一种航天器的转移轨道的确定方法及装置
本发明涉及轨道转移,尤其涉及一种航天器的转移轨道的确定方法及装置。
背景技术:
1、航天器(如卫星)在绕中心天体(如地球)运动的过程中,通常,航天器按照给定的轨道运行。在有些情况下,需要对航天器的运动状态进行调整,具体的,可以通过调整航天器的运行轨道以对航天器的运动状态进行调整。
2、目前,在航天器的轨道高度较低的情况下,调整后的运行轨道(以下称为转移轨道)的轨道高度可能小于中心天体的半径,如此,确定的转移轨道是不合理的转移轨道,无法实现航天器的运动状态的调整。
技术实现思路
1、本发明提出一种航天器的转移轨道的确定方法及装置,在航天器执行追击任务的场景中,可以为航天器设计合理的转移轨道,从而能够顺利地调整航天器的运动状态,以促使航天器完成追击任务。
2、为了达到上述目的,本发明的采用如下技术方案:
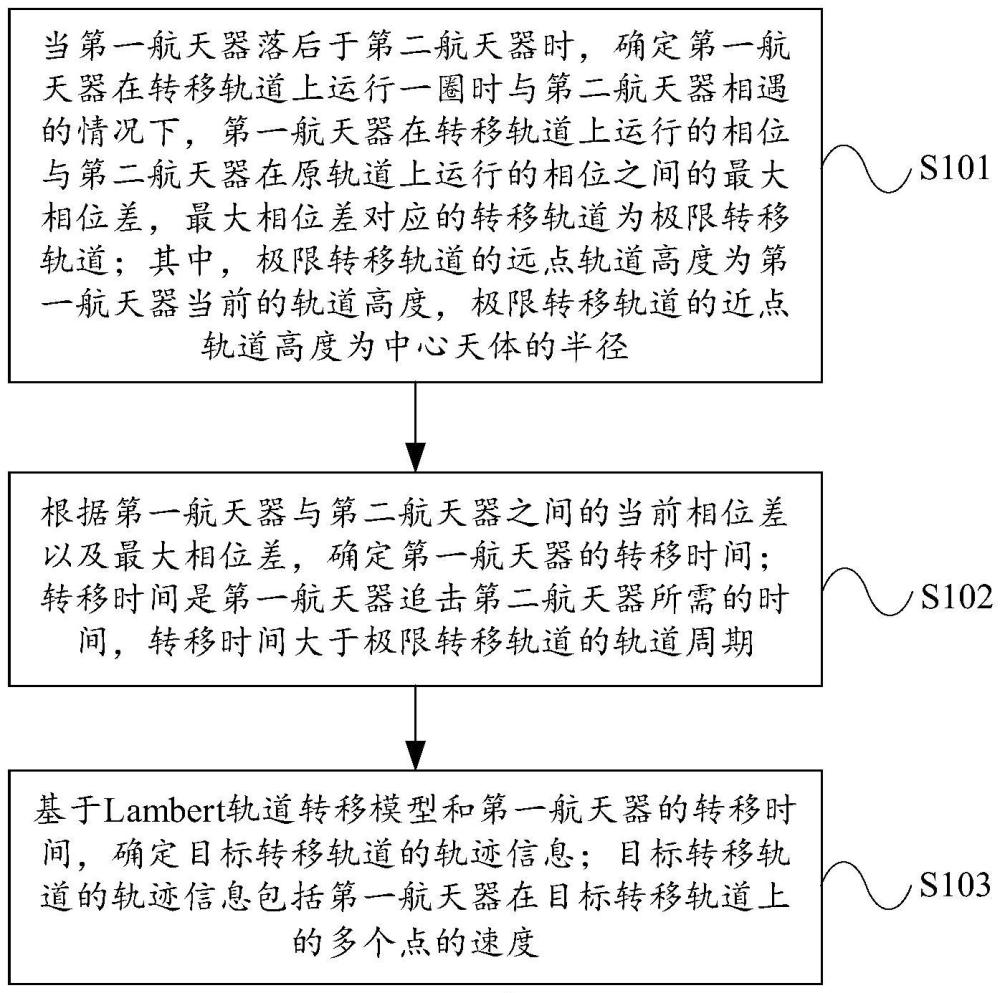
3、第一方面,本发明提供一种航天器的转移轨道的确定方法,应用于第一航天器追击第二航天器的场景中,第一航天器从原轨道转移至目标转移轨道运行以追击第二航天器,第一航天器与第二航天器绕同一中心天体同向运动,该方法包括:当第一航天器落后于第二航天器时,确定第一航天器在转移轨道上运行一圈时与第二航天器相遇的情况下,第一航天器在转移轨道上运行的相位与第二航天器在原轨道上运行的相位之间的最大相位差,最大相位差对应的转移轨道为极限转移轨道,该极限转移轨道的远点轨道高度为第一航天器当前的轨道高度,该极限转移轨道的近点轨道高度为中心天体的半径;并且根据第一航天器与第二航天器之间的当前相位差以及最大相位差,确定第一航天器的转移时间,该转移时间是第一航天器追击第二航天器所需的时间,且转移时间大于极限转移轨道的轨道周期;进而基于lambert轨道转移模型和第一航天器的转移时间,确定目标转移轨道的轨迹信息,该目标转移轨道的轨迹信息包括第一航天器在目标转移轨道上的多个点的速度。
4、本发明提供的航天器的转移轨道的确定方法中,基于最大相位差与第一航天器与第二航天器之间的当前相位差确定的转移时间大于极限转移轨道的轨道周期,可以保证第一航天器的目标转移轨道的轨道高度大于中心天体的半径,从而可以为航天器设计合理的转移轨道,从而能够顺利地调整航天器的运动状态,以促使航天器完成追击任务。
5、在第一方面的一种实现方式中,第一航天器在转移轨道上运行的相位与第二航天器在原轨道上运行的相位之间的最大相位差满足:
6、
7、
8、其中,t1表示极限转移轨道的轨道周期,t2表示第二航天器在原轨道上的轨道周期,表示最大相位差;a表示极限转移轨道的半长轴,μ表示中心天体的引力常数,r1表示极限转移轨道的远点轨道高度,r2表示极限转移轨道的近点轨道高度。
9、在第一方面的一种实现方式中,根据第一航天器与第二航天器之间的当前相位差以及最大相位差,确定第一航天器的转移时间,包括:根据第一航天器与第二航天器之间的当前相位差以及最大相位差,确定第一航天器的预测转移时间;采用梯度下降法对预测转移时间进行优化,得到第一航天器的转移时间。
10、在第一方面的一种实现方式中,在第一航天器与第二航天器之间的当前相位差小于最大相位差的情况下,第一航天器的预测转移时间满足:
11、
12、在第一航天器与第二航天器之间的当前相位差大于或等于最大相位差的情况下,第一航天器的预测转移时间满足:
13、
14、其中,ttrans表示第一航天器的预测转移时间,t2表示第二航天器在原轨道上的轨道周期,δθ表示第一航天器与第二航天器之间的当前相位差。
15、在第一方面的一种实现方式中,基于lambert轨道转移模型和第一航天器的转移时间,确定目标转移轨道的轨迹信息,包括:基于lambert轨道转移模型和第一航天器的转移时间,确定第一航天器在目标转移轨道上的起点速度和终点速度;对目标转移轨道的起点速度和终点速度进行插值处理,得到第一航天器在目标转移轨道上的多个点的速度。
16、在第一方面的一种实现方式中,在基于lambert轨道转移模型和第一航天器的转移时间,确定目标转移轨道的轨迹信息之前,本发明提供的方法还包括:当第一航天器领先于第二航天器时,确定第一航天器在转移轨道上运行一圈时与第二航天器相遇的情况下,第一航天器的预测转移时间;其中,第一航天器的预测转移时间,满足:
17、
18、其中,ttrans表示第一航天器的预测转移时间,t2表示第二航天器在原轨道上的轨道周期,δθ表示第一航天器与第二航天器之间的当前相位差;采用梯度下降法对预测转移时间进行优化,得到第一航天器的转移时间。
19、在第一方面的一种实现方式中,lambert轨道转移模型满足:
20、
21、其中,v0表示转移时间的开始时刻第一航天器的速度矢量,v1表示转移时间的结束时刻第一航天器的速度矢量,g(t1,t0)表示第一轨道状态转移函数,f(t1,t0)表示第二轨道状态转移函数,gt(t1,t0)表示第一轨道状态转移函数关于时间的导数,t0表示转移时间的开始时刻,t1表示转移时间的结束时刻,r0表示转移时间的开始时刻第一航天器的位置矢量,r1表示转移时间的结束时刻第一航天器的位置矢量。
22、第二方面,本发明提供一种航天器的转移轨道的确定装置,包括相位差确定模块、转移时间确定模块和转移轨道确定模块;相位差确定模块用于,当第一航天器落后于第二航天器时,确定第一航天器在转移轨道上运行一圈时与第二航天器相遇的情况下,第一航天器在转移轨道上运行的相位与第二航天器在原轨道上运行的相位之间的最大相位差,最大相位差对应的转移轨道为极限转移轨道;其中,极限转移轨道的远点轨道高度为第一航天器当前的轨道高度,极限转移轨道的近点轨道高度为中心天体的半径;转移时间确定模块用于,根据第一航天器与第二航天器之间的当前相位差以及最大相位差,确定第一航天器的转移时间;转移时间是第一航天器追击第二航天器所需的时间,转移时间大于所述极限转移轨道的轨道周期;转移轨道确定模块用于,基于lambert轨道转移模型和第一航天器的转移时间,确定目标转移轨道的轨迹信息;目标转移轨道的轨迹信息包括第一航天器在目标转移轨道上的多个点的速度。
23、在第二方面的一种实现方式中,转移时间确定模块具体用于,根据第一航天器与第二航天器之间的当前相位差以及最大相位差,确定第一航天器的预测转移时间。采用梯度下降法对预测转移时间进行优化,得到第一航天器的转移时间。
24、在第二方面的一种实现方式中,转移轨道确定模块具体用于,基于lambert轨道转移模型和第一航天器的转移时间,确定第一航天器在目标转移轨道上的起点速度和终点速度;对目标转移轨道的起点速度和终点速度进行插值处理,得到第一航天器在目标转移轨道上的多个点的速度。
25、在第二方面的一种实现方式中,转移时间确定模块还用于,当第一航天器领先于第二航天器时,确定第一航天器在转移轨道上运行一圈时与第二航天器相遇的情况下,第一航天器的预测转移时间。其中,第一航天器的预测转移时间,满足:
26、
27、其中,ttrans表示第一航天器的预测转移时间,t2表示第二航天器在原轨道上的轨道周期,δθ表示第一航天器与第二航天器之间的当前相位差;采用梯度下降法对预测转移时间进行优化,得到第一航天器的转移时间。
28、第三方面,本发明提供一种电子设备,包括处理器和与所述处理器耦合连接的存储器;所述存储器用于存储计算机指令,当所述电子设备运行时,所述处理器执行存储器存储的所述计算机指令,以使得所述电子设备执行如上述第一方面或其任一种实现方式中所述的方法。
29、第四方面,本发明提供一种计算机可读存储介质,包括计算机程序指令,当所述计算机程序指令由计算机执行时,使得所述计算机执行如上述第一方面或其任一种实现方式中所述的方法。
30、第五方面,本发明提供一种计算机程序产品,包括计算机程序指令,当所述计算机程序指令在计算机上运行时,使得所述计算机执行如上述第一方面或其任一种实现方式中所述的方法。
31、上述第二方面至第五方面及其可能的实施方式对应的技术效果可以参考上述对第一方面及其对可能的实施方式的技术效果的描述,此处不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!