一种基于无人机的矿山采样装置的制作方法
本技术涉及矿山采样,具体为一种基于无人机的矿山采样装置。
背景技术:
1、矿山包括煤矿、金属矿、非金属矿、建材矿和化学矿等等。矿山规模(也称生产能力)通常用年产量或日产量表示。年产量即矿山每年生产的矿石数量。按产量的大小,分为大型、中型、小型3种类型。降低采掘成本的主要途径是提高劳动生产率及产品质量,降低物资消耗,矿山开采过程中,首先需要对开采的矿山进行地质采样,以得出开采的数据。
2、现有技术针对矿山采样也提出一种改进方案,如公开号cn117470581a申请公开了一种煤矿矿山地质检测用采样机,包括固定框架、支撑柱和第一液压缸,所述固定框架的底部安装有支撑柱,且固定框架的正上方位置安装有第一液压缸;还包括:第一固定筒,其与所述第一液压缸的输出端相连接,所述第一固定筒的外壁设置有限位板,且限位板和固定框架之间设置有加固机构。该一种煤矿矿山地质检测用采样机,设置有加固机构,且加固机构包括第一连接杆、第二连接杆和对接块,并且第二连接杆的外壁设置有等角度分布的对接块,对接块和第一连接杆的内壁为滑动连接,这样在限位板下降时,可以带动第二连接杆一起下降,在加固机构的作用下,可以使限位板下降得更加平稳,进一步保证该采样机使用时的稳定性。
3、上述技术方案虽然提高了矿山在采样时的稳定性,然而在具体使用时仍存在其他问题,如在一些便捷地方只需工作人员手持采样柱便可对矿石进行采样,而对于矿山的较高位置导致工作人员难以爬到这些地方进行采样,如此不能很好地检测出矿物质的具体成分。
4、所以有必要提供一种基于无人机的矿山采样装置来解决上述问题。
5、需要说明的是,本背景技术部分中公开的以上信息仅用于理解本技术构思的背景技术,并且因此,它可以包含不构成现有技术的信息。
技术实现思路
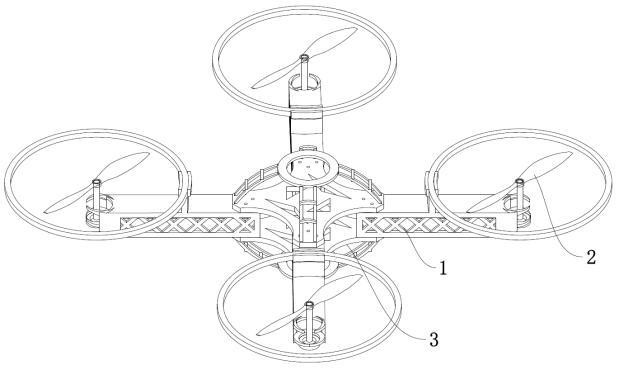
1、本技术解决其技术问题所采用的技术方案是:一种基于无人机的矿山采样装置,包括无人机机体,所述无人机机体的四周设置有螺旋桨,无人机机体通过支杆与螺旋桨连接,所述无人机机体的材质为碳纤维,所述无人机机体的下方设置有控制室,所述控制室用于带动螺旋桨转动,所述控制室的内部开设有控制腔,所述控制腔内部设置有两个采样杆,所述控制腔内部设置有采样机构,采样机构用于带动两个采样杆转动并对矿山采样;工作时,矿山在开采的过程中需要对一些位置进行采样,以研究确定矿产质量,物化性质以及矿物成分等,在一些便捷地方只需工作人员手持采样柱便可对矿石进行采样,而对于矿山的较高位置且工作人员难以爬到的这些位置,此时就需要用到本技术中的采样装置,当出现这种情况时,工作人员通过控制室的控制系统将螺旋桨进行驱动,使其带动无人机机体移动到矿山的高处位置,通过无人机机体自身与外接摄像将无人机停放在矿山的适宜位置,之后通过采样机构带动采样杆移动,使得采样杆对矿物质自动采样处理,操作较为方便,且有利于后续矿山的采样。
2、进一步的,所述采样机构包括滑动设置在控制腔的电动推杆,所述电动推杆的伸缩端固定安装有棘齿板,所述控制腔的内部转动设置有扇形齿轮,所述扇形齿轮和棘齿板啮合连接,所述采样杆固定安装于扇形齿轮的外表面,所述采样杆端部的形状为锥形,且采样杆整体形状为圆弧形;工作时,在初始状态下,采样杆位于控制腔的内部;当无人机机体置于矿山的适宜位置时,通过控制电动推杆的伸缩端移动,使得电动推杆的伸缩端带动棘齿板下移,棘齿板会带动与其啮合的扇形齿轮转动,扇形齿轮带动其外壁的采样杆向远离控制腔一侧移动,之后采样杆会穿过控制腔内部且其锥形头会伸入矿物质一侧,并对矿物质进行采样处理,操作较为方便。
3、进一步的,所述采样机构还包括开设在采样杆表面的收集凹槽,所述收集凹槽的槽壁转动设置有遮挡板,所述遮挡板的形状和收集凹槽的形状相适配,所述采样杆的内部设置有限位单元,限位单元用于将遮挡板打开;工作时,当采样杆的锥形头跟随扇形齿轮同步转动时,采样杆会逐步地嵌入至矿山内部,随后在限位单元的作用下,遮挡板会被打开,从而收集凹槽裸露而出,且此时采样杆和收集凹槽位于矿山内部,进而细碎的矿物质会自动掉落至收集凹槽内部,实现对矿物质的自动回收。
4、进一步的,所述限位单元包括开设在采样杆内部的弧形槽,所述弧形槽的内部转动设置有穿透杆,所述穿透杆的形状为细锥形,所述穿透杆的表面固定安装有限位支柱一,所述遮挡板的侧壁固定安装有限位支柱二,所述穿透杆在移动过程中,限位支柱一会与限位支柱二接触。
5、进一步的,所述遮挡板通过转柱转动设置在收集凹槽的槽壁,且转柱的外周面套接有限位扭簧。
6、进一步的,所述弧形槽的槽壁固定安装有支撑弹簧,所述支撑弹簧的端部与穿透杆的端部连接,所述控制腔的腔壁开设有与采样杆相适配的环形槽;工作时,当穿透杆受到矿物质的压力移动时,穿透杆会同时挤压支撑弹簧,而且支撑弹簧会给予穿透杆一定的限位力,方便采样杆移动到矿物质较深位置处时遮挡板才会被打开,如此能方便收集凹槽对矿物质的采集。
7、进一步的,所述遮挡板的侧壁固定安装有触点一,所述采样杆的侧壁与触点一对应位置处安装有触点二;工作时,在初始状态下,即遮挡板与收集凹槽合在一起时,触点一和触点二不接触;当遮挡板受到限位支柱一的挤压力而发生一定角度转动时,遮挡板会同时带动触点一转动,之后触点一和触点二会接触,且外部电路接通,此时工作人员会控制棘齿板和扇形齿轮停止运转,进而矿物质会缓慢地进入到收集凹槽的内部,如此设计,能使得工作人员持续性观测到无人机的具体情况,避免采样杆转动角度过大导致对矿物质采集效果不好的问题。
8、进一步地,所述控制室的外壁设置有两个抓地架,所述抓地架底端的形状为v型,所述抓地架的底端设置有多个抓地齿,抓地齿的形状为锥形。
9、进一步的,每个所述抓地架的内部均滑动设置有嵌入杆,所述嵌入杆底端的形状为锥形,所述电动推杆的伸缩端固定安装有两个联动杆,所述联动杆远离电动推杆的一侧与嵌入杆端部接触。
10、进一步地,所述控制腔的内部开设有与联动杆相适配的滑槽。
11、本技术的有益效果是:本技术提供的一种基于无人机的矿山采样装置,通过控制室的控制系统将螺旋桨进行驱动,使其带动无人机机体移动到矿山的高处位置,通过无人机机体自身与外接摄像将无人机停放在矿山的适宜位置,之后通过采样机构带动采样杆移动,使得采样杆对矿物质自动采样处理,操作较为方便,且有利于后续矿山的采样。
12、通过穿透杆在弧形槽的内部呈一定幅度的转动,同时采样杆也会缓慢的进入到矿山内部,在采样杆移动到矿山内部一定位置时,此时穿透杆会带动限位支柱一移动到限位支柱二一侧,限位支柱一会挤压限位支柱二,使得限位支柱二带动遮挡板远离收集凹槽,随后收集凹槽被打开一个缺口,故而矿物质会沿着这个缺口进入到收集凹槽的内部,实现对矿物质的自动采样处理,操作较为方便。
13、通过触点一和触点二接触,且外部电路接通,此时工作人员会控制棘齿板和扇形齿轮停止运转,进而矿物质会缓慢地进入到收集凹槽的内部,如此设计,能使得工作人员持续性观测到无人机的具体情况,避免采样杆转动角度过大导致对矿物质采集效果不好的问题。
14、除了上面所描述的目的、特征和优点之外,本技术还有其它的目的、特征和优点。下面将参照图,对本技术作进一步详细的说明。
- 还没有人留言评论。精彩留言会获得点赞!