基于阵列天线的微纳卫星编队多目标姿态控制方法及系统
本发明涉及微纳卫星编队姿态控制,尤其涉及一种基于阵列天线的微纳卫星编队多目标姿态控制方法及系统。
背景技术:
1、近年来,微纳卫星编队控制技术在商业航天、科学研究以及国防安全等多个领域得到了广泛的应用。微纳卫星编队通过在轨道上形成动态网络,各卫星之间进行信息交互,可有效提高任务执行的效率和系统的容错性,增强系统的整体性能和灵活性。然而,在实际应用中仍存在着许多亟待解决的挑战,其中微纳卫星编队的姿态控制技术也是其关键之一。传统的导航与姿态控制方法往往需要依赖高精度传感器,如星敏感器、太阳传感器、磁转矩、地球传感器或陀螺仪等,这些传感器不仅增加了微纳卫星的载重负担,同时也增大了控制误差。
技术实现思路
1、本发明实施例的主要目的在于提出一种基于阵列天线的微纳卫星编队多目标姿态控制方法及系统,实现微纳卫星编队中各卫星的精确姿态控制。
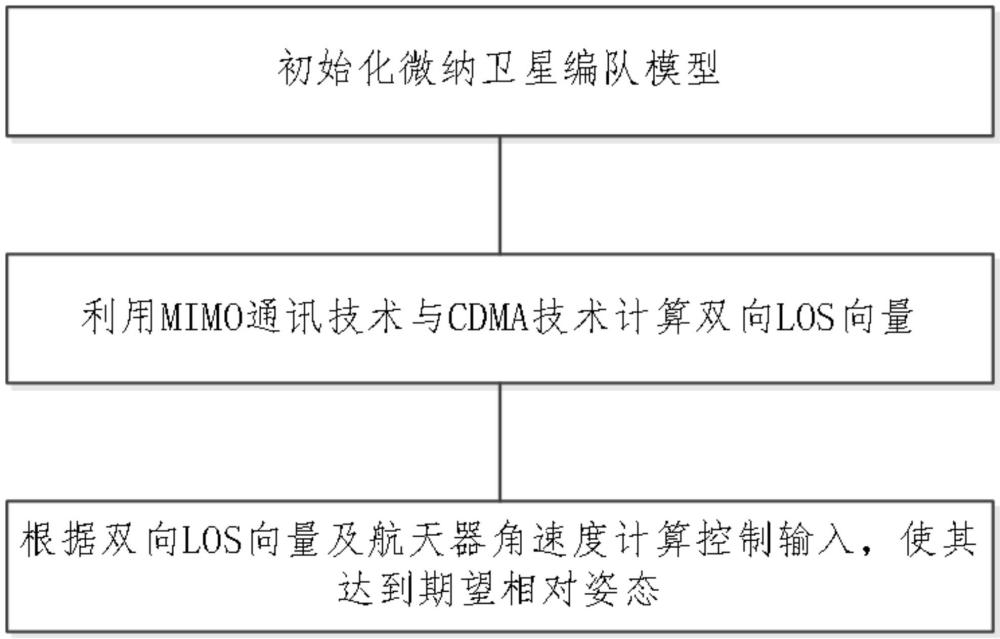
2、为实现上述目的,本发明实施例的一方面提出了一种基于阵列天线的微纳卫星编队多目标姿态控制方法,包括以下步骤:
3、初始化微纳卫星编队模型;其中所述微纳卫星编队包括一艘主航天器、一艘服务航天器、任意艘从航天器,形成主从式结构;
4、利用mimo通讯技术与cdma技术计算双向los向量;
5、根据所述双向los向量以及航天器角速度,计算控制输入,使得所述控制输入达到期望相对姿态,完成对所述微纳卫星编队的多目标姿态控制。
6、在一些实施例中,所述微纳卫星编队模型中每个从航天器被分配一个预设的正交扩频序列,所述正交扩频序列的表达式为:
7、
8、其中,ak(τ)代表航天器的扩频序列;l代表序列的长度;k代表航天器的索引;l代表序列中的索引;b(k,l)代表第k个航天器的第l个序列元素的符号;τ代表时间变量;tb代表周期;
9、所述正交扩频序列用于对载波进行调制,并通过其搭载的天线阵列发射信号;
10、所述主航天器和所述服务航天器则作为接收端,接收到的信号是所有从航天器阵元发射信号的叠加,通过滑动相关和二维联合谱峰搜索技术,估计并识别出所有从航天器到主航天器与服务航天器的视距信号传播路径的三维到达角和出发角。
11、在一些实施例中,所述利用mimo通讯技术与cdma技术计算双向los向量这一步骤中,所述双向los向量的计算公式为:
12、
13、其中,vk,i代表从航天器到主、服务航天器的los向量;αk,i代表单位los向量在x轴上的投影;βk,i代表单位los向量在y轴上的投影;γk,i代表单位los向量在z轴上的投影;φk,i代表单位los向量与y轴的夹角;θk,i代表单位los向量与x轴的夹角;k代表从航天器的索引;i表示主航天器及服务航天器的索引,i=1时表示主航天器,i=2时表示服务航天器。
14、在一些实施例中,所述根据所述双向los向量以及航天器角速度,计算控制输入这一步骤中,每个从航天器的相对姿态为本体坐标系相对于本体坐标系的旋转,该内容由特殊正交群中的旋转矩阵表示,表达式为:so(3)={r∈r3×3∣rtr=i,det(r)=1},其中,r3×3表示3×3维实矩阵,det(r)表示矩阵r行列式的值;so(3)表示三维旋转矩阵。
15、在一些实施例中,所述根据所述双向los向量以及航天器角速度,计算控制输入这一步骤中,还包括:
16、构建惯性坐标系下的所述主、服务航天器到从航天器的los向量ui,k,以及从航天器到主、服务航天器的los向量vk,i的表达式:
17、
18、其中,rc,k表示第k个从航天器坐标系相对于主航天器坐标系的旋转矩阵;rk表示第k个从航天器坐标系相对于惯性坐标系的旋转矩阵;sk,i表示vk,i与ui,k在惯性坐标系下的表示。
19、在一些实施例中,所述根据所述双向los向量以及航天器角速度,计算控制输入这一步骤中,还包括:
20、根据姿态需求确定期望目标姿态;
21、推导控制输入,以使得时间趋近于无穷时,所述第k个从航天器坐标系相对于主航天器坐标系的旋转矩阵逐渐趋向并稳定于所述期望目标姿态,该过程的误差方程的表达式为:
22、
23、
24、其中,δk表示第k个从航天器的姿态误差;δk,1,δk,2分别表示msk姿态误差δk相对于ss1,ss2的误差分量;rb,k表示期望目标姿态。
25、在一些实施例中,用指数图表示所述旋转矩阵的无穷小变化,表达式为:
26、
27、其中,代表单位旋转向量;∈是一个无穷小正数;δr代表旋转矩阵r在∈趋于0时的无穷小变化量;r代表三维旋转矩阵;
28、对于每个从航天器的控制系统输入的表达式为:
29、uk=-kkωk-kk,1φk-kk,2ψl
30、其中,uk代表第k个从航天器的控制输入向量;kk代表第k个从航天器的角速度控制增益;ωk代表第k个从航天器的角速度向量;φk代表第k个从航天器在主航天器坐标系下的姿态角偏差;ψk第k个从航天器在服务航天器坐标系下的姿态角偏差。
31、在一些实施例中,通过李雅普诺夫函数对所述控制系统输入进行相关稳定性分析,该过程的表达式为:
32、
33、其中,v是李雅普诺夫函数的候选函数;ωk代表第k个从航天器的角速度向量;jk代表第k个从航天器的转动惯量;δk,1代表k个从航天器在主航天器坐标系下的姿态误差;δk,2代表k个从航天器在服务航天器坐标系下的姿态误差。
34、本发明实施例的另一方面还提供了一种基于阵列天线的微纳卫星编队多目标姿态控制系统,包括:
35、第一模块,用于初始化微纳卫星编队模型;其中所述微纳卫星编队包括一艘主航天器、一艘服务航天器、任意艘从航天器,形成主从式结构;
36、第二模块,用于利用mimo通讯技术与cdma技术计算双向los向量;
37、第三模块,用于根据所述双向los向量以及航天器角速度,计算控制输入,使得所述控制输入达到期望相对姿态,完成对所述微纳卫星编队的多目标姿态控制。
38、本发明实施例的另一方面还提供了一种电子设备,包括处理器以及存储器;
39、所述存储器用于存储程序;
40、所述处理器执行所述程序实现如前面所述的方法。
41、为实现上述目的,本发明实施例的另一方面提出了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现前面所述的方法。
42、本发明实施例还公开了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器可以从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行前面的方法。
43、本发明实施例至少包括以下有益效果:本发明提供一种基于阵列天线的微纳卫星编队多目标姿态控制方法及系统,该方法首先初始化微纳卫星编队模型;其中所述微纳卫星编队包括一艘主航天器、一艘服务航天器、任意艘从航天器,形成主从式结构;然后利用mimo通讯技术与cdma技术计算双向los向量;最后根据所述双向los向量以及航天器角速度,计算控制输入,使得所述控制输入达到期望相对姿态,完成对所述微纳卫星编队的多目标姿态控制。本发明减少了对高精度传感器的依赖,降低了成本,同时也提高了系统的可靠性和灵活性,可以实现微纳卫星编队中各卫星的精确姿态控制。
- 还没有人留言评论。精彩留言会获得点赞!