基于复杂海况下无人艇上无人机自主保障平台的无人机捕获系统及方法
本发明属于无人艇和无人机协同作业,具体涉及基于复杂海况下无人艇上无人机自主保障平台的无人机捕获系统及方法。
背景技术:
1、随着无人技术在海洋应用领域的快速发展,无人艇和无人机的协同操作成为了一个热点研究方向,尤其是在复杂的海况中,如何有效、安全地捕获和调整无人机成为了一个亟待解决的问题。
2、2015年,韩国soyeon koo等人研究了一种考虑载体运动的模型预测自动着舰系统。通过研究无人机与舰载甲板之间的相对姿态关系,实现了舰载无人机自主安全着陆制导与控制。同年,tan等人研究了一种基于不变椭球体的方法,即使在风扰动、船舶垂荡运动和测量噪声的情况下,普通四旋翼无人机也能够自主降落于船舶甲板,展现了良好的降落性能。同年,葡萄牙morais f等人对无人机在移动无人艇上降落进行了研究。通过无人机上机载rgb摄像头对船舰上的标志进行跟踪,使用卡尔曼滤波器和epnp的方法对无人机和船舰进行位置和姿态估计计算,从而完成最终阶段的着舰过程。
3、2016年,西北工业大学陈怀民等人通过测量舰船的横摇和沉浮运动,并根据测量的历史数据预测未来2~3s内着舰时的状态,再配置以稳定的下降控制,实现无人机安全着舰。为了控制触舰时飞机与甲板之间的相对垂直速度,并对下降速率与高度、时间两种控制率进行对比,并在matlab/simulink中进行了仿真验证,但并未在实际中验证。
4、2019年,华中科技大学的郭砚辉等人研究了基于视觉引导的无人机自主着艇系统,通过颜色、轮廓、靶标图案和相应的识别算法,计算降落平台和无人机的位置关系,从而完成无人机的自主着艇,在陆地模拟动态降落实验和水面无人艇的降落实验方面均取得了成功。同年,华中科技大学自动化学院在广东松山湖采用自主研发的huster-68无人艇和无人机,相继克服了识别慢、对不准、跟不上、干扰大等问题,成功完成了基于视觉的机艇协同运动起降。同年有学者设计了一套辅助无人机自主着陆的视觉辅助系统,但是对于随海面波动实时变化的无人艇着陆平台,尚不能实现平稳安全的着陆。
5、2020年,国防科技大学提出了针对动-动平台视觉相对定位、定姿难的问题,搭建一套可模拟不同海况下的无人机着舰物理仿真系统,进行基于机载视觉和imu融合的无人机自主着舰研究,并进行了试验验证。试验结果表明:当海况在5级以下时,无人机的降落角度平均误差在3°范围以内,可以适合降落;当海况大于5级时,无人机的降落平均误差急剧升高。同年,一种无人机回收系统及回收方法,利用直线模组、倒伏机构以及姿态调整机构,实现对无人机的精确、高效、稳定的捕获和锁定。但该系统中包含多个机械和电子部件(如电动推杆、导轨、传感器等),这导致系统的维护和故障排查较为复杂。并不适合自愈能力差的无人系统。
6、2021年,采用人工标识april tag与无人机的视觉引导跟踪算法相结合的方案,实现无人机的悬停和在移动平台上的着陆,但对于起伏不定的无人艇,仍然无法保证能够安全着陆。
7、2022年,燕山大学针对无人机自主着舰技术的实际工程需求,在理论上,提出了基于机载摄像头与艇载惯性导航装置相结合的自主降落方案。通过对降落标志的识别,结合无人艇传回的姿态数据,对着舰的最佳时机进行判定,以实现无人机的安全着舰。同年,内蒙古洋悦科技有限公司设计了一种小型的无人机海上保障平台,为无人机提供全自动全天候的起降、换电、充电、加油、海面转移以及躲避风浪雨水(潜入海中)等功能。该平台体型较小,并不具备柔性捕获功能,需要无人机进行自主降落,在遇到海浪时安全性大大降低,且类似于中继站,仅适合于小范围内对无人机进行续航和保护功能。
8、2023年,国防科技大学提出了一种无人机自主着舰视觉引导方法,实现了大距离跨度条件下机舰间相对位姿参数的高精度测量,可为无人机自主着舰提供可靠引导信息。同年,燕山大学设计一种基于串联机械臂捕获回收无人机系统,为无人机的自主回收方式提供了新的技术路线方案。同年,太原中正众成地理信息科技有限公司设计了一个多旋翼无人机的降落捕获装置。在无人机自主降落的同时,该系统可以调整降落捕获辅助太阳能板的位置,帮助无人机顺利降落并自动滑向无线充电板位置进行充电。但该装置郭煜依赖太阳能供电,缺乏后备保障,且电动推杆系统过于复杂,容错率较低,不适合与无人机相对位移较大的捕获系统。同年,武汉理工大学设计了一种使用无人艇保障无人机远洋作业的保障平台装置。该装置在复杂海况下,建立了自动回收模块通过环形轨道、机械扇骨、柔性回收平台等组件实现无人机的自动回收,特别是采用了阻尼软材料的柔性回收平台,能够在恶劣天气条件下有效缓冲无人机的降落冲击,减少损坏风险。并具备自主充电装置。但该平台只适用于对小型旋翼无人机的捕获,无法承载大型复合翼无人机。
9、通过对国内外研究现状的分析发现,无人艇对大型复合翼无人机的捕获大多使用gps、光传感及视觉辅助等方式实现自主降落。但在实际任务中,由于海况等不确定因素影响,使得无人机自主降落控制算法运算量大,所以很难做到实时数据处理及精准降落,因此无人机下降到一定高度时,只能选择直接摔落的方式着艇,使得降落的可靠性降低。此外,在2023年,有研究提出一种使用机械手臂捕获无人机的控制研究,目前其仍处于理论研究中,尚未实现机械手臂与无人机之间的静态贴合。
10、综上,目前在对无人艇捕获复合翼无人机技术上,国内外尚未有一种柔性捕获的方式。故而,本发明提出了一种针对1-5级海况下无人艇对复合翼无人机的柔性捕获机构。该技术通过光学传导及视觉辅助,实现了对无人机位姿信息的获取,并通过信号处理来锁定无人机活动区域及相对姿态变换范围。然后通过柔性机构捕获并校准姿态,实现无人艇对无人机的柔性捕获技术。此外,对比于当前所研究的串联多关节机械手臂捕获机构来说,该方法在装置及其控制系统上简化了机械构造与结构框架,更利于在现实中实现。通过大量的减少了控制算法的运算量,一方面可以得到无人机更精准的姿态信息,从而达到对无人机的实时捕获;另一方面也提高了对无人机捕获的可靠性及安全性。
技术实现思路
1、本发明提供了基于复杂海况下无人艇上无人机自主保障平台的无人机捕获系统,主要目的是实现两个关键功能:首先,面对5级海况,本发明能够柔性捕获大型复合翼无人机,确保其在恶劣天气条件下降落的安全和稳定;其次,捕获无人机后,本发明能对无人机的位姿进行有效调整,以便于后续操作的顺利进行。本发明旨在提高无人艇和无人机协同作业的效率和安全性,拓宽其在海洋探索、救援、监测等领域的应用范围。
2、基于复杂海况下无人艇上无人机自主保障平台的无人机捕获系统,包括停机坪和柔性捕获机构;所述停机坪安装在无人机自主保障平台的顶面上,可绕安装处旋转,在停机坪上安装有与无人机起落架适配的起落架卡子,起落架卡子可伸出或缩回停机坪内;所述柔性捕获机构包括两组连杆、移动齿条和柔性夹持杆;所述移动齿条安装在无人机自主保障平台的顶面长边两侧;所述连杆两端通过连接机构安装在移动齿条上,连接机构内部设有与移动齿条适配的移动齿轮,连杆端部通过曲柄机构与连接机构连接,在连杆顶面设有滑轨;所述柔性夹持杆由柔性材料制成,柔性夹持杆通过夹持滑块安装在连杆顶面的滑轨上。
3、进一步地,初始状态下,两组连杆分别位于无人机自主保障平台顶面宽边两侧;当无人机与无人机自主保障平台交互后,两组连杆沿移动齿条移动到无人机投影波动区域的边沿;随着无人机的缓慢下落,无人机的投影波动范围逐渐变小,两组连杆及柔性夹持杆的位置随之进行调整;在无人机着艇瞬间,两组柔性夹持杆夹取无人机起落架,完成无人机捕获;
4、捕获成功后,对无人机位姿进行调整;首先通过夹持滑块在连杆顶面的滑轨上移动,将无人机移动到停机坪中心,之后缩在停机坪内部的起落架卡子向外伸出卡住无人机起落架,通过停机坪的旋转使无人机姿态摆正,最后通过连杆沿移动齿条移动,对无人机进行水平方向上的微调,使无人机达到预期位姿。
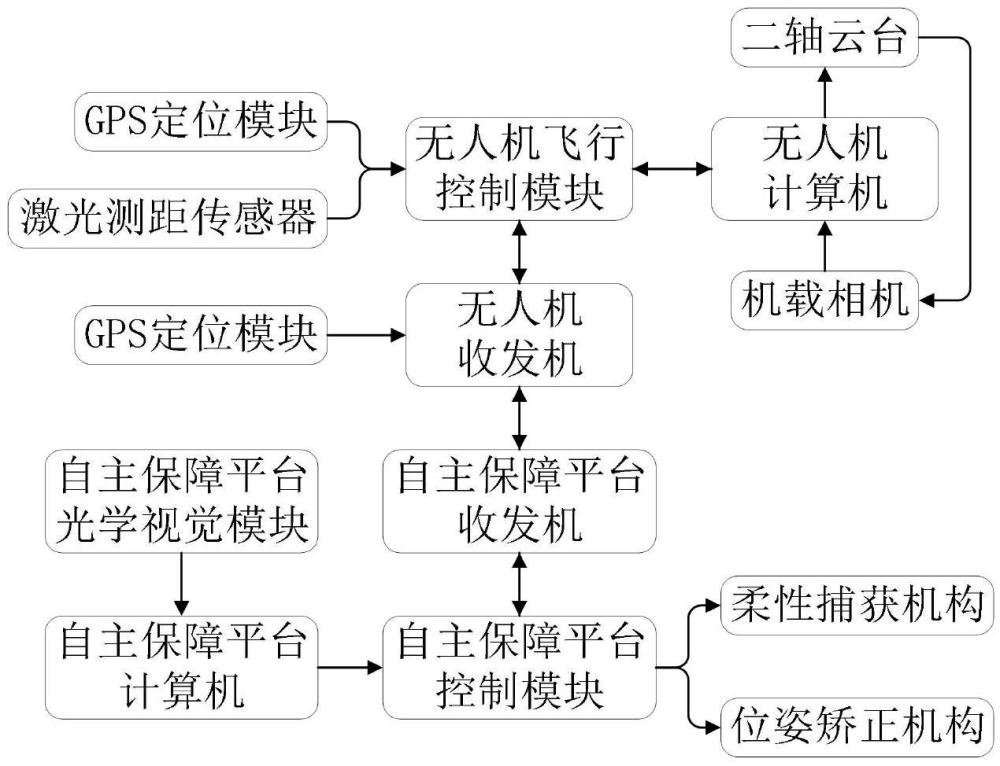
5、进一步地,还包括机载相机模块、gps定位模块、激光测距传感器模块、光学视觉模块、捕获结构控制模块、远程控制模块和本地控制模块;
6、无人机通过搭载的机载相机模块和gps定位模块获取自身的位置和停机坪上的标识信息,并将信息通过无人机的收发机发送到无人机自主保障平台的收发机;无人机搭载的激光测距传感器模块提供无人机与无人机自主保障平台之间距离的精确测量,用于准确调整无人机的高度;无人机自主保障平台的光学视觉模块实时监测无人机与无人机自主保障平台之间的相对位姿变化,并将这些信息反馈给捕获结构控制模块;通过信息交换和各模块间的协作,无人机自主保障平台可以快速准确地捕获到着艇后的无人机;在整个过程中,远程控制模块和本地控制模块用于确保操作的顺畅进行和应对可能出现的突发情况。
7、进一步地,所述光学视觉模块包括四个摄像头,分别位于四边形的无人机自主保障平台顶面的四个角处,工作时四个摄像头采用协同工作的方式,从四个角度来捕获无人机当前的图像,对图像进行分析和处理,提取出用于导航和定位的关键信息,并根据信息执行对无人机的导航指令及对柔性捕获机构的运动控制。
8、进一步地,还包括无人机计算机模块、二轴云台模块、无人机飞行控制模块、自主保障平台计算机模块和自主保障平台控制模块;
9、所述无人机计算机模块用于根据实时数据和需求,指挥二轴云台模块调整相机的角度,同时调整无人机的飞行姿态,以保证拍摄任务的精准性;还负责处理来自gps定位模块、激光测距传感器模块和机载相机模块的数据,并将其发送给无人机飞行控制模块;
10、所述无人机飞行控制模块用于根据gps定位模块和激光测距传感器的测量数据,结合无人机计算机模块计算的自身姿态信息,计算出无人机的当前位置和姿态,从而控制无人机的电机及飞行姿态,实现无人机的飞行控制;
11、所述自主保障平台计算机模块用于接收来自光学视觉模块、激光测距传感器模块和无人机收发机的信号,并结合无人机相对于无人机自主保障平台的姿态信息,计算出无人机的位置和姿态,并向自主保障平台控制模块发送指令;
12、所述自主保障平台控制模块用于根据自主保障平台计算机模用发出的指令控制柔性捕获机构的运动,根据收到的位置和位姿信息准确捕获无人机,确保捕获过程的顺利进行;在无人机捕获后,根据自主保障平台计算机模块的指令调整无人机最终的位姿。
13、基于复杂海况下无人艇上无人机自主保障平台的无人机捕获方法,包括以下步骤:
14、步骤1:无人机通过gps定位模块导航至无人机自主保障平台所在区域;
15、步骤2:无人机飞临无人机自主保障平台上方后,启动机载相机模块,搜索并识别无人机自主保障平台上停机坪的标识,标记降落点;
16、步骤3:无人机使用激光测距传感器模块获取其与无人机自主保障平台的高度差,同时无人机自主保障平台的光学视觉模块监控无人机的位置和姿态,并向无人机提供实时反馈;
17、无人机缓慢下落的同时调整姿态,直至无人机处于适合着艇的安全高度;若监控到无人机当前姿态不适合捕获,则无人机根据反馈上升一定的高度重新调整姿态;
18、步骤4:无人机自主保障平台确认无人机当前位置和姿态适宜后,无人机开始降落;
19、降落过程中,一方面无人机继续通过机载相机模块和激光测距传感器模块监测与无人机自主保障平台的相对位置和高度,另一方面无人机自主保障平台的光学视觉模块也会预测无人机预计的着艇点,根据无人机与无人机自主保障平台的信息交互,对柔性捕获机构进行实时微调;
20、步骤5:在持续的监测和微调下,无人机最终精确地降落在停机坪的预定位置上,与此同时,柔性捕获机构夹取无人机的起落架,完成无人机捕获;
21、步骤6:捕获成功后,对无人机位姿进行调整,使无人机准确的停放在维护中心,保障系统对无人机进行整体的维护后,将无人机入库放入机箱指定位置。
22、进一步地,步骤4中,由于海浪的扰动使无人机自主保障平台的位置和姿态会不断变化,需要实时监测无人机的位置,并调整柔性捕获机构的位置来进行补偿,具体方法为:
23、步骤4.1:在无人机自主保障平台的转动中心处建立坐标系ow,作为全局世界坐标系;在柔性捕获机构的基座中心建立坐标系ob,并在柔性捕获机构中心位置建立坐标系ot;建立无人机坐标系oo,建立惯性传感器坐标系osi,在惯性传感器初始状态位置处建立坐标系os;所述惯性传感器安装于无人机自主保障平台的甲板平台上,用于实时检测无人机自主保障平台的位置、姿态数据;
24、步骤4.2:计算柔性捕获机构相对于柔性捕获机构基座中心的姿态矩阵
25、
26、其中,表示惯性传感器相对于全局坐标系的姿态矩阵;表示惯性传感器坐标系osi到惯性传感器初始状态坐标系os的齐次变换矩阵;表示柔性捕获机构的基座相对于传感器坐标系的姿态矩阵;表示柔性捕获机构相对于全局坐标系的姿态矩阵;
27、步骤4.3:通过无人机自主保障平台的光学视觉模块获取无人机的位姿估计结合柔性捕获机构相对于柔性捕获机构基座中心的姿态矩阵计算出无人机相对于柔性捕获机构的变换矩阵
28、
29、步骤4.4:根据无人机相对于柔性捕获机构的变换矩阵获取目标点坐标(xf,yf),进行柔性捕获机构的二维笛卡尔空间轨迹规划,获取柔性捕获机构当前二阶位置矩阵l;
30、
31、其中,θ是无人机在无人机自主保障平台降落后,无人机相对于无人机自主保障平台上的柔性捕获机构产生的偏移角;
32、x(t)=(1-t)·x0+t·xf
33、y(t)=(1-t)·x0+t·yf
34、
35、其中,t是归一化时间参数,取值范围是[0,1];当t=0时,柔性捕获机构的位置在初始点(x0,y0);当t=1时,柔性捕获机构位置在目标点(xf,yf);
36、步骤4.5:计算柔性捕获机构当前二阶实时位置矩阵l与期望二阶位置矩阵lf之间的二阶偏差矩阵e;
37、
38、步骤4.6:根据二阶偏差矩阵e调整柔性捕获机构的位置,以补偿海浪扰动带来的位置和姿态的变化,确保无人机能够被准确捕获。
39、本发明的有益效果在于:
40、本发明设计了能够在5级海况下操作的无人机自主保障平台的无人机捕获系统,该系统安装在无人艇上,具备无人机自主捕获、运转及停放、自主加油、自身状态监测、复飞预准备等功能与设备需求。本发明设计的柔性捕获机构能使无人机被安全捕获,为后续转运至保障平台做好基础准备工作。本发明通过柔性捕获机制和位姿调整功能,能显著提高无人机在复杂海况下的作业安全性,降低任务执行过程中的风险。本发明设计的无人机捕获系统能够使无人艇和无人机在更广泛的海洋环境中展开作业,从而能够支持更多的海洋科研、救援和监测任务,增强海洋作业的能力和范围。本发明将促进航空、船舶、机器人技术等多个领域的交叉融合,为未来的综合海洋作业系统提供参考和实践经验。
- 还没有人留言评论。精彩留言会获得点赞!