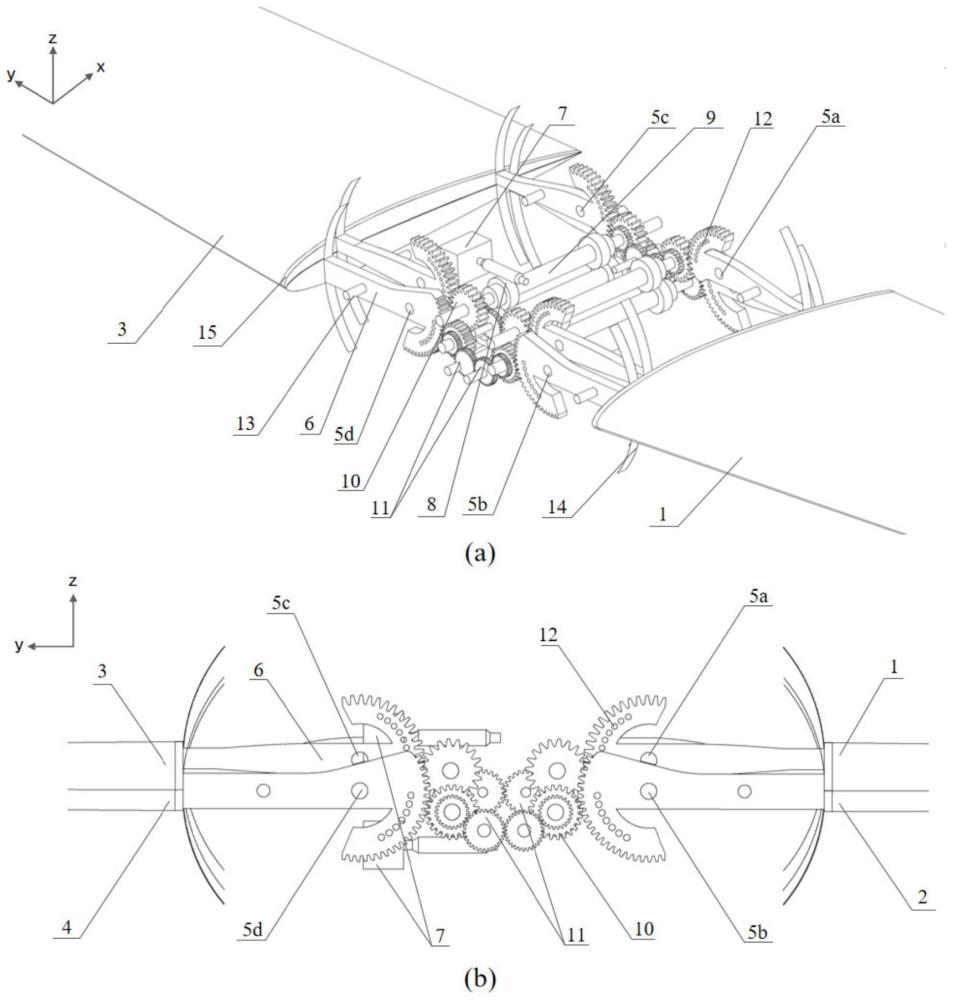
10、优选地,所述传动装置包括四个固定有传动齿轮10的传动轴9,上机翼、下机翼均包括翼梁6;所述四个传动齿轮10分别与第一机翼、第二机翼、第三机翼、第四机翼的翼梁6末端相配合;第一机翼1、第二机翼2、第三机翼3、第四机翼4的翼梁6分别铰接于固定在飞行器机身的第一转轴5a、第二转轴5b、第三转轴5c及第四转轴5d;所述作动器7为两个伺服电机,所述两个伺服电机分别与两个蜗杆蜗轮机构8连接,所述两个蜗杆蜗轮机构8分别驱动与第一机翼、第二机翼的翼梁6末端相配合的传动齿轮所在的传动轴转动。
11、优选地,所述机翼联动装置11包括联动轴与固定在联动轴上的联动齿轮,所述联动齿轮与所述四个传动齿轮10相配合,使第一机翼和第三机翼旋转角度一致、第二机翼和第四机翼旋转角度一致。
12、优选地,机身隔框19位于所述上机翼、下机翼与机身连接处,所述轨道保持装置包括所述机身隔框19上开设的轨道槽18,翼梁6上设有轨道滑块13,所述轨道滑块13在所述轨道槽18内运动。
13、优选地,所述锁死装置包括位置锁定舵机16与锁定销17,在翼梁6末端开设有圆形位置锁定孔12,位置锁定舵机16固定于机身隔框19,与锁定销17连接;位置锁定舵机16驱动锁定销17插入位置锁定孔12完成机翼位置的锁死。
14、优选地,还包括固接环形整流壳14,所述固接环形整流壳14位于机翼与机身连接处,与翼梁6固定连接,用于保持机身气动外形的完整性。
15、第二方面,本发明提供了一种具有钳形机翼的宽速域飞行器,包括:机身20、机身轨道槽22、水平尾翼23及垂直尾翼24,第一机翼1与第三机翼3、第二机翼2与第四机翼4关于体轴系xoz平面镜面对称;
16、第一机翼1、第三机翼3的运动范围为0度至40度上反角,第二机翼2、第四机翼4的运动范围为0度至40度下反角。
17、优选地,机身20为沿体轴系x轴的细长旋成体,采用桁梁式半硬壳结构;
18、机身20与机翼连接处开设有四个机身轨道槽,以便机翼进行旋转;
19、机身20后与水平尾翼23、垂直尾翼24连接处开设有安装接口。
20、优选地,第一机翼、第二机翼、第三机翼、第四机翼、水平尾翼23及垂直尾翼24内部均设有翼梁及翼肋,均在翼根处布置加强翼肋;
21、水平尾翼23及垂直尾翼24通过机身加强隔框与机身20相连。
22、与现有技术相比,本发明至少具有如下有益效果:
23、(1)本发明提供的宽速域飞行器用钳形机翼,其上下机翼具备分解、合并功能,使飞行器具备在x型构型与常规构型间转换的变构型能力;在x型构型状态下,机翼还可通过改变上下翼夹角进一步改变升力系数及有效机翼面积,使飞行器满足不同飞行速度的气动要求;该钳形机翼可有效提升飞行器在低速飞行时的失速性能与巡航性能,且其上下翼合并功能可进一步提高飞行器飞行速度上限,进而扩大飞行速度范围;
24、(2)本发明提供的钳形机翼变体实现机构为单向动力机构,可保证机翼完成旋转后位置自动锁定,防止翼面受到的气动力、惯性力等外力导致机翼发生位移并对机构与作动器造成不利影响;
25、(3)本发明提供的钳形机翼变体形式简单,变体过程不会导致重心位置明显移动且实现机构紧凑,传动精确,可确保左右机翼变体具备对称性,作动器数量少,通过简单调整可满足不同变体策略要求,适用范围广。
- 还没有人留言评论。精彩留言会获得点赞!