本发明涉及一种基于高力效和高推进效率引擎的分布式hsvtol飞行器,属于飞行器整机构型设计领域。
背景技术:
1、载重能力强的垂直起降高速飞行器(high speed vertical takeoff andlanding,hsvtol)具有“快速支持、敏捷打击”的能力,可以很好地满足我军未来的作战需要。
2、为了实现大载重能力的垂直起降,需要依托力效大的升力系统,实用新型授权专利公布号为cn 219056579 u的专利,提出一种双发串联垂直起降飞机,一台位于战机前部,另一台位于战机后部,使发动机性能得到了更加充分的发挥和提升,垂直起降和巡航都是双发一起工作,但该战机垂起存在力效(约为0.4g/w)低,喷管喷气产生热损大的问题,耗油率大,该设计对标的f35战机所采用的升力风扇力效仅仅为0.4g/w,远远低于直径14.65m转速242rpm的ah-64直升机旋翼4.1g/w的力效,不利于飞行器的最大能力运载,这从一侧面反映大载重能力的垂直起降需要依托力效大转速低的旋翼作为升力系统。
3、不妨使用相似原理来等效ah-64直升机的旋翼系统,将旋翼尺寸缩小到原来的23倍,根据欧拉数,雷诺数以及马赫数相等的原则,等效后的小旋翼系统的转速需要达到6670rpm才能拥有和ah-64旋翼一样的气动力学特征,即力效为4.1g/w。这是一个很奇妙的现象,如果使用相似原理设计出多台同等力效的小推力级的系统,去代替一台ah-64旋翼,使得这两个飞行器具有一样的强载重能力。
4、类似的,利用相似原理去设计多台推进系统,去等效一台马赫数为0.5~0.8和推进效率为85%~95%的高性能螺旋桨或桨扇,使其具有其优异的气动性能。
5、基于这项新的推进技术,使得小推力级也能达到85%~95%的效率,如果你意识到,在所需总功率相同的情况下,使用24台小型电机比使用一台大型电机轻4.7倍;如果你认识到,通过使用许多小型电机,使热冷却成为简单的被动解决方案,而不需要复杂的主动液体冷却系统来为一台大型电机散热;你将如何利用推进系统能力的变化设计一架飞机?
6、发明专利公布号为cn 110901890 a的专利,提出一种旋翼可分类设计的高速旋翼飞行器,应用于高效垂直起降和高效高速前飞,旋翼分为升力桨和螺旋桨两类,升力桨用于垂直起降和悬停低速飞行,螺旋桨主要用于前飞,升力桨可按悬停与垂直起降气动效率最高来设计,12个旋翼安装在两列可倾转水平的机翼上,机翼随着旋翼整体倾转以适应垂起和巡航两种模式,并在巡航时关闭折叠升力桨来减少流动阻力。发明专利公布号为cn115867486 a的专利,提出垂直起降飞行器,它的机翼前缘安装多个倾转旋翼,机翼后缘安装多个升力旋翼,垂起模式下,前缘的多个倾转旋翼倾转到竖直向上,全部推进器用于产生升力;巡航模式下,升力旋翼被锁定在最小推力情况下以降低巡航阻力。这两项技术不足的地方是巡航时存在死重,导致的原因是垂起比巡航需要更多的旋翼来产生升力克服机身重量,因为巡航时候的推重比(飞机推进力和重力之比)一般小于1;旋翼个数和翼面设计上也没有深入挖掘其潜力,推进器的增加必然导致翼展的增加从而占用空间,以及对相似原理缺乏本质的认识,使得垂起过程需要更大的耗能。
技术实现思路
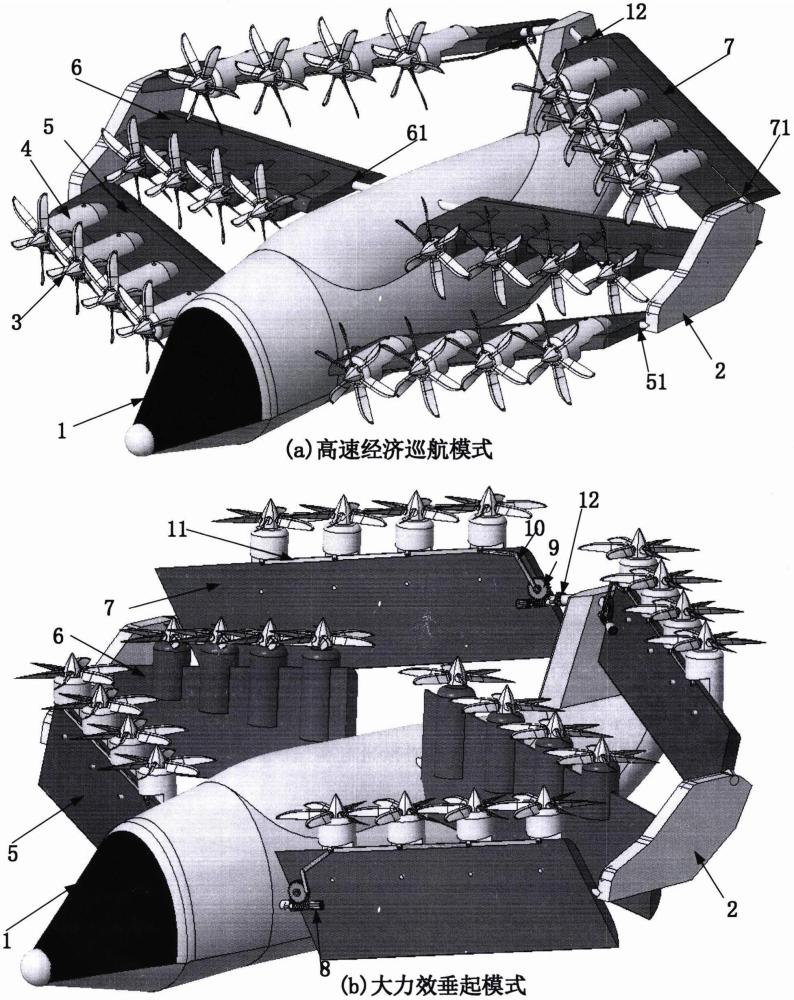
1、本发明的目的在于提供一种基于高力效-高推进效率引擎的分布式hsvtol飞行器,旨在发展一款基于小推力级的大力效垂直起降和高速经济巡航飞行器,采用纵向空间上相互错开的多桨倾转三翼面布局,并且多个高效率小推力级螺旋桨代替大型推进器,具有轻质量-低噪声-散热系统简单的优势,可实现大力效垂起和高速经济巡航,并提出蜗轮蜗杆机构和曲柄连杆机构,使飞行器具有悬停偏航的能力,并解决了斜翼面倾转过程存在螺旋桨方向无法保持和飞行方向一致的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种基于高力效和高推进效率引擎的分布式hsvtol飞行器,包括:机身、三翼支架、螺旋桨、驱动系统、倾转前翼、倾转中翼、倾转后翼、倾转电机、蜗轮蜗杆机构、曲柄连杆机构以及机翼倾转机构,所述三翼支架为左右一对,包含翼端小翼和三翼旋杆,所述翼端小翼起到防止叶尖涡产生和支撑倾转机翼的作用,所述三翼旋杆包含前翼斜杆、中翼直杆、后翼斜杆,所述前翼斜杆一端接在机身的前端底部,另一端接在翼端小翼前部,并构成一个空间斜角,所述中翼直杆一端接在机身的中部,另一端接在翼端小翼中部,并与垂直尾翼垂直,所述后翼斜杆一端接在垂直尾翼,另一端接在翼端小翼后部,并构成一个空间斜角,所述三翼旋杆分别穿过倾转前翼的前倾转翼孔、倾转中翼的中倾转翼孔和倾转后翼的后倾转翼孔,所述前倾转翼孔与倾转前翼端面成θ1角,且θ1∈(90°,140°),所述后倾转翼孔与倾转后翼端面成θ2角,且θ2∈(40°,90°);
4、所述倾转电机驱动端与蜗杆一端固连,所述蜗杆另一端与倾转驱动齿固连,所述三翼支架上安装有倾转啮合齿,所述倾转电机驱动倾转驱动齿围绕着倾转啮合齿旋转,从而实现三个机翼的倾转;
5、所述驱动系统的尾部设有旋转铰点,其中部安装有连杆铰点,所述蜗轮蜗杆机构的蜗轮和曲柄连杆机构的曲柄固连,曲柄连杆机构的连杆和电机从动连杆在驱动系统的连杆铰点处铰点连接,所述倾转电机驱动蜗轮旋转,驱动曲柄连杆机构运动,并通过电机从动连杆,将力和位移传递到每个驱动系统,最终使得多台安装在驱动电机上的螺旋桨连动调节,并始终保持螺旋桨推力和飞行方向一致;
6、所述倾转电机为机翼倾转和螺旋桨方向调节的连动动力源,所述倾转啮合齿和倾转驱动齿的齿数比∈[2,20],所述蜗轮蜗杆机构传动比∈[10,40],所述曲柄连杆机构的曲柄旋转角∈[30°,80°],以保证机翼倾转结束时螺旋桨方向跟飞行方向一致,所述飞行方向包括巡航水平前进方向和垂起竖直方向;
7、所述倾转电机在竖直方向上小幅度旋转±2~10度,改变螺旋桨的倾斜度,从而产生飞行器在悬停期间产生的偏航力,所述偏航力的控制方法为:从飞行员视角来看,控制倾转前翼右侧的倾转电机旋转2~10度,使得倾转前翼右侧的螺旋桨产生斜向外的推进力,该力的水平方向分力使飞行器产生绕重心顺时针旋转的偏航力;从飞行员视角来看,控制倾转后翼右侧的倾转电机旋转2~10度,使得倾转后翼右侧的螺旋桨产生斜向内的推进力,该力的水平方向分力使飞行器产生绕重心顺时针旋转的偏航力;倾转后翼右侧的倾转电机旋转2~10度和倾转后翼左侧的倾转电机旋转负2~10度的效果等价,基于此,设计飞行器悬停逆时针的方案为倾转后翼右侧的倾转电机旋转负2~10度,或者,倾转后翼左侧的倾转电机旋转2~10度;
8、飞行器的模式转换过程为:①地面起动→大力效垂起模式,所述倾转电机顺向旋转过一定角度,机翼从水平位置倾转90°到竖直位置,倾转前翼的螺旋桨围绕旋转铰点摆动θ1-90°,倾转中翼的螺旋桨由于直杆无需摆动,倾转后翼的螺旋桨围绕旋转铰点摆动90°-θ2,从而保证垂起时螺旋桨推力方向竖直向下,以最小的功率代价产生最大的起飞重量;②大力效垂起模式→高速经济巡航,所述倾转电机逆向旋转过一定角度,机翼从竖直位置逆向倾转90°到水平位置,倾转前翼的螺旋桨围绕旋转铰点逆向摆动θ1-90°,倾转中翼的螺旋桨由于直杆无需摆动,倾转后翼的螺旋桨围绕旋转铰点逆向摆动90°-θ2,从而保证高速经济巡航时螺旋桨推力水平向后,以最小的电耗能,产生最大的推进效率和推进速度。
9、所述的一种基于高力效和高推进效率引擎的分布式hsvtol飞行器,其特征在于,所述的倾转前翼、倾转中翼、倾转后翼各有左右一对,每个机翼上安装有4~8个小推力级推进螺旋桨,6个机翼上的总数为24~48个,所述的小推力级推进螺旋桨能达到85%~95%的效率,在所需总功率相同的情况下,使用24~48台小型电机比使用一台大型电机轻4.7~8倍,通过使用许多小型电机,使热冷却成为简单的被动解决方案,而不需要复杂的主动液体冷却系统来为一台大型电机散热,并且由于螺旋桨尺寸的缩小以及以超低的噪音优化设计,使得噪音低80~100倍;
10、所述的一种基于高力效和高推进效率引擎的分布式hsvtol飞行器采用分布式控制系统,如总线型拓扑结构,所述的分布式控制系统采用微处理器为基础的控制单元,实现各螺旋桨的分散控制,各螺旋桨有各种各样的控制算法,通过组态独立完成回路控制,具有自诊断功能,一台驱动系统的控制系统崩溃并不影响到其余的驱动系统,并且飞行器具有部分螺旋桨失效的容错特点,能大大提高推进系统的安全性和可靠性,不仅提供分布式推力,也使得飞行器整体的推进效率有明显的提高。
11、所述的一种基于高力效和高推进效率引擎的分布式hsvtol飞行器,其特征在于,所述的小推力级推进螺旋桨达到85%~95%的效率的设计方法为:
12、步骤1:利用相似原理设计螺旋桨,满足下面三个相似准则数:
13、欧拉数:eu=p/(ρv2) (1)
14、式中,v是流体微团的速度,ρ是流体微团的流体密度,p是流体微团的压强;
15、雷诺数:re=ρv′l/u (2)
16、式中,v’是特征速度,ρ是密度,l是特征尺寸,μ是动力粘度;
17、马赫数:ma=v/c (3)
18、式中,v是流体速度,c是当地声速;
19、对于螺旋桨,物理特征尺寸缩放n倍,就意味着特征速度v’放大n倍,这个物理量对应于螺旋桨的转速,即转速扩大n倍,而流体速度v与特征速度v’不同,这是风洞来流速度,和真实的来流速度一样;
20、步骤2:对标力效在4~5g/w的高性能直升机的旋翼,根据相似原理设计出同等力效的小推力级的螺旋桨的转速、直径d1和桨距角,在保证与原推力同等一致的情况下,计算出螺旋桨的等效个数h;
21、步骤3:对标巡航马赫数为0.5~0.8和推进效率在85%~95%的高性能螺旋桨,根据相似原理设计出同等推进效率的小推力级螺旋桨的叶片、转速、直径d2和桨距角,在保证与原推力同等一致的情况下,计算出等效螺旋桨的个数k;
22、步骤4:选择并固定螺旋桨的叶片、直径和总个数,所选择的叶片的叶型截面介于传统螺旋桨弦长叶片和宽弦叶片之间,所选择的叶片的叶形介于传统螺旋桨小后掠角和大后掠角之间,以同时保证大力效垂起和高速经济巡航的叶片气流分离达到最小,所选择的直径为d1和d2的最大者,所选择的总个数为h和k的最大者;
23、步骤5:通过优化螺旋桨的转速和桨距角,得到保证垂直力效满足4~5g/w的设计要求的转速n1和桨距角β1,以及高速经济巡航的推进效率高达90%的转速n2和桨距角β2;
24、步骤6:优化的螺旋桨的转速和桨距角在大力效垂起模式和高速经济巡航模式呈现不同的数值大小,巡航阶段需要更大螺旋桨的转速来产生更高的推进速度,即n2>n1,需要更优的桨距角产生更高的推进效率,即β1≠β2;
25、步骤7:基于n2>n1和β1≠β2的物理规律,在模式转换过程,大力效垂起模式和高速经济巡航模式都采用恒定转速微调桨距角的控制计划,在模式转换过程则采用桨距角和转速同步调节的多变量控制计划,使得系统总升力不变,以保证模式转换过程的连续平稳过渡。
26、与现有技术相比,本发明的优势是:提出了一种基于高力效和高推进效率引擎的分布式hsvtol飞行器,采用纵向空间上相互错开的多桨倾转三翼面布局,使得三翼面尽可能多的容纳小推力级的推进器,具有小翼展大巡航升力和翼面脱落涡互不影响的特点;针对倾转斜翼衍生的斜翼面倾转过程螺旋桨无法同时正对正前方和竖直方向的技术问题,采用蜗轮蜗杆机构驱动曲柄连杆机构和电机从动连杆从而连动调节多个螺旋桨的推力和飞行方向一致;并通过微调垂起模式下的倾转电机,使飞行器具有悬停顺时针或逆时针的偏航能力;由于使用多台小型电机比使用一台大型电机更轻,散热系统更容易设计,螺旋桨噪声更低,故基于相似原理设计出与高性能推进器(垂起力效为4~5g/w和巡航推进效率为90%)相似的小推力级螺旋桨,并用多个高效率小推力级螺旋桨代替大型推进器,具有质量轻-噪声低-散热简单-垂起力效大-高速巡航经济高的优势。