一种用于监测环境污染浓度的无人机
本发明属于环境检测,具体地说,涉及用于监测环境污染浓度的无人机。
背景技术:
1、精确监测环境污染浓度对于环境保护和治理至关重要。传统的环境监测手段往往依赖于地面站点或者手持设备,这些方法通常受到地形限制、监测范围有限且效率较低。尤其是在复杂地形或广阔地区,地面监测设备难以全面覆盖,导致监测数据的局限性和不连续性。
2、为了提升环境监测的效率和准确性,无人机技术被引入到环境监测领域。利用无人机进行空中采样监测,能够突破地面设备的限制,实现大范围、高效率的空气质量检测。然而,现有无人机在环境监测应用中存在一些不足,如飞行稳定性、操作复杂性、监测设备集成度及自动化水平等方面的局限。
3、在现有技术中,无人机要么是固定翼设计,适用于长距离飞行,但不便于垂直起降和精准定位;要么是多旋翼设计,虽然可垂直起降,但飞行距离和速度受形态影响较大,覆盖范围极其有限,影响监测效率。此外,现有无人机的检测系统通常为外挂式,集成度低,保护效果差,传感器的安装和维护较为繁琐,且在监测过程中的空气采样和数据处理能力有待提高。
4、有鉴于此特提出本发明。
技术实现思路
1、为解决上述技术问题,本发明采用技术方案的基本构思是:
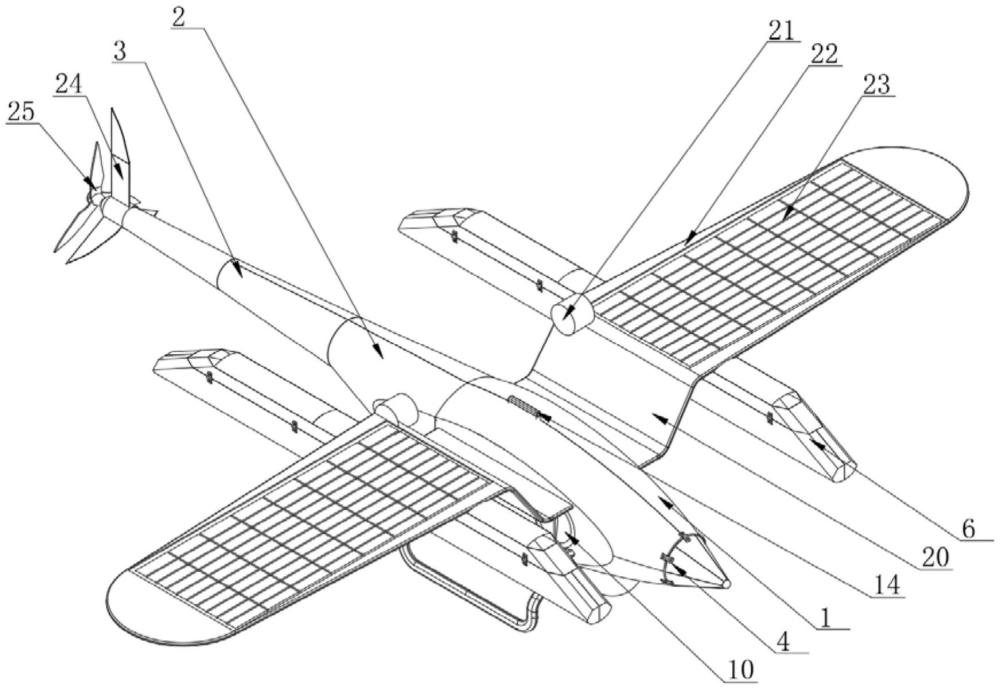
2、一种用于监测环境污染浓度的无人机,包括:
3、由端部舱体、中部舱体和尾部舱体共同构成的壳体;
4、且端部仓体和中部舱体相互分隔封闭;
5、检测室;
6、所述检测室贯穿固定在端部舱体和中部舱体之间,所述检测室的右端贯穿连通在中部舱体的表面;
7、传感阵列;
8、所述传感阵列对称设置在检测室的两侧,用于检测室内气体的高精检测和数据采集;
9、增压罩;
10、所述增压罩位于检测室的左端相连通,所述增压罩的外沿密封贴合在端部舱体的内壁;
11、启闭器;
12、所述启闭器安装设置在端部舱体的一侧,用于气流的通断控制;
13、两个悬停起降器;
14、所述悬停起降器固定连接在机翼的下表面,用于第二飞行姿态控制;
15、推进桨叶;
16、所述推进桨叶位于尾部舱体的末端设置,用于第一飞行姿态的推进控制;
17、驱动器;
18、所述驱动器固定连接在中部舱体的内壁,所述推进桨叶固定在驱动器的输出端,用于驱动推进桨叶的转动。
19、优选的,所述启闭器包括呈固定状态的基座,所述基座的一端贯穿固定有步进电机,所述步进电机的输出轴固定连接有丝杆,所述丝杆的表面螺纹配合有伸缩件;
20、所述伸缩件限位轴向滑动在基座的内壁,所述伸缩件的表面滑动设置有滑套,所述滑套的一侧与伸缩件的一端共同固定有弹簧;
21、所述滑套的表面通过销轴活动连接有若干个第一偏转板,所述第一偏转板的表面通过销轴活动连接有罩形板块,所述罩形板块的外侧壁通过铰链与端部舱体的表面铰接;
22、所述伸缩件的一端固定连接有锁紧杆,所述锁紧杆的弧形侧壁与若干个罩形板块的内壁贴合滑动,所述锁紧杆的一端固定连接有用于若干个罩形板块一端压紧的锁紧头。
23、优选的,所述驱动器包括固定连接在中部舱体内壁的电机架,所述电机架的表面贯穿固定有若干个驱动电机,所述驱动电机的输出轴固定连接有主动齿轮,若干个主动齿轮的表面共同啮合传动有输出齿轮,所述输出齿轮的表面贯穿固定有输出轴,所述输出轴的一端与推进桨叶固定连接;
24、所述输出轴的表面设置有若干个轴架,所述轴架的内壁通过轴承固定输出轴,所述轴架固定在尾部舱体的内壁;
25、所述尾部舱体的一端固定连接有尾翼。
26、优选的,所述基座的表面固定连接有固定架,所述固定架固定连接在端部仓体的内壁。
27、优选的,所述悬停起降器包括固定在机翼下表面固定连接的固定罩,所述固定罩的两侧通过铰链铰接有两个活动罩;
28、所述活动罩内壁的上表面固定连接有减速器和两个限位滑杆,两个限位滑杆的表面共同滑动设置有升降架,所述升降架的表面螺纹贯穿有螺纹杆,所述螺纹杆的顶端固定在减速器的输出端,所述减速器的一侧固定连接有升降电机;
29、所述升降架的两端均设置有无刷电机,所述无刷电机的输出轴固定连接有悬停桨叶;
30、所述升降架的四角处均通过销轴活动连接有第二偏转板,所述第二偏转板的一端与对应活动罩的内壁通过销轴活动连接。
31、优选的,所述检测室的两侧对称设置有控制阀门,所述控制阀门为电磁阀,且电磁阀螺纹安装有高压气瓶,所述高压气瓶贯穿滑动在端部舱体的一侧。
32、优选的,所述端部舱体的下表面设置有玻璃罩,所述玻璃罩的内壁设置有可调摄像头;
33、所述端部舱体的下表面设置有腹部挂载台,所述腹部挂载台用于安装外置检测器。
34、优选的,所述机翼的表面安装有用于第一飞行姿态控制的控制翼,所述机翼的表面还安装有用于控制翼驱动的舵机;
35、所述机翼的上表面设置有太阳能板,所述端部舱体的表面设置有风速计和起落架。
36、优选的,所述端部仓体内壁的两侧固定连接有主控板和飞控板,所述端部舱体内壁的下表面设置有电池包。
37、优选的,所述检测室的右端固定连接有牙片,所述牙片的上表面固定连接有弹性封片,所述弹性封片位于检测室的右端贴合设置,用于检测室右端的单向出气维持。
38、有益效果:
39、本方案在使用时,第一飞行姿态通过启动升降电机,升降电机驱动减速器带着螺纹杆转动,螺纹杆转动时带着升降架滑动在限位滑杆的表面,当升降架向下移动时,通过第二偏转板压动两个活动罩通过铰链偏转,两个活动罩展开的同时,升降架带着两端的无刷电机向下远离固定罩,此时通过驱动无刷电机即可通过悬停桨叶控制垂直升降、悬停或多个方向的飞行运动;
40、在切换第二飞行姿态时,首先启动驱动器的多个驱动电机,驱动电机驱使主动齿轮啮合带着输出齿轮高速转动,输出齿轮受到多个主动齿轮的传动力带着输出轴进行高速的转动,输出轴驱动推进桨叶以较高的速度转动,提供一个推进力,整体能够在高空悬停时通过该动力配合两个太阳能板进行快速飞行移动,同时升降电机驱动螺纹杆反转,悬停起降器处于复位状态,整体呈现快速飞行状态;
41、综上可知,本方案能够在第一飞行姿态下实现垂直的起降,以及小范围的精准定点悬停或巡航进行空气检测,在一个监测点检测完毕后,能够快速切换到第二飞行姿态,使其整体飞行速度提升,且续航距离大大拉长,能够满足较大范围的机动,满足大跨度距离的空气监测,整体能够实现垂直起降,对起降环境要求低,操作简单,使用方便。
42、本方案在需要检测时,通过控制步进电机转动,步进电机驱动丝杆转动,丝杆通过与伸缩件内壁的螺纹配合下,驱动伸缩件轴向伸缩滑动在基座的内壁,伸缩件滑出基座时,弹簧的压力逐渐释放,滑套受到弹簧的压力逐步降低,这个过程中,锁紧杆是同步伸缩件进行轴向运动的,锁紧杆滑动在若干个罩形板块之间,锁紧头随之滑出罩形板块的端部,实现罩形板块接触锁定,当弹簧完全释放后,则伸缩件通过弹簧拉着滑套移动,滑套通过第一偏转板撑着罩形板块通过铰链偏转,使其罩形板块相互分离,其分离力为弹簧的弹性拉力,若出现异物阻挡能够通过弹簧的形变卸力,通过罩形板块开启后外界的空气能够进入到内部;
43、外界的空气首先穿过启闭器,随即在增压罩的汇聚作用下,气流增压进入到检测室,检测室内的传感阵列能够精确且全面的分析气流,并将数据进行采集发送到主控板,增压的气流吹过弹性片排出,通过增压罩的配合,使其悬停时较小的风力均能进行增压并通过弹性片排出;
44、同时能够在飞行过程中,启闭器的间断开启,使其检测时内气流进行置换,能够对气体进行一段时间的仔细检测,并在每次启闭器打开时进行空气置换;
45、在需要校准时,通过打开控制阀门,其为电磁阀,使其高压气瓶的校准气体冲出,并保持启闭器处于闭合状态,高压气瓶内高压气体冲出一定量后快速切断并封闭,高压气体在检测室内形成高压,将内部空气置换并通过弹性封片排出;
46、综上可知,可以实现连续空气监测,间断的空气采样检测,以及能够进行内部空气置换控制,还能够进行内部清洁和自校准操作,保障连续监测的稳定性,满足不同检测的需要,能进行有效的配合。
47、下面结合附图对本发明的具体实施方式作进一步详细的描述。
- 还没有人留言评论。精彩留言会获得点赞!