电梯的制动装置异常诊断系统的制作方法
1.本发明涉及一种电梯的制动装置异常诊断系统。
背景技术:
2.在专利文献1中记载了电梯的制动装置异常诊断系统的例子。制动装置异常诊断系统利用激光位移计来测定制动装置的推杆(plunger)的行程。制动装置异常诊断系统在测定出的行程达到阈值的情况下,将制动装置诊断为异常。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2015
‑
42892号公报
技术实现要素:
6.发明要解决的课题
7.然而,专利文献1的制动装置异常诊断系统根据针对推杆的行程而预先设定的固定的阈值来判定制动装置的异常。因此,制动装置异常诊断系统在判定为异常的阈值未知的情况下,无法诊断制动装置的异常。
8.本发明是为了解决这样的课题而完成的。本发明的目的在于提供能够根据诊断为异常的阈值为未知的数据来诊断制动装置的异常的异常诊断系统。
9.用于解决课题的手段
10.本发明的电梯的制动装置异常诊断系统具备:观测部,其在对电梯的轿厢进行制动的制动装置动作时,取得与制动装置的动作有关的动作数据;转换部,其将观测部所取得的动作数据转换为与制动装置的故障现象对应的状态数据;数据取得部,其取得对制动装置判定异常而得到的判定数据;学习部,其使用状态数据以及判定数据,通过有教师学习法来学习制动装置的异常的诊断模型;以及判定部,其根据转换部对观测部在学习部的学习之后所取得的动作数据进行转换而得到的状态数据,基于诊断模型来判定制动装置的异常。
11.本发明的电梯的制动装置异常诊断系统具备:观测部,其在对电梯的轿厢进行制动的制动装置动作时,取得与制动装置的动作有关的动作数据;转换部,其将观测部所取得的动作数据转换为与制动装置的故障现象对应的状态数据;学习部,其使用状态数据,通过无教师学习法来学习制动装置的异常的诊断模型;以及判定部,其根据转换部对观测部在学习部的学习之后所取得的动作数据进行转换而得到的状态数据,基于诊断模型来判定制动装置的异常。
12.发明效果
13.根据这些发明,制动装置异常诊断系统具备观测部、转换部、学习部和判定部。观测部在对电梯的轿厢进行制动的制动装置动作时,取得与制动装置的动作有关的动作数据。转换部将观测部所取得的动作数据转换为与制动装置的故障现象对应的状态数据。学
习部使用状态数据,通过有教师学习法或无教师学习法来学习制动装置的异常的诊断模型。判定部根据转换部对观测部在学习部的学习之后所取得的动作数据进行转换而得到的状态数据,根据诊断模型来判定制动装置的异常。由此,能够根据诊断为异常的阈值为未知的数据来诊断制动装置的异常。
附图说明
14.图1是实施方式1的制动装置异常诊断系统的结构图。
15.图2是示出实施方式1的制动装置异常诊断系统进行的异常诊断的例子的图。
16.图3是示出实施方式1的制动装置异常诊断系统的动作例的流程图。
17.图4是示出实施方式1的制动装置异常诊断系统的动作例的流程图。
18.图5是示出实施方式1的制动装置异常诊断系统进行的异常诊断的例子的图。
19.图6是示出实施方式1的制动装置异常诊断系统的主要部分的硬件结构的图。
具体实施方式
20.参照附图对用于实施本发明的方式进行说明。在各图中,对相同或相当的部分标注相同标号并适当简化或省略重复的说明。
21.实施方式1.
22.图1是实施方式1的制动装置异常诊断系统1的结构图。
23.制动装置异常诊断系统1应用于电梯2。
24.电梯2设置在建筑物3。建筑物3具有多个楼层。在电梯2中,井道4贯穿建筑物3的各个楼层。在电梯2中,层站5设置在建筑物3的各个楼层。各个楼层的层站5与井道4对置。在电梯2中,多个层站门6分别设置在各个楼层的层站5。电梯2具备曳引机7、主绳索8、对重9、轿厢10、制动装置11、控制盘12以及监视装置13。
25.曳引机7例如设置在井道4的上部。曳引机7具备电机和绳轮。曳引机7的电机是使绳轮旋转的装置。
26.主绳索8以能够追随曳引机7的绳轮的旋转而移动的方式绕挂于曳引机7的绳轮上。主绳索8的一端设置于轿厢10。主绳索8的另一端设置于对重9。
27.对重9设置成能够追随主绳索8的移动而在井道4的内部沿铅直方向行驶。
28.轿厢10设置成能够追随主绳索8的移动而在井道4的内部沿铅直方向行驶。轿厢10具备轿厢门14。轿厢门14是在轿厢10停靠在建筑物3的各个楼层中的任意楼层时进行开闭的装置。轿厢门14是使层站门6联动地进行开闭的装置。
29.制动装置11是在轿厢10停靠时对轿厢10进行制动的装置。制动装置11具备制动鼓15、制动靴16、线圈17、推杆18、弹簧19以及制动控制装置20。制动鼓15以能够与曳引机7的电机同步地旋转的方式设置于曳引机7的电机的输出轴。制动靴16与制动鼓15的外表面对置。制动靴16是通过借助摩擦力对制动鼓15的旋转进行制动来对轿厢10进行制动的设备。弹簧19是利用弹力将制动靴16按压于制动鼓15的设备。线圈17是通过通电而产生磁场的设备。推杆18是通过线圈17所产生的磁场使制动靴16以克服弹簧19的弹力离开制动鼓15的方式进行移位的设备。制动控制装置20是控制制动装置11的动作的装置。制动装置11的动作包括吸引和释放。制动控制装置20搭载有输出吸引指令以及释放指令的元件。吸引指令在
制动装置11对轿厢10进行制动时被输出。释放指令在制动装置11对轿厢10进行制动时被输出。制动装置11也可以具备将弹簧19的弹力传递到制动靴16的制动臂。
30.控制盘12例如设置在井道4的上部。控制盘12是控制电梯2的动作的装置。电梯2的动作例如包括轿厢10的行驶。控制盘12以能够控制电梯2的动作的方式与曳引机7以及制动装置11连接。
31.监视装置13例如设置在建筑物3。监视装置13是监视电梯2的动作的装置。监视装置13以能够对与电梯2的动作有关的数据进行通信的方式与控制盘12连接。
32.在电梯2中设有未图示的动作计测装置和环境计测装置。
33.动作计测装置是在制动装置11动作时取得动作计测数据的装置。动作计测数据是表示与制动装置11的动作有关的信息的多分量的数据。动作计测装置的一部分或全部例如设置于制动装置11、曳引机7或轿厢10。动作计测装置例如包括传感器、开关等。动作计测装置例如包括电流计、制动开关和编码器。
34.电流计例如设置于向线圈17供给电力的布线。电流计是测定向线圈17通电的电流的传感器。制动开关设置于制动装置11。制动开关是检测制动装置11的动作状态的开关。制动装置11的动作状态包括制动状态以及解除状态。制动开关例如具备通过检测制动装置11的一部分的机械性位移来检测制动装置11的动作状态的机构。编码器设置于曳引机7的电机。编码器是利用脉冲信号输出曳引机7的电机的旋转角的传感器。
35.动作计测数据的各分量的信息被输出至控制盘12。或者,动作计测数据的各分量的信息通过制动控制装置20而被输出至控制盘12。控制盘12将动作计测数据与信号数据以及计算数据一并作为动作数据以能够输出的方式进行存储。信号数据是表示有无控制信号的输入或输出的信息的多分量的数据。控制信号例如是制动电压指令、吸引指令、释放指令、制动电压指令以及制动触点信号。控制软件的变量也可以包含计算数据的信息。计算数据是根据动作计测数据以及信号数据等计算出的多分量的数据。
36.环境计测装置是取得环境计测数据的装置。环境计测数据是表示与制动装置11的动作环境有关的信息的多分量的数据。环境计测装置的一部分或全部例如设置于制动装置11、曳引机7或轿厢10。环境计测装置例如设置在井道4。多个环境计测装置例如包括秤和温度计。
37.秤设置于轿厢10。秤是测定乘坐于轿厢10的利用者等的重量的传感器。温度计设置于井道4。温度计例如是测定气温的传感器。温度计也可以设置于制动装置11。这时,温度计例如是测定制动装置11的温度的传感器。
38.环境计测数据的各分量的信息被输出至控制盘12。或者,环境计测数据的各分量的信息通过制动控制装置20而被输出至控制盘12。控制盘12以能够输出的方式存储环境计测数据。
39.在制动装置异常诊断系统1中,信息中心21例如设置在建筑物3的外部。信息中心21是收集电梯2及其他电梯的信息的据点。
40.制动装置异常诊断系统1是诊断制动装置11的异常的系统。另外,制动装置异常诊断系统1也可以具备预测制动装置11的劣化时期的功能。
41.制动装置异常诊断系统1具备数据服务器22、维护支援装置23以及显示装置24。
42.数据服务器22例如设置在信息中心21。数据服务器22以能够对电梯2的动作等的
信息进行通信的方式与监视装置13连接。数据服务器22具备观测数据存储部25、属性数据存储部26以及异常数据存储部27。
43.观测数据存储部25是存储观测数据库的部分。观测数据库包含多个观测数据。观测数据包括动作数据以及环境计测数据。
44.属性数据存储部26是存储属性数据库的部分。属性数据库包含多个属性数据。属性数据包含基于电梯属性的数据。此外,属性数据包含基于制动装置属性的数据。属性数据例如包含制动装置的机型、轿厢的装置重量、电梯的种类以及电梯的设置地域等信息。电梯的种类例如包括是否为观光用电梯等信息。电梯的种类例如与井道的环境相关联。电梯的种类例如与电梯的机型相关联。电梯的设置地域例如通过气候等而与井道的环境相关联。电梯的设置地域例如通过空气中的盐或硫等的浓度而与井道的环境相关联。
45.异常数据存储部27是存储异常历史记录数据库的部分。异常历史记录数据库包含与电梯2及其他电梯有关的多个判定数据。判定数据是判定制动装置11的异常而得到的数据。判定数据例如包括异常的有无、异常的种类以及异常的程度的信息。判定数据例如是与1个动作数据建立了对应的数据。
46.维护支援装置23例如设置在信息中心21。维护支援装置23具备观测部28、数据取得部29、分类部30、转换部31、学习部32、判定部33、生成部34、预测部35、存储部36和通知部37。
47.观测部28是在制动装置11动作时取得动作数据的部分。观测部28以能够取得包含动作数据的观测数据的方式与监视装置13连接。
48.数据取得部29是生成训练数据集的部分。训练数据集包括环境数据、动作数据以及判定数据的多个组。环境数据包括环境计测数据以及属性数据。数据取得部29以能够取得观测数据的方式与观测数据存储部25连接。数据取得部29以能够取得属性数据的方式与属性数据存储部26连接。数据取得部29以能够取得判定数据的方式与异常数据存储部27连接。
49.分类部30是根据环境数据对动作数据进行分类的部分。分类部30以能够取得动作数据的方式与观测部28连接。分类部30以能够取得环境计测数据以及属性数据作为环境数据的方式与观测部28以及属性数据存储部26连接。分类部30以能够取得训练数据集的方式与数据取得部29连接。
50.转换部31是将动作数据转换为状态数据以及指标数据的部分。
51.状态数据是多分量的数据。状态数据的各分量与制动装置11的各故障现象对应。制动装置11的各故障现象例如包括继电器开关的触点固定(固着)、弹簧19的劣化、制动靴16的位置偏移、制动装置11的制动能力降低、以及制动控制装置20的电子电路异常。
52.指标数据是表示制动装置11的劣化的数据。指标数据例如是表示每个预先设定的时间单位的劣化指标值的时序数据。劣化指标值是作为表示制动装置11的劣化的指标的值。劣化指标值也可以是多分量的值。制动装置11的劣化例如是制动靴16的磨损。制动装置11的劣化例如会使制动装置11的制动能力降低。制动装置11的制动能力的降低例如成为制动装置11产生打滑的主要原因。时序数据的时间单位例如是1天。转换部31以能够取得根据环境数据被分类后的动作数据的方式与分类部30连接。
53.学习部32是使用状态数据来学习制动装置11的异常的诊断模型的部分。学习部32
的学习方法是机器学习法。学习部32以能够取得状态数据的方式与转换部31连接。学习部32进行的学习例如通过信息中心21的操作员进行的开始学习的操作来进行。
54.判定部33是如下部分:根据转换部31对观测部28在学习部32进行的学习之后所取得的动作数据进行转换而得到的状态数据,基于学习部32所学习的诊断模型来判定制动装置11的异常。判定部33以能够取得状态数据的方式与转换部31连接。判定部33以能够取得诊断模型的方式与学习部32连接。判定部33进行的判定例如在判定部33已启动时,每次取得状态数据时进行。判定部33的启动例如通过信息中心21的操作员的启动操作来进行。判定部33以能够输出判定结果的方式与监视装置13连接。
55.生成部34是生成表示指标数据所示出的劣化相对于时间的变化的劣化模型的部分。劣化模型是预测劣化指标值在将来的变化的模型。劣化模型包含趋势分量、周期性分量以及短期变动分量。趋势分量是表示增加或减少的单调变化的长期性倾向的分量。周期性分量是表示周期性变化的倾向的分量。短期变动分量是表示短期性变动的分量。生成部34以能够取得指标数据的方式与转换部31连接。
56.预测部35是根据生成部34所生成的劣化模型来预测制动装置11的劣化时期的部分。制动装置11的劣化时期是劣化指标值达到预先设定的阈值的时期。预测部35以能够读入劣化模型的方式与生成部34连接。
57.存储部36是存储判定结果数据的部分。判定结果数据是表示判定部33的判定结果的数据。存储部36以能够取得判定结果数据的方式与判定部33连接。存储部36是存储预测结果数据的部分。预测结果数据是表示预测部35进行的预测结果的数据。存储部36以能够取得预测结果数据的方式与预测部35连接。
58.通知部37是通知判定部33对制动装置11的异常判定结果的部分。通知部37以能够取得判定结果数据的方式与判定部33连接。通知部37是通知预测部35对制动装置11的劣化时期的预测结果的部分。通知部37以能够取得预测结果数据的方式与预测部35连接。通知部37根据判定结果数据或预测结果数据生成通知数据。通知数据是表示要通知的内容的数据。
59.显示装置24是显示所取得的数据所表示的内容的装置。显示装置24例如是显示器。显示装置24例如设置在信息中心21。显示装置24以能够取得通知数据的方式与通知部37连接。
60.接着,使用图2对制动装置异常诊断系统1的功能进行说明。
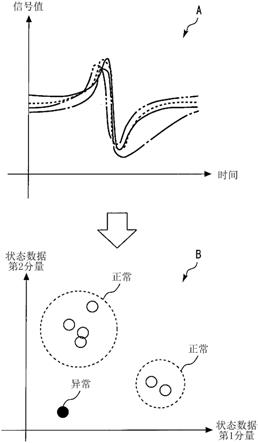
61.图2是示出实施方式1的制动装置异常诊断系统进行的异常诊断的例子的图。
62.在曲线图a中,示出动作数据中包含的数据的例子。曲线图a的横轴表示时间。曲线图a的纵轴表示由动作计测装置计测的信号值。在曲线图a中,各个曲线表示通过制动装置11的一次动作取得的数据。
63.动作数据例如如下这样来取得。
64.控制盘12在轿厢10停靠时,向制动控制装置20输出使制动装置11动作的信号。
65.制动控制装置20依照从控制盘12输入的控制信号使制动装置11动作。在制动装置11动作时,动作计测装置取得动作计测数据。动作计测装置将动作计测数据输出至制动控制装置20或控制盘12。在制动装置11动作时,环境计测装置取得环境计测数据。环境计测装置将环境计测数据输出至制动控制装置20或控制盘12。制动控制装置20将所输入的动作计
测数据以及环境计测数据输出至控制盘12。
66.控制盘12根据动作计测数据以及信号数据等来计算出计算数据。计算数据例如包括根据编码器的脉冲信号的计数而计算出的轿厢10的位置数据。计算数据例如包括从输出制动器吸引指令信号起至制动开关检测出制动装置11的实际动作为止的时间差的数据。计算数据例如包含制动装置11持续进行制动动作的时间的数据。计算数据例如包含制动装置11的动作频度的数据。控制盘12将动作计测数据、信号数据以及计算数据作为动作数据通过监视装置13输出至观测部28。控制盘12通过监视装置13将环境计测数据输出至观测部28。
67.观测部28从控制盘12通过监视装置13取得动作数据以及环境计测数据。观测部28将动作数据以及环境计测数据作为观测数据输出至观测数据存储部25。观测部28将动作数据以及环境计测数据输出至分类部30。
68.观测数据存储部25将所取得的观测数据存储在观测数据库中。观测数据例如包括标志数据、数值数据和波形数据。动作数据的分量例如是标志数据、数值数据或波形数据。
69.标志数据例如包含开关是否进行了动作、传感器是否进行了动作、以及有无控制信号等信息。标志数据利用真假值、整数值或字符串等来表达。
70.数值数据例如包含传感器所计测的物理量的值等信息。数值数据例如包括向线圈17通电的电流、制动装置11进行制动的持续时间、轿厢10的位置、气温、制动装置11的温度、制动装置11的动作频度、气温、以及乘坐于轿厢10的利用者的重量。数值数据利用整数值或实数值等来表达。
71.波形数据例如包含传感器所计测的物理量的时间变化等信息。波形数据例如包含向线圈17通电的电流的模式变化、轿厢10的位置的时间变化以及制动温度的时间变化。波形数据利用包含每隔预定时间间隔的多个数值的列表等来表达。
72.在曲线图a中,示出波形数据的例子。曲线图a所示的多个曲线分别与作为通过制动装置11的一次动作而取得的动作数据分量的波形数据对应。
73.制动装置异常诊断系统1例如通过信息中心21的操作员的操作而开始学习。
74.当制动装置异常诊断系统1开始学习时,数据取得部29生成训练数据集。数据取得部29从观测数据存储部25取得多个观测数据。数据取得部29从属性数据存储部26取得多个属性数据。数据取得部29从异常数据存储部27取得多个判定数据。数据取得部29根据多个观测数据以及多个属性数据生成多个动作数据以及多个环境数据。数据取得部29使多个判定数据与多个动作数据以及多个环境数据建立对应。这时,数据取得部29例如也可以使用制动装置11的动作时刻等来建立对应。或者,也可以是,在对制动装置11的一次动作附加有识别信息的情况下,数据取得部29使用该识别信息来建立对应。数据取得部29根据对应而生成训练数据集。数据取得部29向分类部30输出训练数据集。
75.分类部30根据训练数据集中包含的环境数据,对与该环境数据对应的动作数据进行分类。例如,在环境数据包含分类用标签数据的情况下,分类部30将与标签数据的值彼此相等的环境数据对应的动作数据分类到同一群。或者,分类部30例如将与通过无教师学习法已被分类到同一群的环境数据对应的动作数据分类到同一群。这时,分类部30例如使用作为不分层的分类方法的k平均法作为无教师学习法。或者,分类部30也可以使用分层的分类方法。分类部30将被分类后的动作数据输出至转换部31。
76.转换部31针对分类部30的每个分类,经过特征量提取工序、标准化工序、异常度计算工序以及预备工序的各工序,将动作数据转换为状态数据。
77.在特征量提取工序中,转换部31将被分类后的多个动作数据转换为多个特征数据。转换部31针对动作数据的每个分量提取1个以上的特征量。在动作数据的分量利用真假值来表示时,转换部31从真值或假值中提取例如+1或
‑
1的数值作为特征量。在动作数据的分量利用数值来表示时,转换部31例如将该数值直接作为特征量提取出来。例如,在波形数据等中,动作数据的分量利用数值的列表来表示时,转换部31例如将列表中包含的数值的平均值以及标准偏差等作为1个以上的特征量提取出来。或者,在动作数据的分量利用数值的列表来表示时,转换部31例如将列表中包含的多个数值直接作为多个特征量提取出来。转换部31也可以通过在此未例示的方法从动作数据的分量中提取特征量。转换部31生成多分量的特征数据,该多分量的特征数据包含针对动作数据的每个分量提取出的1个以上的特征量作为分量。
78.在标准化工序中,转换部31将多个特征数据转换为多个标准化数据。标准化数据是多分量的数据。转换部31将特征数据的各分量转换为标准化数据的各分量。标准化数据的分量例如分别被标准化为,使得与包含原来的动作数据的分类有关的平均为0。标准化数据的分量例如分别被标准化为,使得与包含原来的动作数据的分类有关的标准偏差为1。
79.在异常度计算工序中,转换部31将多个标准化数据转换为多个异常度数据。异常度数据是多分量的数据。异常度数据的各分量是表示与通常状态的差异的指标。异常度数据的各分量例如根据特征数据的各分量来计算。转换部31例如针对特征数据的各分量,通过将来自平均值的平方偏差除以方差来计算异常度数据的各分量。转换部31也可以通过其他机器学习等方法将标准化数据转换为异常度数据。
80.在预备工序中,转换部31将多个异常度数据转换为多个状态数据。转换部31将无教师学习法作为预备性处理而应用于异常度数据。无教师学习法例如是基于pca(principal component analysis:主分量分析)的降维法。或者,无教师学习法例如是基于k平均法的聚类法。转换部31将训练数据集中所包含的多个判定数据和从与该多个判定数据对应的多个动作数据进行转换而得到的多个状态数据输出至学习部32。
81.在曲线图b中,示出两个分量的状态数据的例子。曲线图b的横轴表示状态数据的第1分量。曲线图b的纵轴表示状态数据的第2分量。在曲线图b中,各个点表示从通过制动装置11的一次动作取得的动作数据进行转换而得到的状态数据。另外,状态数据也可以是1个分量或3个分量以上的数据。
82.学习部32根据多个状态数据,例如通过将多个判定数据作为教师数据的有教师学习法,针对分类部30的每个分类来学习诊断模型。在此,有教师学习法例如是线性或非线性的分类方法。有教师学习法例如是k附近法、判别分析或svm(support vector machine:支持向量机)。这时,判定数据中包含的异常的有无、异常的种类以及异常的程度例如作为标签被附加给通过线性或非线性的分类方法进行分类的群。在学习了诊断模型之后,学习部32将该诊断模型保存到内置的存储区域中。
83.在曲线图b中,表示正常状态的状态数据由白圆圈来表示。根据学习部32所学习的诊断模型,表示正常状态的状态数据被分类到表示正常状态的两个群中的任意群。
84.判定部33例如通过信息中心21的操作员的操作而启动。判定部33在启动时,读入
学习部32所保存的诊断模型。
85.在判定部33已启动的情况下,分类部30在从观测部28取得观测数据时,从属性数据存储部26取得关于与该观测数据对应的电梯2的属性数据。分类部30从观测数据以及属性数据取得动作数据以及环境数据。分类部30根据环境数据对动作数据进行分类。分类部30将被分类后的动作数据输出至转换部31。转换部31根据分类部30的分类,将动作数据转换为状态数据。这时,转换部31通过与训练数据集中包含的动作数据同样的方法来进行向状态数据的转换。即,转换部31以能够由同一动作数据获得同一状态数据的方式来进行转换。转换部31将转换后的状态数据输出至判定部33。
86.判定部33根据从学习部32读入的诊断模型,使用状态数据来判定制动装置11的异常。判定部33例如取得异常的有无、异常的种类以及异常的程度作为制动装置11的异常判定结果。例如,在学习部32中通过k附近法等分类方法进行了学习的情况下,判定部33根据预处理完毕数据所被分类的群的标签来取得制动装置11的异常的有无、异常的种类以及异常的程度。
87.在曲线图b中,表示异常状态的状态数据由黑圆点来表示。判定部33例如在状态数据未被分类到表示正常状态的2个群中的任何一个群时,判定为该状态数据表示异常状态。表示正常状态的群也可以是1个或3个以上。或者,判定部33也可以在状态数据被分类到表示异常状态的1个以上的群中的任意群时,判定为该状态数据表示异常状态。
88.判定部33将判定结果数据输出至存储部36。判定结果数据包括判定部33作为判定结果而取得的制动装置11的异常的有无、异常的种类以及异常的程度。判定结果数据包含异常度数据。判定结果数据包含到被判定为异常的裕度的数据。到被判定为异常的裕度例如是降维后的空间中的状态数据所对应的点与表示异常的群的重心之间的距离的最小值。
89.存储部36存储判定结果。
90.判定部33根据判定结果来输出针对控制盘12的请求信号。判定部33例如如下所述输出请求信号。
91.判定部33例如根据异常的有无、异常的种类或异常的程度,根据预先设定的基准来判定判定的结果是否表示不可运转状态。不可运转状态是电梯2无法运转的状态。或者,输出部例如在状态数据被分类到表示作为与不可运转状态对应的异常而预先设定的异常的群时,判定为判定的结果表示不可运转状态。不可运转状态例如包括制动装置11不动作的状态、或者当使制动装置11动作时异常的程度会显著恶化的状态。判定部33在判定的结果表示不可运转状态时,向控制盘12输出使电梯2的运转停止的请求信号。控制盘12依照请求信号,使电梯2的运转停止。
92.判定部33例如根据异常的有无、异常的种类或异常的程度,根据预先设定的基准来判定判定的结果是否表示非正常状态。非正常状态是不正常的状态。或者,判定部33例如在状态数据未被分类到表示正常的群时,判定为判定的结果表示非正常状态。或者,判定部33例如在状态数据被分类到任意的表示异常的群时,判定为判定的结果表示非正常状态。
93.判定部33在判定的结果表示非正常状态时,在轿厢10正停靠在与进行该判定时轿厢10曾停靠过的位置相同的位置的状态下,作为动作试验,将使制动装置11进行动作的请求信号输出至控制盘12。控制盘12依照请求信号,不使轿厢10行驶,而是作为动作试验使制动装置11动作。在制动装置11进行动作时,观测部28取得动作数据。分类部30对观测部28所
取得的动作数据进行分类。转换部31将分类部30进行分类后的动作数据转换为状态数据。判定部33根据转换部31转换后的状态数据,基于诊断模型再次判定制动装置11的异常。另外,也可以是,在最初的判定结果表示非正常状态时,在例如通过参照异常历史记录数据库而判定为该非正常状态在动作试验之后转移到了与不可运转状态类似的状态的情况下,判定部33不进行动作试验。
94.判定部33在再次进行了判定的结果表示非正常状态时,在轿厢10正停靠在与进行该判定时轿厢10曾停靠过的位置相同的位置的状态下,作为动作试验,将使制动装置11进行动作的请求信号输出至控制盘12。控制盘12依照请求信号使轿厢10行驶。控制盘12依照请求信号,在轿厢10停靠之后,作为动作试验使制动装置11动作。在制动装置11进行动作时,观测部28取得动作数据。分类部30对观测部28所取得的动作数据进行分类。转换部31将分类部30分类后的动作数据转换为状态数据。判定部33根据转换部31转换后的状态数据,基于诊断模型来判定制动装置11的异常。
95.也可以是,判定部33在最初的判定结果表示非正常状态时,在轿厢10正停靠在与进行该判定时轿厢10曾停靠过的楼层不同的楼层的状态下,将使制动装置11进行动作的请求信号输出至控制盘12。
96.在判定制动装置11的异常时,判定部33将判定结果数据输出至通知部37。
97.在判定部33对制动装置11的异常的判定结果表示可运转状态时,通知部37不通知判定结果数据。可运转状态例如是电梯2能够运转的状态。可运转状态例如包括正常状态或运转不存在障碍的程度的轻微异常状态。
98.在判定部33对制动装置11的异常的判定结果表示不是可运转状态的状态时,通知部37根据判定结果数据生成通知数据。通知数据的内容例如包括异常的种类、异常的程度、与进行判定而得到的状态数据类似的状态数据的数量、以及在取得了该类似的状态数据的电梯2中在取得该类似的状态数据后实施维护点检的时期。通知部37通过向显示装置24输出通知数据而通过显示装置24来通知通知数据的内容。
99.显示装置24显示通知数据的内容。显示部例如显示“发生了种类x的异常。异常程度为50%。在过去的类似的100个事例中,针对50个事例在1个月以内进行了维护点检,针对70个事例在2个月以内进行了维护点检。”等。
100.接着,使用图3和图4对制动装置异常诊断系统1的动作例进行说明。
101.图3和图4是示出实施方式1的制动装置异常诊断系统的动作例的流程图。
102.在图3中,示出与制动装置异常诊断系统1的诊断模型的学习有关的动作。
103.在步骤s11中,分类部30从数据取得部29取得训练数据集。分类部30根据训练数据集中包含的环境数据,对与该环境数据对应的动作数据进行分类。之后,制动装置异常诊断系统1的动作进入步骤s12。
104.在步骤s12中,转换部31针对分类部30的每个分类将动作数据转换为状态数据。之后,制动装置异常诊断系统1的动作进入步骤s13。
105.在步骤s13中,学习部32根据状态数据来学习制动装置11的异常诊断模型。之后,制动装置异常诊断系统1的动作进入步骤s14。
106.在步骤s14中,学习部32将所学习的诊断模型保存到内置的存储区域。之后,制动装置异常诊断系统1的动作结束。
107.在图4中,示出与制动装置异常诊断系统1的异常诊断有关的动作。
108.在步骤s21中,判定部33从学习部32读入诊断模型。之后,制动装置异常诊断系统1的动作进入步骤s22。
109.在步骤s22中,分类部30从观测部28取得观测数据。分类部30从属性数据存储部26取得属性数据。分类部30从观测数据以及属性数据取得动作数据以及环境数据。分类部30根据环境数据对动作数据进行分类。之后,制动装置异常诊断系统1的动作进入步骤s23。
110.在步骤s23中,转换部31针对分类部30的每个分类将动作数据转换为状态数据。之后,制动装置异常诊断系统1的动作进入步骤s24。
111.在步骤s24中,判定部33根据所读入的诊断模型,根据状态数据来判定制动装置11的异常。之后,制动装置异常诊断系统1的动作进入步骤s25。
112.在步骤s25中,判定部33将判定结果输出至通知部37以及存储部36。之后,制动装置异常诊断系统1的动作进入步骤s22。
113.如以上进行了说明的那样,实施方式1的制动装置异常诊断系统1具备观测部28、转换部31、数据取得部29、学习部32和判定部33。观测部28在制动装置11动作时取得与制动装置11的动作有关的动作数据。制动装置11对电梯2的轿厢10进行制动。转换部31将观测部28所取得的动作数据转换为与制动装置11的故障现象对应的状态数据。数据取得部29取得对制动装置11判定异常而得到的判定数据。学习部32使用状态数据以及判定数据,通过有教师学习法来学习制动装置11的异常诊断模型。判定部33根据转换部31对观测部28在学习部32的学习之后所取得的动作数据进行转换而得到的状态数据,基于诊断模型来判定制动装置11的异常。
114.判定部33根据通过有教师学习法所学习的诊断模型来判定制动装置11的异常。在有教师学习法中,事先不需要诊断为异常的阈值。因此,能够根据诊断为异常的阈值为未知的数据来诊断制动装置11的异常。
115.观测部28能够取得各种各样的数据作为动作数据。学习部32通过有教师学习法来进行学习。因此,学习部32能够学习基于复杂判定条件的诊断模型。由此,判定部33能够识别与多个种类的异常对应的状态和正常状态。此外,判定部33能够高精度地检测出利用单一的一次式无法预测的到异常发生的时间那样的突发性的异常。
116.此外,制动装置异常诊断系统1具备分类部30。分类部30根据与制动装置11的动作环境有关的环境数据,对动作数据进行分类。学习部32针对分类部30的每个分类来学习诊断模型。判定部33根据针对分类部30的每个分类所学习的诊断模型来判定制动装置11的异常。
117.学习部32能够使用已被分类到有意义的分类的数据来进行学习处理。因此,即使在由于环境因素而存在多个动作数据的正常区域的情况下,学习部32也能够学习精度较高的诊断模型。此外,减少了学习部32的学习中的计算量。
118.此外,制动装置异常诊断系统1具备通知部37。通知部37通知判定部33对制动装置11的异常判定结果。
119.显示装置24从通知部37取得通知数据。显示装置24显示通知数据的内容。由此,例如,信息中心21的操作员能够迅速获知异常判定结果。
120.此外,制动装置异常诊断系统1具备存储部36。存储部36存储判定部33对制动装置
11的异常判定结果。通知部37在该判定结果表示电梯2能够运转的状态时,不通知该判定结果。
121.通知部37不通知表示紧急性较低的状态的判定结果。由此,紧急性较高的信息不易被忽略。
122.此外,判定部33在制动装置11的异常判定结果表示不正常的状态时,输出使制动装置11在与进行了该判定时的电梯2的轿厢10的位置相同的位置处对轿厢10进行制动的信号。判定部33根据转换部31对制动装置11在该位置处对轿厢10进行制动时观测部28所取得的动作数据进行转换而得到的状态数据,基于诊断模型来判定制动装置11的异常。
123.判定部33判定表示不正常的状态的结果是否在相同的位置处再现。由此,判定部33能够判定先前的判定结果是否是由偶然性因素引起的。例如,也可以是,在表示不正常的状态的结果没有再现的情况下,判定部33判定为先前的判定结果是偶然性因素引起的。偶然性因素例如包括电气性噪声等。
124.此外,判定部33在制动装置11的异常判定结果表示不正常的状态时,输出使制动装置11在与进行了该判定时的电梯2的轿厢10的位置不同的位置处对轿厢10进行制动的信号。判定部33根据转换部31对制动装置11在该位置处对轿厢10进行制动时观测部28所取得的动作数据进行转换而得到的状态数据,基于诊断模型来判定制动装置11的异常。
125.判定部33判定表示不正常的状态的结果是否在不同的位置处再现。由此,判定部33能够判定先前的判定结果是否为例如因制动鼓15或制动靴16的局部性异常引起的。例如,也可以是,在表示不正常的状态的结果没有再现的情况下,判定部33判定为先前的判定结果是因制动鼓15或制动靴16的局部性异常引起的。例如,也可以是,在表示不正常的状态的结果再现的情况下,判定部33判定为先前的判定结果不是因制动鼓15或制动靴16的局部性异常引起的。
126.此外,判定部33在制动装置11的异常判定结果表示无法进行电梯2的运转的状态时,输出使电梯2的运转停止的信号。
127.在电梯2发生无法运转的异常时,电梯2迅速停止。由此,能够确保利用者的安全。此外,能够抑制制动装置11的异常的恶化。
128.此外,也可以是,学习部32使用状态数据以及判定数据,通过无教师学习法来学习制动装置11的异常诊断模型。
129.在此,使用图5对基于通过无教师学习所学习的诊断模型的制动装置异常诊断系统1的异常诊断的例子进行说明。在此,对与通过有教师学习来学习了诊断模型的情况的不同点进行详细说明。
130.图5是示出实施方式1的制动装置异常诊断系统进行的异常诊断的例子的图。
131.在曲线图a中,与图2同样地示出动作数据中包含的数据的例子。
132.在制动装置异常诊断系统1开始学习时,数据取得部29生成训练数据集。这时,数据取得部29所生成的训练数据集也可以不包含判定数据。
133.转换部31将由分类部30分类后的多个动作数据转换为多个状态数据。
134.在曲线图c中,示出转换后的多个状态数据的例子。曲线图c的横轴表示制动装置11的动作次数。在曲线图c中,各个点表示由通过制动装置11的一次动作取得的动作数据进行转换而得到的状态数据。曲线图c的纵轴表示状态数据的值。状态数据也可以是两个分量
以上的数据。在曲线图c中,表示正常状态的状态数据由白圆圈来表示。在曲线图c中,表示异常状态的状态数据由黑圆点来表示。
135.学习部32根据多个状态数据,通过无教师学习法针对分类部30的每个分类来学习诊断模型。在此,无教师学习法例如是线性或非线性的分类方法。无教师学习法例如是离群值检测方法。无教师学习法例如是one
‑
class svm(一类支持向量机)。或者,无教师学习法例如是lof(local outlier factor:局部异常因子)法。或者,无教师学习法例如是k平均法等分类方法。这时,也可以是,例如如果状态数据未被分类到任何群,则学习部32将该群判定为离群值来学习诊断模型。学习部32例如在由新取得的动作数据进行转换而得到的状态数据被判定为离群值的情况下,以使该状态数据表示异常状态的方式来学习诊断模型。学习部32也可以使用从状态数据转换得到的数据来检测离群值。
136.在学习了诊断模型之后,学习部32将该诊断模型保存到内置的存储区域。另外,例如也可以由维护人员事后将表示异常的有无、异常的种类或异常的程度的标签附加于根据诊断模型而分类的群。
137.判定部33根据通过无教师学习法所学习的诊断模型来判定制动装置11的异常。在无教师学习法中,事先不需要诊断为异常的阈值。因此,能够根据诊断为异常的阈值为未知的数据来诊断制动装置11的异常。此外,学习部32不需要判定数据。
138.观测部28能够取得各种各样的数据作为动作数据。学习部32通过有教师学习法来进行学习。因此,学习部32能够学习基于复杂判定条件的诊断模型。由此,判定部33能够识别与多个种类的异常对应的状态和正常状态。此外,判定部33能够高精度地检测出利用单一的一次式无法预测的到异常发生的时间那样的突发性的异常。
139.此外,制动装置异常诊断系统1具备预测部35,该预测部35根据动作数据来预测制动装置11的劣化时期。在制动装置11的异常诊断中,分类部30也可以根据环境数据和预测部35所预测的劣化时期来对动作数据进行分类。
140.在制动装置11中,例如根据进行更换的零件等的使用期间的不同,可能会产生不同种类的异常。例如,在使用期间的初期,可能会产生因制造上的缺陷等引起的异常。例如,在使用期间的中期,可能会产生偶然性因素等引起的异常。例如,在使用期间的末期,可能会产生因零件的消耗等引起的异常。在此,预测部35对劣化时期的预测反映出零件的使用期间。分类部30根据预测部35对劣化时期的预测对动作数据进行分类。因此,学习部32能够对判定与零件的使用期间等对应的异常的诊断模型进行学习。由此,能够提高判定部33的异常判定的精度。
141.转换部31也可以在从动作数据向状态数据的转换中调换各工序的顺序。转换部31也可以在从动作数据向状态数据的转换中省略1个以上的工序。
142.转换部31在异常度计算工序中,也可以根据标准化数据的多个分量来计算1个异常度分量。由此,制动装置异常诊断系统1能够检测在标准化数据的多个分量之间的关系中所产生的异常。
143.此外,在制动装置11的异常诊断中,判定部33也可以利用roc(receiver operating characteristic:受试者操作特性)曲线来决定判定为发生了异常的阈值。例如,在状态数据是多维数据的情况下,判定部33使用roc曲线的auc(area under curve:曲线下面积)为最大的状态数据的分量来判定异常。这时,判定为发生了异常的阈值例如是
youden index(约登指数)为最大的值。
144.也可以是,在利用者乘坐于轿厢10时,控制盘12使动作试验搁置,直到利用者下梯为止。也可以是,在判定部33根据如下的状态数据所进行的判定的结果不表示非正常状态的情况下,控制盘12取消动作试验,该状态数据是转换部31对观测部28在搁置动作试验的期间制动装置11动作时所取得的动作数据进行转换而得到的状态数据。这时,判定部33也可以将表示取消了动作试验的情况的数据添加到判定结果数据中。
145.也可以是,在判定结果是判定为偶然性因素引起时,判定部33在与该判定有关的判定结果数据中追加表示是偶然性因素引起的可能性的数据。或者,也可以是,在判定结果是判定为偶然性因素引起时,判定部33取消该判定结果。这时,判定部33也可以将该判定结果修改为表示正常状态的结果。
146.也可以是,在判定结果是例如判定为由于制动鼓15或制动靴16的局部性异常引起时,判定部33在与该判定有关的判定结果数据中追加表示是局部性异常引起的可能性的数据。
147.通知部37也可以通过向维护人员所持有的维护终端输出通知数据,将通知数据的内容通知给维护人员。通知部37也可以通过向多个输出目的地同时输出通知数据来进行通知。
148.也可以是,在电梯2中设有例如针对利用者的显示装置24的情况下,通知部37通过监视装置13等向显示装置24输出通知数据而将通知数据的内容通知给利用者。例如,在通知数据的内容表示不可利用状态的情况下,显示装置24显示“该电梯不能利用”等。由此,利用者能够接收与可否利用电梯2等有关的判定结果的通知。
149.通过将数据服务器22设置在信息中心21,从而制动装置异常诊断系统1能够利用电梯2及其他电梯的信息。由此,能够提高制动装置异常诊断系统1的异常诊断的精度。
150.通过将分类部30设置在信息中心21,使得动作数据的分类算法的更新等维护变得容易。通过将转换部31设置在信息中心21,使得动作数据的转换算法的更新等维护变得容易。通过将学习部32设置在信息中心21,使得诊断模型的学习算法的更新等维护变得容易。通过将判定部33设置在信息中心21,使得异常判定算法的更新等维护变得容易。
151.维护支援装置23也可以设置在建筑物3。这时,维护支援装置23例如与控制盘12直接进行通信。维护支援装置23例如通过监视装置13与数据服务器22进行通信。数据服务器22也可以设置在建筑物3。
152.制动装置异常诊断系统1的一部分或全部功能也可以在设置于建筑物3的装置中被实现。例如,判定部33也可以在设置于建筑物3的装置中被实现。这时,判定部33能够在不受建筑物3与信息中心21之间可能发生的通信障碍的影响的情况下迅速进行制动装置11的异常判定。
153.实施方式1中的系统、装置、设备、部分等之间的电连接可以是直接连接或间接连接中的任意一种。实施方式1中的系统、装置、设备、部分等之间的数据等的通信可以是直接通信或间接通信中的任意方式。
154.接着,使用图6对制动装置异常诊断系统1的硬件结构的例子进行说明。
155.图6是示出实施方式1的制动装置异常诊断系统的主要部分的硬件结构的图。
156.制动装置异常诊断系统1的各功能能够通过处理电路来实现。处理电路具备至少1
个处理器1b和至少1个存储器1c。处理电路具备处理器1b和存储器1c,并且或者也可以具备至少1个专用的硬件1a作为它们的替代。
157.在处理电路具备处理器1b和存储器1c的情况下,制动装置异常诊断系统1的各功能通过软件、固件、或者软件和固件的组合来实现。软件和固件中的至少一方被记述为程序。该程序存储在存储器1c中。处理器1b通过读出并执行存储在存储器1c中的程序来实现制动装置异常诊断系统1的各功能。
158.处理器1b也称为cpu(central processing unit:中央处理单元)、处理装置、运算装置、微处理器、微计算机、dsp。存储器1c例如由ram、rom、闪存、eprom、eeprom等非易失性或易失性的半导体存储器、磁盘、软盘、光盘、紧凑型光盘、迷你盘、dvd等构成。
159.在处理电路具备专用的硬件1a的情况下,处理电路例如通过单一电路、复合电路、编程处理器、并行编程处理器、asic(application specific integrated circuit:专用集成电路)、fpga(field programmable gate array:现场可编程门阵列)、或它们的组合来实现。
160.制动装置异常诊断系统1的各功能能够分别通过处理电路来实现。或者,制动装置异常诊断系统1的各功能也能够统一通过处理电路来实现。制动装置异常诊断系统1的各功能也可以通过专用的硬件1a实现一部分,通过软件或固件来实现其他部分。这样,处理电路通过硬件1a、软件、固件或它们的组合来实现制动装置异常诊断系统1的各功能。
161.产业上的可利用性
162.本发明的制动装置异常诊断系统能够应用于电梯。
163.标号说明
164.1:制动装置异常诊断系统;2:电梯;3:建筑物;4:井道;5:层站;6:层站门;7:曳引机;8:主绳索;9:对重;10:轿厢;11:制动装置;12:控制盘;13:监视装置;14:轿厢门;15:制动鼓;16:制动靴;17:线圈;18:推杆;19:弹簧;20:制动控制装置;21:信息中心;22:数据服务器;23:维护支援装置;24:显示装置;25:观测数据存储部;26:属性数据存储部;27:异常数据存储部;28:观测部;29:数据取得部;30:分类部;31:转换部;32:学习部;33:判定部;34:生成部;35:预测部;36:存储部;37:通知部;1a:硬件;1b:处理器;1c:存储器。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1