一种两轴运动飞行器测试装置、测试方法及全自动工作站与流程
本发明涉及飞行器测试领域,更具体地说,它涉及一种两轴运动飞行器测试装置、测试方法及全自动工作站。
背景技术:
1、飞行器的偏航、滚角、俯仰测试是确保飞行器稳定性和操控性的重要环节。在进行这些测试时,飞行器的姿态角包括偏航角、俯仰角和滚转角,它们分别描述了飞行器相对于地面坐标系的旋转状态。
2、现有技术中的飞行器测试大多用三轴运动装置或五轴运动装置等多轴测试装置实现,随着轴的增加,测试装置的噪声干扰更为复杂多变,难以准确识别飞行器的性能参数;此外,飞行器测试过程中的传输也会影响到响应延迟的测试,同样会影响到飞行器的性能参数测试准确性。
3、因此,如何研究设计一种能够克服上述缺陷的两轴运动飞行器测试装置、测试方法及全自动工作站是我们目前急需解决的问题。
技术实现思路
1、为解决现有技术中的不足,本发明的目的是提供一种两轴运动飞行器测试装置、测试方法及全自动工作站,通过两轴的测试装置实现行器测试,基于角度参数生成相应测试参数随时间变化的测试响应线中的噪声干扰相对简单,再将测试响应线与测试基准线对比分析,不仅可以准确测试飞行器响应的稳定性,也可以准确测试飞行器内部器件的异常情况。
2、本发明的上述技术目的是通过以下技术方案得以实现的:
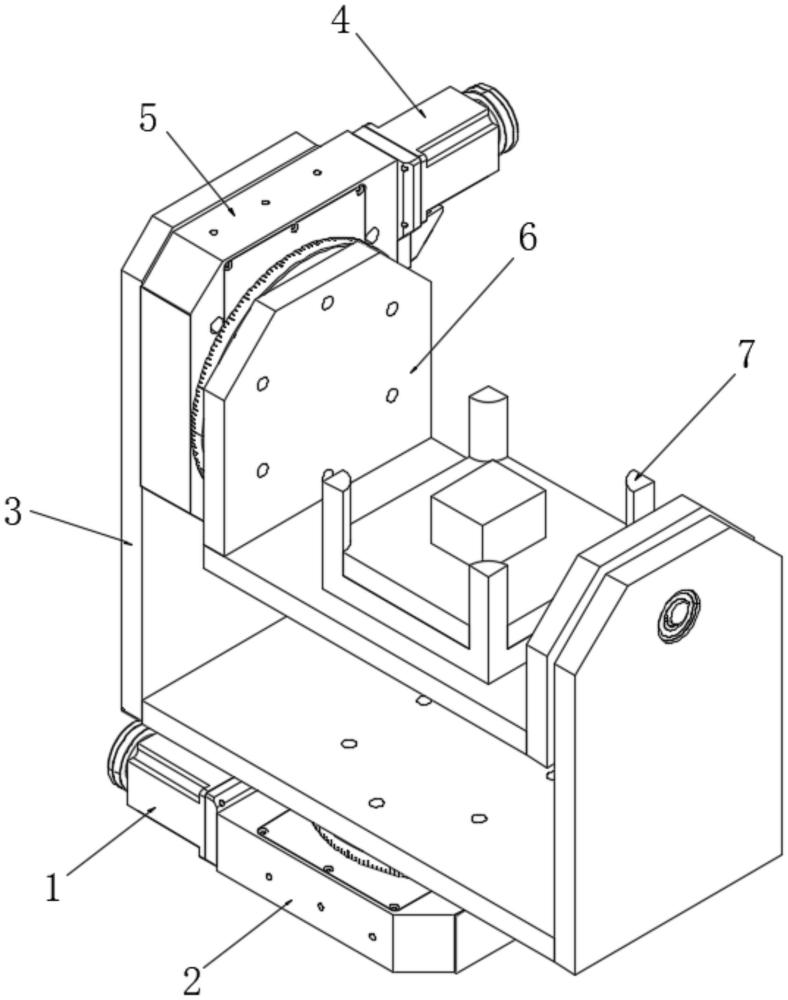
3、第一方面,提供了一种两轴运动飞行器测试装置,包括回转机构、摆动机构、工件固定座和控制模块;
4、所述工件固定座固定安装在摆动机构上,摆动机构安装在回转机构上;
5、所述摆动机构的摆动轴线与回转机构的回转轴线在三维空间中相互垂直;
6、所述控制模块与摆动轴线、回转机构均电连接,用于:
7、根据输入的测试指令控制回转机构和/或摆动机构启闭;
8、将测试指令解析成相应测试参数随时间变化的测试基准线;
9、采集回转机构和/或摆动机构运行过程中的角度参数,并基于角度参数生成相应测试参数随时间变化的测试响应线;
10、将测试响应线与测试基准线对比分析后得到飞行器的测试结果。
11、进一步的,所述回转机构包括回转伺服电机、回转涡轮涡杆和第一u型座;
12、所述摆动机构安装第一u型座的内侧;
13、其中,所述回转伺服电机响应于测试指令后,通过回转涡轮涡杆驱使第一u型座围绕回转轴线转动,以实现驱动摆动机构整体转动。
14、进一步的,所述摆动机构包括摆动伺服电机、摆动涡轮涡杆和第二u型座;
15、所述工件固定座安装在第二u型座的内侧底面;
16、其中,所述摆动伺服电机响应于测试指令后,通过摆动涡轮涡杆驱使第二u型座围绕摆动轴线转动,以实现驱动工件固定座整体转动。
17、第二方面,提供了如第一方面中任意一项所述的一种两轴运动飞行器测试装置的测试方法,包括以下步骤:
18、s1:将待测试工件固定安装在工件固定座上;
19、s2:将测试指令输入至控制模块,控制模块根据输入的测试指令控制回转机构和/或摆动机构启闭;
20、s3:将测试指令解析成相应测试参数随时间变化的测试基准线;
21、s4:采集回转机构和/或摆动机构运行过程中的角度参数,并基于角度参数生成相应测试参数随时间变化的测试响应线;
22、s5:将测试响应线与测试基准线对比分析后得到飞行器的测试结果。
23、进一步的,所述测试参数为偏航、俯仰、滚动、x加表中的任意组合。
24、进一步的,所述基于角度参数生成相应测试参数随时间变化的测试响应线的过程具体为:
25、以角度参数为纵坐标、时间为横坐标建立初步响应线;
26、对初步响应线去噪处理后得到测试响应线。
27、进一步的,所述对初步响应线去噪处理的过程具体为:
28、检测初步响应线中的噪声段,噪声段的检测条件包括:以噪声段两端点之间的连线作为趋势线,噪声段与趋势线相交后构成波峰特征和波谷特征,且波峰特征相对于趋势线的第一累积偏差绝对值与波谷特征相对于趋势线的第二累积偏差绝对值之差小于设定阈值;
29、以趋势线替代噪声段实现初步响应线去噪处理。
30、进一步的,所述将测试响应线与测试基准线对比分析的过程具体为:
31、计算测试响应线与测试基准线之间在不同角度值所对应的时间延迟;
32、选取在所有时间延迟中具有最大占比的共同时间延迟作为测试响应线与测试基准线之间的测试延迟,最大占比不低于设定占比;若最大占比低于设定占比,则测试结果为不合格;
33、判定多个测试参数所对应的测试延迟是否一致;若一致,则测试结果为合格;若不一致,则测试结果为不合格。
34、进一步的,该方法还包括:
35、检测测试响应线中是否存在异常特征,异常特征分为凸起特征和凹陷特征;
36、若存在异常特征,则测试结果为不合格。
37、第三方面,提供了一种全自动工作站,包括物料输送线体、机器人和如第一方面任意一项所述的一种两轴运动飞行器测试装置;
38、所述物料输送线体包括来料输送线体、合格产品输送线体、不合格产品暂存台;
39、其中,来料输送线体将装有待测试工件的工件托盘先传送至相机拍照位,相机拍照后,来料输送线体继续将装有待测试工件的工件托盘传送至机器人抓取位,同时相机拍照后将照片传送给软件分析系统,软件分析系统根据照片分析工件托盘上有无待测试工件、待测试工件外观是否合格及待测试工件规格型号和编号;
40、工件托盘上无待测试工件或待测试工件外观是不合格时,机器人直接将无待测试工件或待测试工件外观不合格的工件托盘放于不合格产品暂存台,工件托盘上有外观合格待测试工件且飞行器测试装置上无工件托盘时,机器人将工件托盘放于飞行器测试装置;
41、机器人将经飞行器测试装置测试且软件分析系统判定合格的产品放入合格产品输送线体,合格产品输送线体将产品输入下一工序。
42、与现有技术相比,本发明具有以下有益效果:
43、1、本发明提供的一种两轴运动飞行器测试装置,通过两轴的测试装置实现行器测试,基于角度参数生成相应测试参数随时间变化的测试响应线中的噪声干扰相对简单,再将测试响应线与测试基准线对比分析,不仅可以准确测试飞行器响应的稳定性,也可以准确测试飞行器内部器件的异常情况;
44、2、本发明将摆动机构安装第一u型座的内侧,工件固定座安装在第二u型座的内侧底面,可以减少整个测试装置的占用空间;
45、3、本发明将多个测试参数所对应的测试延迟进行一致性判定,测试过程无需考虑传输延迟对测试准确度的影响;
46、4、本发明以噪声段两端点之间的连线作为趋势线,噪声段与趋势线相交后构成波峰特征和波谷特征,且波峰特征相对于趋势线的第一累积偏差绝对值与波谷特征相对于趋势线的第二累积偏差绝对值之差小于设定阈值的条件来检查噪声段,可以保障所获得测试响应线的准确性,同时可以避免异常情况造成的数据波动因被视为噪声而消除的情况发生,有效提高了所获得测试响应线的可靠性。
- 还没有人留言评论。精彩留言会获得点赞!