防撞伸缩货叉的制作方法
[0001]
本实用新型涉及一种搬运机械领域,尤其涉及一种防撞伸缩货叉。
背景技术:
[0002]
在现代智能仓储和智能物流飞速发展中,需要对大量的货物进行搬运与堆放,尤其是相对狭小的空间进行立体高架仓库的搬运与堆放,需要采取一种机械装置。该机械装置可以在相对狭小的三维空间上进行运动、并按照一定的顺序进行反复运动,以完成对货物单元的搬运、堆集等动作。该机械装置通常称为堆垛机。堆垛机最主要的功能部分则为货叉装置。通过货叉装置完成货物单元的抓取、输送、放置等动作。
[0003]
现有的货叉本身结构较为复杂,安装过程较为繁琐、货叉安装至堆垛机上可能出现安装不平稳的现象,另外,由于仓储的货物非常多,货叉装置运行空间较为狭窄或者装载货物的货箱出现破损,货物有垮塌的现象,在工作过程中,可能出现碰到垮塌的货物,叉坏货物,造成财产损失。
[0004]
因此,有必要提供一种新的防撞伸缩货叉来解决上述问题。
技术实现要素:
[0005]
本实用新型的目的是提供一种防止叉坏货物的防撞伸缩货叉。
[0006]
为实现上述目的,本实用新型采用如下技术方案:一种防撞伸缩货叉,其包括一对基座、安装于其中一个基座上的驱动单元、分别安装于所述基座且连接所述驱动单元的传动单元及连接所述传动单元且位于所述基座上的伸缩单元,所述基座还具有固定其表面的一对固定板,所述固定板的上表面设置一对感应相机,所述感应相机的镜头分别朝向所述基座的正前方与正后方。
[0007]
自所述基座的下表面的两端向上凹陷形成一对安装缺口,所述固定板分别水平安装于所述安装缺口中。
[0008]
所述感应相机收容于所述安装缺口中。
[0009]
所述固定板上的分别固定一对水平仪。
[0010]
所述水平仪通过螺钉水平的固定于所述固定板的侧边,所述水平仪的指数水平朝上。
[0011]
所述基座为纵长型整体式结构,其包括自其上表面向下凹陷形成的收容腔、自其下表面向上凹陷且贯通所述收容腔的通槽及位于所述收容腔两侧的安装壁,所述收容腔贯穿基座的前后表面。
[0012]
所述安装缺口位于所述收容腔的下方。
[0013]
所述驱动单元包括固定于所述基座下方的驱动电机、连接所述驱动电机的减速机、连接所述减速机的传动杆及套设于所述传动杆的主动齿轮,所述传动单元包括设于所述收容腔内的若干从动齿轮,所述伸缩单元包括位于所述基座上方的第一伸缩叉、位于所述第一伸缩叉上方的第二伸缩叉及分别固定连接于所述第一伸缩叉与所述第二伸缩叉的
传动链条,第一伸缩叉具有与所述从动齿轮相互啮合的齿条。
[0014]
与现有技术相比,本实用新型防撞伸缩货叉的有益效果:通过在基座上设置固定板,并在固定板的上表面设置一对感应相机,所述感应相机的镜头分别朝向所述基座的正前方与正后方的技术,在工作时,实时通过感应相机对行走路径进行拍照,确认路径上是否有障碍。
附图说明
[0015]
为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,其中:
[0016]
图1是本实用新型防撞伸缩货叉闭合状态结构示意图。
[0017]
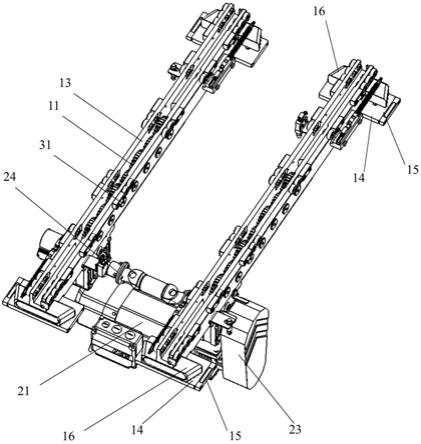
图2是本实用新型防撞伸缩货叉伸出状态示意图。
[0018]
图3是图1所示防撞伸缩货叉闭合状态另一角度结构示意图。
[0019]
图4是图1所示防撞伸缩货叉部分结构示意图。
[0020]
图5是图1所示防撞伸缩货叉的基座结构示意图。
[0021]
图6是图5所示基座另一角度结构示意图。
[0022]
图7是图1所示防撞伸缩货叉的水平仪与感应相机结构安装示意图。
[0023]
图8是图2所示中a处的放大图。
具体实施方式
[0024]
下面结合附图对本实用新型作详细的描述,但是应该强调的是,下面的实施方式只是示例性的,而不是为了限制本实用新型的范围及应用。
[0025]
请参见看图1至图8,本实用新型为一种防撞伸缩货叉,其包括一对基座1、安装于其中一个基座1上的驱动单元2、分别安装于基座1且连接所述驱动单元的传动单元3及连接所述传动单元3且位于所述基座1上的伸缩单元4。
[0026]
基座1为纵长型整体式结构,其包括自其上表面向下凹陷形成收容腔 11、自下表面向上凹陷且贯通收容腔11的通槽12及位于所述收容腔11 两侧的安装壁13,收容腔11贯穿基座1的前后表面,通槽12未贯穿基座 11的前后表面。自基座1的下表面的两端,向上凹陷形成一对安装缺口10,基座1还具有固定其表面的固定板14,固定板14水平设置,固定板14 分别水平安装于安装缺口10,安装缺口10位于收容腔11的下方,两者不相互贯通。固定板14的两侧分别固定一对水平仪15,水平仪15通过螺钉水平的固定于固定板14的侧边,水平仪15的指数水平朝上,具体的,水平仪15中的水银珠(显示水平位置)朝向正上方。固定板14的上表面设置感应相机16,感应相机16收容于安装缺口10中,一对感应相机16的镜头分别朝向基座1的正前方与正后方。感应相机16用于对位于其前后方的物件进行拍照,确认物体与感应相机16的距离。
[0027]
固定板14用于安装于堆垛机(未图示),在安装过程中,通过水平仪 15进行确认固定板14是否在水平面上,若不在水平面,通过调整堆垛机的位置,确保固定板14在水平面上。在堆垛机长期使用过程中,本实用新型的防撞伸缩货叉可能旋转倾斜,那么也可以通过
水平仪15的标识确认固定板14是否在水平方向。由于水平仪15始终固定在固定板14上,可以实时对防撞伸缩货叉进行监控,防止防撞伸缩货叉长期使用出现的歪斜等风险。
[0028]
基座1还包括贯穿安装壁13连通通槽12的固定槽17及位于固定槽 17上方且贯穿安装壁13连通收容腔11的固定孔18。固定槽17用于固定轴承,固定孔18用于收容滚轮轴(未图示),滚轮轴上安装有滚轮19,滚轮19分别位于安装壁13的外侧。
[0029]
驱动单元2包括固定于基座1下方的驱动电机21、连接驱动电机21 的减速机23、连接减速机23的传动杆24及套设于传动杆24的主动齿轮(未图示)。
[0030]
传动单元3包括设于收容腔11内的若干从动齿轮31,从动齿轮31相互咬合排列成一排,其中一个从动齿轮31与主动齿轮相咬合,以确保电机输出的动力通过主动齿轮带动从动齿轮31旋转。从动齿轮31安装于转动轴(未图示),转动轴通过轴承(未图示)安装于安装壁13上的固定槽 17内。
[0031]
伸缩单元4包括位于基座1上方的第一伸缩叉41、位于第一伸缩叉41 上方的第二伸缩叉42及分别固定连接于第一伸缩叉41与第二伸缩叉42 的传动链条43。
[0032]
第一伸缩叉41为纵长结构,其包括位于基座1上方的第一水平部411、自第一水平部411两侧垂直延伸的第一竖直部412。第一水平部411下表面具有与从动齿轮31相互啮合的齿条(未图示),通过转动从动齿轮31,从而带动第一伸缩叉41沿基座1延伸方向运动,第一竖直部412具有自其下表面向上凹陷形成的第一导向槽413及自其侧表面向内凹陷形成的第二导向槽414,第一导向槽413分别与滚轮19相对应,滚轮19抵持第一导向槽413,当第一伸缩叉41运动时,滚轮19对第一伸缩叉41进行导向。
[0033]
第二伸缩叉42包括位于第一水平部411上方的第二水平部421及自第二水平部421两侧垂直延伸的第二竖直部422,第二竖直部422位于第一水平部412的外侧,第二竖直部422的内部安装有导向轮(未图示),导向轮收容于第二导向槽414中,第二伸缩叉42通过导向轮支撑于第一伸缩叉41上,并沿第二导向槽414延伸方向运动。
[0034]
第二伸缩叉42的运动通过传动链条43提供动力,传动链条43连接第一伸缩叉41与第二伸缩叉42的方式为一种现有技术,在此不详细叙述。可参考中国专利申请号第cn201710637375.2号专利描述内容。
[0035]
当货叉工作时,第一伸缩叉41与第二伸缩叉42到达取货前方,感应相机16确认第一伸缩叉41与第二伸缩叉42前方运行的路径中是否有阻挡物,若反向前方路径中有阻挡物,通过对阻挡物、货物的边缘尺寸进行技术,获得第一伸缩叉41与第二伸缩叉42避开阻挡物、货物的安全运行路径,那么通过控制堆垛机进行偏转的方式进行叉取货物。
[0036]
感应相机16为一种现有技术工业相机(cmos图像传感,解析度1920*1080@30fps)。
[0037]
因此,通过在固定板14增加感应相机16,对第一伸缩叉41与第二伸缩叉42的路径进行感应,确保本实用新型防撞伸缩货叉在工作时不会出现误叉,叉坏货物的现象。
[0038]
基座1为整体式结构,通过在基座1上设置收容腔11、通槽12、固定槽17,确保安装壁13上的一对固定槽17的位置偏差出现最小,提高第一伸缩叉41与第二伸缩叉42的运行顺滑程度。
[0039]
当然,本技术领域内的一般技术人员应当认识到,上述实施例仅是用来说明本实用新型,而并非用作对本实用新型的限定,只要在本实用新型的实质精神范围内,对上述实施例的变化、变型都将落在本实用新型权利要求的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1