局部磁控式飞走巡检机器人线上位姿调节装置及方法
本发明涉及局部磁控式飞走巡检机器人线上位姿调节装置及方法,属于高压输电线巡检机器人线上姿态控制。
背景技术:
1、高压输电线路作为电力传输的重要方式,需要定期进行巡检以确保安全运行。目前采用人工和机器人巡检两种方式,其中机器人巡检更安全高效。巡检机器人配备各种传感器和设备,能够快速准确地发现线路问题,及时修复,确保电力系统稳定供电。这种技术应用的普及将提升输电线路巡检效率,解决人力资源不足和环境限制问题,确保电力供应的可靠性和稳定性。然而,巡检过程中,电力巡检机器人可能会遇到复杂的工况,如风摆、弧垂等影响。风摆是指在风力作用下机器人产生的摆动,可能导致其失去平衡,影响巡检精度和效率;弧垂是指输电线在自重和外力作用下产生的下垂弧度,机器人需不断调整姿态以适应这种变化。此外,还可能遇到塔头、防震锤、金具等障碍物,需要机器人在行走和飞行模式间频繁切换。受结构限制,风扰过大会导致机器人在线上摆动,所以根据不同环境,通过姿态控制来研究机器人稳定性显得尤为重要。
2、巡检机器人的安全性和稳定性是保障巡检工作顺利且有效进行的关键因素。在实际巡检线路中存在多种障碍,如塔头、防震锤、金具等。飞走巡检机器人需要在沿线行走和飞行越障的模式之间频繁切换,同时在巡检过程中应对各种环境和电力线路的变化。受机器人结构限制,在巡检行走过程中,当风扰过大会导致巡检机器人不受控制的产生线上的摆动。由于除了行走机构与压紧机构再无其他可控机构,如果不采取线上姿态控制,会极大程度的影响巡检机器人的稳定性和安全性,导致巡检任务失败甚至是机器人从线上掉落,不符合电力线巡检工作的安全稳定要求。
3、中国专利cn202211742009.0中提到一种巡检机器人,通过电动伸缩杆和压滚轮将机器人固定在输电线底部,形成“w”字形状,防止吊滚轮打滑,但无法应对输电线和机器人扰动情况,影响效率。中国专利cn201922355659.x中提出,通过铰座和连接柱相对位移避免机器人晃动,但连接杆和轴杆可能因长期使用而疲劳失效,影响稳定性和寿命,因此,需要研究灵活调控的方法,不依赖固定结构。中国专利cn202111594855.8中描述了一种结合飞行和爬行功能的机器人,但缺乏抗风扰控制,仅调整螺旋桨改变飞行方向,稳定性不足,需研究维持稳定性的控制方法。
4、针对具有飞行和行走两种模式的电力线巡检机器人,由于其工作环境要求机器不宜过重,除了彻底改进机械结构外,可通过小范围的结构改进和辅助控制程序来实现在线上巡检过程中的偏转调控。采用轻质材料和轻型化设计可降低整体重量,增加灵活性和响应速度。此外,在关键部位增加精密传感器和执行器,通过实时监测和调节姿态,提高机器人的稳定性和控制性能,从而有效应对复杂工作环境下的巡检需求。
5、因此为提高飞走电力机器人安全性能和上线稳定性,降低整体结构修改所耗费的成本,需要对其在线上巡检过程中发生的偏转问题采用更为合适的监测及控制方法,所以我们提出了一种局部磁控式飞走巡检机器人线上位姿调节装置及方法。
技术实现思路
1、本发明的主要目的在于提出局部磁控式飞走巡检机器人线上位姿调节装置及方法,旨在解决飞走巡检机器人在线上巡检过程中由于环境因素而产生偏转导致的稳定性不足问题,达到可以微调以及增强两种方式控制飞走巡检机器人在线上行走时的偏转角度,消除飞走巡检机器人线上巡检出现左右、前后乃至斜向摆动的缺点,优化其巡检稳定性。
2、为实现上述目的,本发明提供如下技术方案:
3、提出局部磁控式飞走巡检机器人线上位姿调节装置及方法:飞走电力巡检机器人正常运行,当其降落至电力线后,飞走电力巡检机器人采用旋翼可调节控制方法,包括微调与增强两种控制模式对巡检状态机器人的平衡进行处理;之后在飞走电力巡检机器人正常沿线行走过程中,需要时刻监测机器人的姿态状态并对此做出线上行走时偏角控制的调整处理;
4、局部磁控式飞走巡检机器人线上位姿调节装置,基于一种飞走电力巡检机器人,包含飞行单元、行走单元、监测单元、控制单元和电源单元。所述飞行单元包括:六个机臂、六个旋翼(203)、旋翼电机驱动器、旋翼电机(412);所述行走单元包括:支架(201)、挂线臂(204)、行走轮(205)、压紧轮(206);所述监测单元包括:总控制板(401)、中机舱(202)、惯性感测单元(402)、电流传感器(403)、磁感应计(404)、光电传感器、机载全球定位仪(gps)、数据传输器、图像传输器和温度传感器;所述控制单元包括:总控制板(401)、差速器单元、六个线上位姿调节装置(207);所述电源单元包括:各单元供电锂电池;所述惯性感测单元(402)包括:加速度计、陀螺仪、磁力计、倾角传感器;所述六个线上位姿调节装置(207)包括:磁环线圈(413)、磁控平衡球1(406)、磁控平衡球2(407)、磁控平衡球3(408)、磁控平衡球4(409)、磁控平衡球5(410)、磁控平衡球6(411)及其所对应的磁场发生器(405);所述总控制板(401)既属于监测单元,也属于控制单元;
5、进一步,所述机臂以所述中机舱(202)为中心对称布置,每个机臂分为旋翼前臂(301)与旋翼后臂(302),包括线上位姿调节装置(207),并在末端安装所述的旋翼(203)和旋翼电机(412);
6、进一步,所述支架安装在所述中机舱(202)下表面,所述单元供电锂电池安装于支架上;
7、进一步,所述挂线臂(204)底端安装在所述中机舱(202)上表面,所述行走轮(205)安装在所述挂线臂(204)的上端,所述行走轮(205)由安装于行走轮(205)内部的行走电机驱动,所述压紧轮(206)安装在所述行走轮(205)的两端,所述压紧轮(206)由行走轮(205)带动驱动;
8、进一步,所述惯性感测单元(402)、机载全球定位仪(gps)、数据传输器、图像传输器和温度传感器安装于所述中机舱(202)上表面;
9、进一步,所述电流传感器(403)、磁感应计(404)、光电传感器、差速器单元安装于中机舱(202)舱内与各机臂相连处;
10、进一步,所述磁控平衡球安装在各机臂碳管内部且与旋翼电机(412)支架碳管相连,所述磁场发生器(405)安装在各机臂外表面且相邻磁控平衡球;
11、进一步,所述磁控平衡球1(406)、磁控平衡球2(407)、磁控平衡球3(408)、磁控平衡球4(409)、磁控平衡球5(410)、磁控平衡球6(411),其分布情况为磁控平衡球1(406)与磁控平衡球4(409)位于机体自身坐标系x’轴上,磁控平衡球2(407)、磁控平衡球3(408)、磁控平衡球5(410)、磁控平衡球6(411)位于y’轴两侧;
12、进一步,所述磁环线圈(413)安装在每个磁控平衡球的周围,位于各机臂碳管内部;
13、进一步,所述旋翼电机驱动器、行走电机驱动器、总控制板(401)安装于中机舱(202)内,所述温度传感器安装于所述旋翼电机(412)和所述行走电机驱动器上表面;
14、进一步,所述总控制板(401)用于向飞走电力机器人的各个子系统发送控制信号,包括姿态控制、电流控制、磁场控制,并通过监测单元对监测数据进行实时处理和决策,还用于行走电机驱动器、旋翼电机驱动器以及其他传感器的控制。
15、局部磁控式飞走巡检机器人线上位姿调节方法,其特征在于:该方法包括以下步骤:
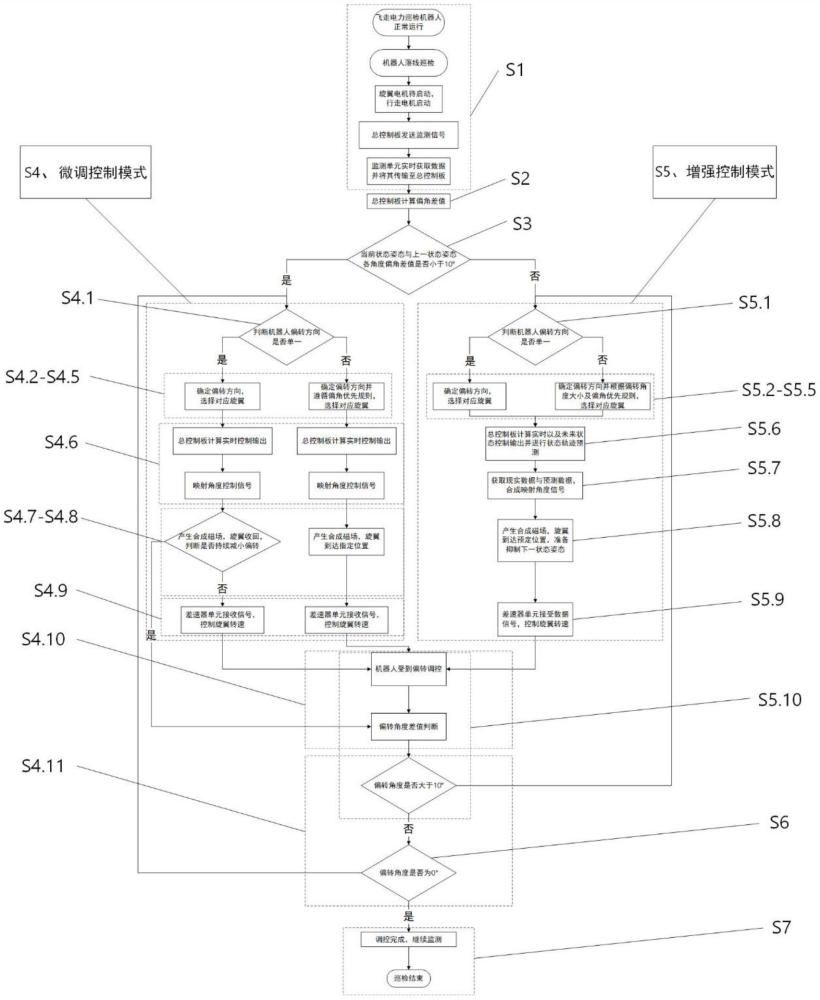
16、步骤s1:飞走巡检机器人处于正常线上巡检状态,当降落至电力线并开始行走后,总控制板(401)发送监测信号,监测单元实时监测飞走电力巡检机器人姿态以及运动状态并将监测数据传输至总控制板(401),其中监测数据包括当前机器人的偏转角度、电流强度、磁场强度及方向;
17、步骤s2:总控制板(401)通过监测单元,获取当前状态姿态current,并计算此时与上一状态previous姿态的偏角差值,包括俯仰角差值θd、横滚角差值φd、偏航角差值ψd,该过程偏角计算公式如下:
18、
19、ψ=ψprevious+ωz·dt
20、其中,ax、ay和az分别是机器人在x、y和z轴上的加速度;ωz是机器人绕垂直方向的角速度,dt是时间的微小增量;
21、θd=θcurrent-θprevious,φd=φcurrent-φprevious,ψd=ψcurrent-ψprevious
22、步骤s3:判断俯仰角θ、横滚角φ、偏航角ψ与上一状态姿态各角度差值,即θd、φd、ψd是否小于10度,是则执行步骤s4,否则执行步骤s5;
23、步骤s4:总控制板(401)选择微调控制模式,所述模式包括步骤s4.1至步骤s4.11;
24、步骤s4.1:总控制板(401)根据当前状态姿态与上一状态姿态的偏角差值,并结合偏转角误差范围±5度,计算飞走电力巡检机器人的实时控制输出;
25、
26、若单一偏角差值超出误差范围但小于10度,则属于单一偏转;若两种或三种偏角差值超出误差范围但小于10度,则属于混合偏转;
27、步骤s4.2:当检测到俯仰角偏转时,线上位姿调节装置(207)产生合成磁场,调控x’轴方向的磁控平衡球围绕y’轴顺时针或逆时针旋转,带动其对应的一对旋翼(203)移动至指定位置,旋翼(203)到达指定位置后,会改变机器人的重心,从而通过重心的调整逐步修正姿态。在此过程中,系统通过重心的微调使机器人逐步恢复到平衡状态。若偏转角度较大,则旋翼(203)在新的指定位置继续受到磁场调控,通过重心调整和旋翼叶片受风扰的作用改变姿态。此时,该对旋翼中的某一旋翼叶片正对风扰方向以增大受力面积,通过旋翼(203)的连续旋转,逐步恢复俯仰角至设定范围内,机器人回到稳定状态;
28、当检测到横滚角偏转时,线上位姿调节装置(207)产生合成磁场,调控-y’轴或者y轴两侧的磁控平衡球旋转,带动其对应的旋翼(203)移动至指定位置,通过重心调整或者旋翼叶片受风扰的作用改变姿态,减小横滚角偏差,使机器人回到稳定状态;
29、当检测到偏航角偏转时,线上位姿调节装置(207)产生合成磁场,沿x轴方向距离最近的一对线上位姿调节装置(207)将被激活,其装置中的磁控平衡球会围绕该旋翼(203)自身轴进行旋转,带动其对应的一对旋翼(203)移动至指定位置,使其中一个旋翼叶片正对风扰方向,增大受力面积,通过重心调整或者旋翼叶片受风扰的作用改变姿态,减小偏航角偏差,使机器人回到稳定状态;
30、步骤s4.3:当飞走电力巡检机器人偏转方向为上述三种方向任意两种相结合时,即混合偏转,则线上位姿调节装置(207)需要依次获取两种调节磁场方向,即线上位姿调节装置(207)需要根据机器人目前偏转中的某一方向优先解决该方向的偏转问题,然后解决另一方向的偏转问题;由于俯仰角和横滚角之间的耦合度较高,先处理俯仰角可以减少对横滚角调整的影响,随后调整横滚角可以在更稳定的前提下进行,偏航角的调整对俯仰角和横滚角的影响较小,故放在最后处理;
31、步骤s4.4:在处理混合偏转时,每次调整后,系统将实时检测当前偏角差值,确保调整后的角度差值在允许的误差范围内,偏航角的调整将在俯仰角和横滚角调整后处理,依次判断各方向的偏转是否已被修正,必要时重新判断进行进一步调整;
32、步骤s4.5:当飞走电力巡检机器人偏转方向为上述三种方向相结合时,根据上述偏转角优先解决顺序,依次为俯仰角、横滚角、偏航角;
33、步骤s4.6:总控制板(401)根据俯仰角θ、横滚角φ、偏航角ψ信息,通过偏角转换函数,即偏角到磁场强度及方向的线性映射函数,将角度映射至磁场发生器(405)的控制信号范围内,控制信号由如下公式计算:
34、
35、其中,aθ,aφ,aψ为每个偏角的线性增益系数,用于初步放大偏角差值;
36、bθ,bφ,bψ为每个偏角的非线性增益系数,用于非线性放大偏角差值,增强对较大偏角的控制;cθ,cφ,cψ:为每个偏角的平方项系数,用于调整偏角差值的二次效应;dθ,dφ,dψ为每个偏角的立方项系数,用于调整偏角差值的三次效应;
37、步骤s4.7:根据优先方向以及所需磁场方向和电流传感器(403)所监测到的线上位姿调节装置(207)的电流强度,根据上述控制信号调节该电流值,以此控制磁场发生器(405)的工作状态;通过磁场合成技术,即调整磁场发生器(405)中每个磁场源的工作状态,磁场发生器(405)随即产生相应的合成磁场;
38、步骤s4.8:若为单一偏转,旋翼(203)在一定范围内收回后判断此时飞走电力机器人的偏转情况是否有所改善且持续削弱,若是则直接执行步骤s4.11,否则执行步骤s4.9;
39、步骤s4.9:总控制板(401)通过当前状态的合成磁场,直接调控旋翼(203)的旋转状态,旋翼在合成磁场的作用下进入目标位置,旋翼叶片正对风扰方向,通过风扰作用逐步调节姿态。在此过程中,旋翼叶片与风的相互作用产生的力逐步纠正机器人的姿态偏差;
40、步骤s4.10:各方向相对应的磁控平衡球受到磁场发生器(405)所产生的合成磁场的影响,旋转至目标位置α或β,此时对偏转角度差值进行再判断;
41、步骤s4.11:若偏转角度大于10度,则执行步骤s5;若偏转角度大于0度且小于10度,则执行步骤s4;若偏转角度为0度,则执行s7;
42、步骤s5:总控制板(401)选择增强控制模式,所述模式包括步骤s5.1至步骤s5.10;
43、步骤s5.1:总控制板(401)根据当前状态姿态与上一状态姿态的偏角差值,并结合偏转角误差范围±5度,计算飞走电力巡检机器人的实时控制输出;
44、若单一偏角差值大于10度且未超出误差范围±5度,则属于单一偏转;若两种或三种偏角差值大于10度且超出误差范围±5度,则属于混合偏转;
45、步骤s5.2:当检测到俯仰角偏转时,线上位姿调节装置(207)产生合成磁场,调控x’轴方向的磁控平衡球围绕y’轴顺时针或逆时针旋转,带动其对应的一对旋翼(203)移动至指定位置,旋翼(203)到达指定位置后,会改变机器人的重心,从而通过重心的调整逐步修正姿态。在此过程中,系统通过重心的微调使机器人逐步恢复到平衡状态。若偏转角度较大,则旋翼(203)在新的指定位置继续受到磁场调控,通过重心调整和旋翼叶片受风扰的作用改变姿态。此时,该对旋翼中的某一旋翼叶片正对风扰方向以增大受力面积,通过旋翼(203)的连续旋转,逐步恢复俯仰角至设定范围内,机器人回到稳定状态;
46、当检测到横滚角偏转时,线上位姿调节装置(207)产生合成磁场,调控-y’轴或者y轴两侧的磁控平衡球旋转,带动其对应的旋翼(203)移动至指定位置,通过重心调整或者旋翼叶片受风扰的作用改变姿态,减小横滚角偏差,使机器人回到稳定状态;
47、当检测到偏航角偏转时,线上位姿调节装置(207)产生合成磁场,沿x轴方向距离最近的一对线上位姿调节装置(207)将被激活,其装置中的磁控平衡球会围绕该旋翼(203)自身轴进行旋转,带动其对应的一对旋翼(203)移动至指定位置,使其中一个旋翼叶片正对风扰方向,增大受力面积,通过重心调整或者旋翼叶片受风扰的作用改变姿态,减小偏航角偏差,使机器人回到稳定状态;
48、步骤s5.3:当飞走电力巡检机器人偏转方向为上述三种方向任意两种相结合时,即混合偏转,则线上位姿调节装置(207)需要依次获取两种调节磁场方向,即线上位姿调节装置(207)需要根据机器人目前偏转中的某一方向优先解决该方向的偏转问题,然后解决另一方向的偏转问题;由于俯仰角和横滚角之间的耦合度较高,先处理俯仰角可以减少对横滚角调整的影响,随后调整横滚角可以在更稳定的前提下进行,偏航角的调整对俯仰角和横滚角的影响较小,故放在最后处理;
49、步骤s5.4:在处理混合偏转时,每次调整后,系统将实时检测当前偏角差值,确保调整后的角度差值在允许的误差范围内,偏航角的调整将在俯仰角和横滚角调整后处理,依次判断各方向的偏转是否已被修正,必要时重新判断进行进一步调整;
50、步骤s5.5:当飞走电力巡检机器人偏转方向为上述三种方向相结合时,根据上述偏转角优先解决顺序,依次为俯仰角、横滚角、偏航角;
51、步骤s5.6:当前状态姿态与上一状态姿态的差值大于10度时,总控制板(401)基于现阶段姿态采用模型预测控制mpc进行状态轨迹预测,在预测的状态轨迹上根据最大化效率优化控制序列u0,u1,...,ut-1,获取该序列中的第一个控制指令信息u0执行当前控制,即未来下一状态姿态的俯仰角θ、横滚角φ、偏航角ψ信息;通过信息计算飞走电力巡检机器人的未来状态控制输出;
52、状态轨迹预测模型如下:
53、xt+1=axt+but+ωt
54、其中,xt是当前状态,ut是控制输入,ωt是过程噪声;
55、优化控制输入ut以最小化成本函数如下:
56、
57、其中,q,r,p是权重矩阵;
58、约束条件如下:
59、
60、步骤s5.7:根据现阶段状态输出信息和未来状态输出信息,通过偏角转换函数,即偏角到磁场方向的线性映射函数,提前预测并将角度映射至磁场发生器(405)的控制信号范围内;
61、步骤s5.8:根据所预测的磁场方向和所需电流强度,通过磁场合成技术,调整每个磁场源的工作状态,磁场发生器(405)随即产生相应的合成磁场;各方向相对应的磁控平衡球受到磁场发生器(405)所产生的合成磁场的影响,提前进行调控,抑制机器人下一状态姿态的三种偏转角度;
62、步骤s5.9:根据现阶段状态输出信息和未来状态输出信息,总控制板(401)通过预测的合成磁场,直接调控旋翼(203)的旋转状态,旋翼在合成磁场的作用下进入目标位置,旋翼叶片正对风扰方向,通过风扰作用逐步调节姿态。在此过程中,旋翼叶片与风的相互作用产生的力逐步纠正机器人的姿态偏差;
63、步骤s5.10:磁控平衡球旋转至目标位置α或β,通过预测控制抑制飞走电力巡检机器人的偏转完成,其避免线上大幅度的偏转;监测单元继续实时监测飞走电力巡检机器人运动状态直至该姿态与初始姿态角度差值小于10度,若未能使偏转差值小于10度,则反复执行s5;
64、步骤s6:当差值小于10度时,切换至步骤s4微调控制模式;
65、步骤s7:飞走电力巡检机器人调控完成,若继续工作则继续监测,直至巡检结束。
66、与现有技术相比,本发明具有如下优势:
67、采用了机器人线上位姿调节装置及方法和多传感器实时监测系统,能够实时获取并控制飞走电力巡检机器人的姿态状态;通过即时响应机器人姿态变化,并进行角度调整,有效提升了机器人在复杂环境中的稳定性,确保了其在电力线上的稳定行走;
68、引入了较小比例增益的姿态控制算法,包括模型预测控制,能够根据机器人当前姿态与目标姿态之间的差值进行智能化的控制输出,这种智能控制能够更准确地调整机器人的动作,提高了机器人的响应速度和稳定性;
69、采用多传感器系统对机器人的姿态和运动状态进行实时监测,并通过反馈控制算法实时调整,使得机器人能够迅速适应复杂环境的变化,这种实时性的监测和反馈有助于及时纠正姿态偏差,提高了机器人的线上巡检效率和安全性。
- 还没有人留言评论。精彩留言会获得点赞!