一种可适应高空飞行的耐低温氢能无人机系统的制作方法
本发明涉及无人机,特别涉及一种可适应高空飞行的耐低温氢能无人机系统。
背景技术:
1、无人驾驶飞机(unmannedaerialvehicle,uav)简称无人机,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。随着无人机行业的发展,无人机作为工具被越来越广泛的使用在很多领域。现如今无人机已经在农业、军事、工业等方面起到了重要的作用。但目前以锂电池为供电能源的无人机的续航时间过短,这一缺陷极大地限制了其应用。利用氢能作为无人机动力来源,可大幅提升其续航能力,且氢能是一种清洁能源,更加绿色环保。
2、燃料电池是利用氢气与氧气反应,将化学能转化成电能的清洁动力系统。海拔高度每上升1000米,大气气压下降10kpa左右,氧气浓度下降1.5%,温度下降6.5℃。空冷型燃料电池应用于无人机,在高空飞行时,由于氧气浓度与环境温度的双重下降,会导致燃料电池性能大幅衰减。
3、专利cn107585316a公开了一种用于高空无人机的新能源混合供电系统,其通过配备液氧罐作为氧源,在高空飞行(飞行高度大于8km)时作为燃料电池的氧源,以应对高空飞行缺氧的问题。但其存在如下不足:(1)飞行高度较高,但未大于8km时,也可能存在供氧不足的问题,但其无相关的应对方案;其不同的高度氧气含量不同,其无法依据高度对供氧进行细化调整;(2)增加液氧罐作为氧源会增大负载,从而增大无人机的消耗,影响续航;且当飞行高度始终不大于8km或是飞行高度大于8km的行程较短时,在其余燃料耗尽的情况下,氧源可能还有大量剩余,这造成了负载的浪费。
4、专利cn110993986a公开了一种空冷燃料电池高空环境适应性调节装置,其通过涡轮增压风扇提升空冷型燃料电池阴极空气的工作压力,从而增加阴极的供氧浓度与温度。但仅通过增大空气进气量来增大供氧,效果有限,尤其是氧浓度下降较大或温度下降较大的情况。
5、所以,现在有必要对现有技术进行改进,以提供更可靠的方案。
技术实现思路
1、本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种可适应高空飞行的耐低温氢能无人机系统。
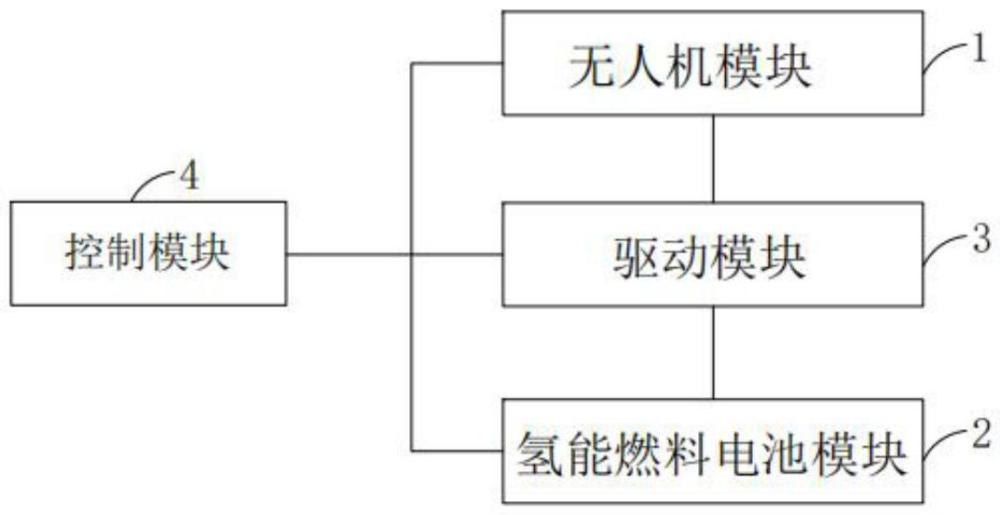
2、为解决上述技术问题,本发明采用的技术方案是:一种可适应高空飞行的耐低温氢能无人机系统,包括无人机本体、氢能燃料电池模块、驱动模块以及控制模块;
3、所述氢能燃料电池模块通过氢气和氧气产生电能并提供至驱动模块,通过所述驱动模块驱动无人机本体进行飞行;
4、所述控制模块根据无人机本体的飞行高度、飞行环境温度、储氢瓶内的剩余氢含量对氢能燃料电池模块进行控制,使氢能燃料电池模块采用以下模式中的一种进行工作:智能高空供氧模式、减重续航模式、抗低温模式。
5、优选的是,所述氢能燃料电池模块包括:空冷型氢燃料电池、供氢单元、供空气单元、辅助供氧单元和换热器;
6、所述辅助供氧单元采用增压供氧方式、储氧瓶供氧方式中的一种或两种相结合。
7、其中,增压供氧方式可采用涡轮增压风机或涡轮增压风扇等设备实现,通过提高进气量来增加氧气的供应,以满足高空供氧的需求。
8、其中,储氧瓶供氧方式可采用辅助增加纯氧供给设备来辅助提供氧气,以满足高空氧气含量过低时的供氧的需求。
9、优选的是,供氢单元包括储氢瓶、用于将储氢瓶中的氢气输送至空冷型氢燃料电池的氢气入口的供氢管路、设置在所述供氢管路上的供氢电磁阀以及用于检测储氢瓶内压力的第一压力传感器;
10、供空气单元包括第一供空气管路、设置在所述第一供空气管路的入口端的空气入口风扇和温度传感器、设置在所述第一供空气管路上的供空气电磁阀、连接在所述第一供空气管路的出口端的换热器以及连接所述换热器至所述空冷型氢燃料电池的空气入口的第二供空气管路;第一供空气管路的出口端与换热器的冷媒入口连接,第二供空气管路的入口端与换热器的冷媒出口连接。
11、优选的是,所述第一供空气管路上设置有混合管段,所述辅助供氧单元采用储氧瓶供氧方式,所述辅助供氧单元包括储氧瓶、用于将储氧瓶中的氧气输送至所述混合管段的供氧管路、设置在所述供氧管路上的供氧电磁阀以及用于检测储氧瓶内压力的第二压力传感器。
12、优选的是,所述空冷型氢燃料电池上设置有尾气排放管,所述尾气排放管上并联连接有第一尾气支管和第二尾气支管,所述第一尾气支管和第二尾气支管上分别设置有第一尾气电磁阀和第二尾气电磁阀,所述第一尾气支管与所述换热器的热媒入口连接,所述换热器的热媒出口连通至外部环境,所述第二尾气支管连接至所述混合管段。
13、优选的是,在智能高空供氧模式、减重续航模式下,第一尾气电磁阀打开、第二尾气电磁阀关闭;在抗低温模式下,第一尾气电磁阀和第二尾气电磁阀均打开。
14、优选的是,所述控制模块控制氢能燃料电池模块进行工作的方法为:
15、s1、所述控制模块周期性获取如下参数,然后根据如下参数进行后续控制:
16、根据无人机本体上的gps模块获取当前飞行高度ht;
17、通过所述第一供空气管路上的温度传感器获取引入到氢能燃料电池模块中的空气的温度tt,将tt作为飞行环境温度;
18、根据第一压力传感器检测的储氢瓶内压力值以及储氢瓶的容积获取当前的剩余氢含量qsh2,并得到剩余氢比值η,η=剩余氢含量/储氢瓶初始的总储氢量;
19、从飞行开始到当前时间内,氢气平均消耗速率vth2,并计算得到满足氢气和氧气完全反应时相匹配的氧气消耗速率vto2;
20、根据第二压力传感器检测的储氧瓶内压力值以及储氧瓶的容积获取剩余氧含量qso2;
21、s2、当tt≥tmin,且η≥(1/4-3/4)时,tmin为预先设定的温度阈值;控制氢能燃料电池模块采用智能高空供氧模式工作;
22、s3、当tt≥tmin,且η<(1/4-3/4)时,控制氢能燃料电池模块采用减重续航模式工作;
23、s4、当tt<tmin时,控制氢能燃料电池模块采用抗低温模式工作。
24、优选的是,所述控制模块控制氢能燃料电池模块进行工作的方法为:
25、s1、所述控制模块周期性获取如下参数,然后根据如下参数进行后续控制:
26、根据无人机本体上的gps模块获取当前飞行高度ht;
27、通过所述第一供空气管路上的温度传感器获取引入到氢能燃料电池模块中的空气的温度tt,将tt作为飞行环境温度;
28、根据第一压力传感器检测的储氢瓶内压力值以及储氢瓶的容积获取当前的剩余氢含量qsh2,并得到剩余氢比值η,η=剩余氢含量/储氢瓶初始的总储氢量;
29、从飞行开始到当前时间内,氢气平均消耗速率vth2,并计算得到满足氢气和氧气完全反应时相匹配的氧气消耗速率vto2;
30、根据第二压力传感器检测的储氧瓶内压力值以及储氧瓶的容积获取剩余氧含量qso2;
31、s2、当tt≥tmin,且η≥(1/4-3/4)时,tmin为预先设定的温度阈值;控制氢能燃料电池模块采用智能高空供氧模式工作,具体步骤如下:
32、s2-1、先根据当前飞行高度ht,利用预先构建的氧气含量与海拔对照表获取当前高度的氧气含量,然后计算此时满足氧气供应速率为vto2时所需的空气供应速率vtar;
33、s2-2、若vtar≤maxvar,则通过控制空气入口风扇和供空气电磁阀,按照空气供应速率为vtar向氢能燃料电池模块中供应空气;maxvar为预先设定的空气供应速率阈值;
34、否则,按照空气供应速率为maxvar向氢能燃料电池模块中供应空气,同时使储氧瓶按照氧气供应速率为v'to2向氢能燃料电池模块中供应氧气;其中,根据当前高度的氧气含量计算对应空气供应速率为maxvar时,空气中的氧气的供应速率maxvo2;满足:v'to2=vto2-maxvo2;
35、s3、当tt≥tmin,且η<(1/4-3/4)时,控制氢能燃料电池模块采用减重续航模式工作,具体步骤如下:
36、s3-1、根据氢气平均消耗速率vth2和剩余氢含量qsh2计算得到预估剩余续航时间tx,tx=qsh2/vth2;再根据剩余氧含量qso2计算得到将剩余氧在tx时间内消耗完所对应的氧气消耗速率vtxo2,vtxo2=qso2/tx;
37、s3-2、控制使储氧瓶按照氧气供应速率为vtxo2向氢能燃料电池模块中供应氧气,同时按照空气供应速率为vtxar向氢能燃料电池模块中供应空气;其中,根据当前高度的氧气含量计算对应空气供应速率为vtxar时,空气中的氧气的供应速率vtxar-o2;则满足:vtxar-o2=vto2-vtxo2;若vtxar>maxvar,则采用maxvar代替vtxar;
38、s4、当tt<tmin时,控制氢能燃料电池模块采用抗低温模式工作,具体步骤如下:
39、s4-1、计算温差指标γt,
40、s4-2、控制按照预先设定的空气供应速率vbar向氢能燃料电池模块中供应空气;
41、s4-3、控制的第一尾气电磁阀和第二尾气电磁阀均打开,使第二尾气支管和第一尾气支管中的尾气流量比值为k1,其中,k1=γt×α,α为尾气比值修正系数,是预先确定的常数;
42、同时使储氧瓶按照氧气供应速率为vbo2向氢能燃料电池模块中供应氧气,其中,vbo2=β×vbar×k1,β为修正系数,是预先确定的常数。
43、优选的是,α=0.01-0.75。
44、优选的是,β=0.25-2。
45、本发明的有益效果是:
46、本发明提供了一种可适应高空飞行的耐低温氢能无人机系统,能够很好的应对高空飞行时存在的低温、低氧的问题,具有广阔的应用前景;
47、本发明的控制模块根据无人机的飞行环境以及自身状态,能够自主选择智能高空供氧模式、减重续航模式或抗低温模式进行工作;
48、智能高空供氧模式下能够依据飞行高度智能增大空气供应速率使得供给的氧气始终能够满足空冷型氢燃料电池的需求,从而能够保证燃料电池效率,减少燃料电池中氢气的损失;
49、减重续航模式下,能够减少为应当高空飞行而设置的储氧瓶对无人机能量带来的额外消耗,从而间接增加无人机的续航;
50、抗低温模式下,通过智能控制部分尾气的循环利用与辅助供氧单元的配合,能够更好的应对高空低温环境的飞行。
- 还没有人留言评论。精彩留言会获得点赞!