自适应夹紧装置的制作方法
自适应夹紧装置
【技术领域】
[0001]
本申请涉及自动化领域,尤其涉及自适应夹紧装置。
背景技术:
[0002]
底托是一种打包设备的耗材,打包过程中需对其进行搬动。传统的夹持装置需先根据底托的尺寸规格设置好参数后再进行夹持,自适应对位能力差,需要底托堆叠整齐且摆放居中,当底托堆叠不整齐或摆放不居中时夹持装置将会钩不到底托或推歪上层底托造成底托倾覆。
技术实现要素:
[0003]
本发明针对现有夹持装置自适应对位能力差的问题作出改进,提供自适应夹紧装置,包括支架,所述支架上设有可沿其在第一方向上移动的夹持机构,所述夹持机构包括设置在所述支架上可沿所述支架在第一方向上移动的第一支撑架,所述第一支撑架上设有两夹具,两所述夹具可在第一方向上相对所述第一支撑架移动靠近或远离以夹持或释放物料,所述夹具上设有用于限制其与物料在第一方向上的间距的第一限距机构。
[0004]
作为上述自适应夹紧装置的一种改进,所述夹具包括设置所述第一支撑架的相对位置上的基板,所述基板上设有朝另一所述夹具延伸凸出所述基板的插板。
[0005]
作为上述自适应夹紧装置的一种改进,所述第一限距机构包括设置在所述夹具上朝另一所述夹具延伸的第三支撑板,所述第三支撑板靠近另一所述夹具的一侧设有第一感应器。
[0006]
作为上述自适应夹紧装置的一种改进,所述第一支撑架与所述夹具上设有使所述夹具沿所述第一支撑架移动的滑动机构。
[0007]
作为上述自适应夹紧装置的一种改进,所述滑动机构包括设置在所述第一支撑架上沿第一方向延伸的滑轨以及设置在所述夹具上与所述滑轨滑动配合的滑座。
[0008]
作为上述自适应夹紧装置的一种改进,所述滑座在垂直于其移动方向的方向上延伸,所述夹具包括多个在所述滑座的延伸方向上间隔设置的子夹具。
[0009]
作为上述自适应夹紧装置的一种改进,所述第一支撑架上设有驱动所述夹具沿其在第一方向上滑动的动力机构。
[0010]
作为上述自适应夹紧装置的一种改进,所述动力机构包括在所述第一支撑架上相对设置的主动轮和从动轮,所述主动轮和所述从动轮上张紧有皮带,所述皮带与所述夹具上设有第一连接件,所述主动轮上设有电机。
[0011]
作为上述自适应夹紧装置的一种改进,所述夹持机构可沿所述支架在第二方向上移动靠近或远离物料,所述夹持机构上设有用于限制其与物料在第二方向上的间距的第二限距机构。
[0012]
作为上述自适应夹紧装置的一种改进,所述第一支撑架上设有第二支撑架,所述第二支撑架上设有第二连接件,所述第二连接件远离所述第二支撑架的一端设有第二感应
器。
[0013]
与现有技术相比,本发明具有如下优点:
[0014]
本发明提供了自适应夹紧装置,利用夹具与第一支撑架可在同一方向移动,配合检测夹具与底托距离的第一限距机构,实现一夹具移动到位后使其相对底托静止,另一夹具相对底托加速靠近,最终实现底托的夹持,综上可以,本发明可自动适配底托的宽度,底托无需整齐且摆放居中,简化了产出流程同时提高了生产效率。
【附图说明】
[0015]
为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍。
[0016]
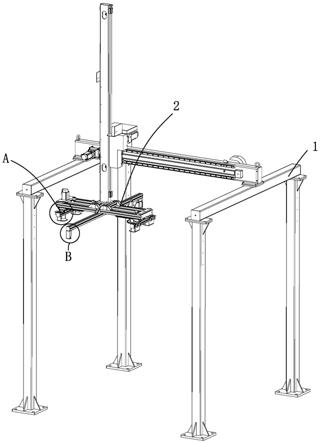
图1为本申请自适应夹紧装置的立体图;
[0017]
图2为本申请自适应夹紧装置中夹持机构的立体图;
[0018]
图3为图1中a处的局部放大图;
[0019]
图4为图1中b处的局部放大图;
[0020]
图5为本申请自适应夹紧装置中夹具的立体图;
[0021]
图6为本申请自适应夹紧装置中夹持机构的俯视图。
【具体实施方式】
[0022]
为了使本申请所解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本申请,并不用于限定本申请。
[0023]
如图1-6所示的自适应夹紧装置,包括支架1,所述支架1上设有可沿其在第一方向上移动的夹持机构2,所述夹持机构2包括设置在所述支架1上的第一支撑架21,所述第一支撑架21可沿所述支架1在第一方向和第二方向上移动,具体地,第一方向为左右方向,第二方向为竖直方向,所述第一支撑架21上设有两夹具22,两所述夹具22可在第一方向上相对所述第一支撑架21移动靠近或远离以夹持或释放物料,所述夹具22上设有用于限制其与物料在第一方向上的间距的第一限距机构3,所述第一支撑架21上设有第二支撑架8,所述第二支撑架8上设有第二连接件9,具体地,所述第一支撑架21与所述第二支撑架8在水平面上垂直设置,所述第二连接件9远离所述第二支撑架8的一端设有第二限距机构7,所述第二限距机构7用于限制所述夹持机构2与物料在第二方向上的间距。本发明的操作步骤如下:所述第一支撑架21在竖直方向上移动靠近底托,当所述第二限距机构7检测到所述夹持机构2接近底托时,发出指令使所述夹持机构2停止下移,此时,两所述夹具22在左右方向上移动靠近,当所述第一限距机构3检测到一所述夹具22接近底托时,所述第一支撑架21在左右方向上移动,所述第一支撑架21的移动方向与接近底托的所述夹具22的移动方向相反,此时,接近底托的所述夹具22与底托相对静止,另一所述夹具22快速移动靠近底托,当另一所述夹具22接近底托时停止,此时两所述夹具22可实现对底托的夹持。综上可以,本发明可自动适配底托的宽度,底托无需整齐且摆放居中,简化了产出流程同时提高了生产效率。
[0024]
具体地,所述第一支撑架21与所述夹具22上设有使所述夹具22沿所述第一支撑架21移动的滑动机构5,所述滑动机构5包括设置在所述第一支撑架21上沿第一方向延伸的滑
轨51以及设置在所述夹具22上与所述滑轨51滑动配合的滑座52。此结构实现了所述夹具22沿第一支撑架21移动,且结构简单,实施方便。
[0025]
进一步地,所述滑座52在垂直于其移动方向的方向上延伸,所述夹具22包括多个在所述滑座52的延伸方向上间隔设置的子夹具200。多个所述子夹具200的设置可提高所述夹具22的夹持能力,防止底托脱落。
[0026]
具体地,所述子夹具200包括两在所述滑座52上相对设置的基板221,所述基板221上设有朝另一所述夹具22延伸凸出所述基板221的插板222。底托常为框架结构,所述子夹具200采用此结构有利于对底托的夹持固定,且此结构简单,实施方便。
[0027]
具体地,所述第一限距机构3包括设置在所述基板221上朝另一所述夹具22延伸的第三支撑板31,所述第三支撑板31靠近另一所述夹具22的一侧设有第一感应器32。所述第一感应器32为现有的感应开关。具体地,所述第三支撑板31突出于所述插板222,此结构可防止所述夹具22过度接近底托,造成底托的倾倒。
[0028]
具体地,所述第一支撑架21上设有驱动所述夹具22沿其在第一方向上滑动的动力机构6。所述动力机构6包括在所述第一支撑架21上相对设置的主动轮61和从动轮62,所述主动轮61和所述从动轮62上张紧有皮带63,所述皮带63与所述滑座52之间连接有第一连接件64,所述主动轮61上设有电机65。此结构实现了所述夹具22沿所述第一支撑架21滑动,且结构简单,实施方便。
[0029]
具体地,所述第一支撑架21上设有第二支撑架8,所述第二支撑架8上设有第二连接件9,所述第二限距机构7包括设置在所述第二连接件9远离所述第二支撑架8一端的第二感应器71。所述第二感应器71为现有的感应开关。
[0030]
应当理解的是,本申请中采用术语“第一”、“第二”等来描述各种信息,但这些信息不应限于这些术语,这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本申请范围的情况下,“第一”信息也可以被称为“第二”信息,类似的,“第二”信息也可以被称为“第一”信息。此外,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
[0031]
如上所述是结合具体内容提供的一种或多种实施方式,并不认定本申请的具体实施只局限于这些说明。凡与本申请的方法、结构等近似、雷同,或是对于本申请构思前提下做出若干技术推演,或替换都应当视为本申请的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1