一种从保温箱中精准取放异形抛涂胶桶装置的制作方法
1.本发明涉及自动精准抓取系统,具体的说是一种从保温箱中精准取放异形抛涂胶桶装置。
背景技术:
2.目前,国内抛涂胶桶的保温箱多为半自动化,需人工辅助参与,尤其是开箱和抓取两个工步完全采用人工操作。该种抓取方式有以下弊端:第一,产品抓取时弹体出箱过程采用人工操作,增加操作人员的劳动强度且效率较低;第二,采用人工抓取容易对异形薄壁胶桶造成变形,影响抛涂料浆供胶过程的精确控制。
3.国内在准确抓取异形抛涂胶桶领域还没有精准识别抓取的装备,现阶段的操作方式不能满足精准识别以及抓取抛涂自动化和高效性的要求。
技术实现要素:
4.本发明的技术解决问题:针对上述问题,本发明目的实现自动运输精准抓取,保证异形抓取的高效性和准确性。
5.本发明的技术解决方案:
6.一种从保温箱中精准取放异形抛涂胶桶装置,包括:线体支撑输送单元、托盘运输装置、胶桶保湿单元、夹手单元、开合机构单元、旋转单元及翻转单元,
7.线体支撑输送单元置于整个装置的底部用于支撑及传送;
8.胶桶保湿单元置于线体支撑输送单元,其内装有藏料,可保持仓料湿度;
9.旋转单元和翻转单元,旋转单元通过旋转杆与翻转单元连接,置于所述胶桶保湿单元一端,通过视觉相机装置实现工件精准定位,通过爪手装置实现抓取,通过旋转座实现旋转移动,通过翻转单元实现翻转换位;
10.开合机构单元能够自动伸出吸盘,吸取指定工件并自动拉回,实现自动伸缩吸取;
11.夹手单元可实现精确识别异形料仓的位置,并实现自动抓取。
12.进一步的,线体支撑输送单元包括下线体驱动装置和托盘定位装置,所述胶桶保湿单元置于所述托盘定位装置之上,夹手单元位于胶桶保湿单元上端;下线体驱动装置安置于所述线体支撑输送单元的下端提供原动力,所述托盘定位装置用于固定和输送所述胶桶保湿单元。
13.进一步的,胶桶保湿单元包括胶桶活动箱体和异形料仓固定装置,异形料仓固定装置置于胶桶活动箱体上,其中所述胶桶保湿单元被放在所述托盘输送装置上,经过线体支撑输送单元运输至预定托盘限位装置位置。
14.进一步的,开合机构单元包括吸盘装置和顶升装置,所述吸盘装置与所述顶升装置连接,在胶桶保湿单元达到预定位置后,顶升装置伸出。
15.进一步的,所述夹手单元包括爪手装置、视觉相机装置及固定装置,所述固定装置与所述旋转单元垂直连接并置于所述旋转单元下端;
16.视觉相机装置位于所述固定装置下端并与之连接并对称分布两侧;爪手装置与固定装置通过滑动副连接对称分布于旋转单元两侧。
17.进一步的,旋转单元包括旋转缸、力传感器和旋转座,所述旋转座与所述力传感器并位于旋转缸下端;所述力传感器与所述旋转缸通过转动副垂直连接并置于翻转单元下端。
18.进一步的,翻转单元包括翻转支座、联轴器和伺服电机,翻转单元置于所述旋转单元上端,所述翻转支座的下端端与所述旋转单元连接,翻转支座侧端与所述联轴器通过旋转副同轴连接,伺服电机与联轴器通过旋转副同轴连接。
19.进一步的,托盘定位装置包括托盘限位装置和定位装置,定位装置置于托盘限位装置上,实现对胶桶保湿单元的定位。
20.进一步的,吸盘装置上的多个吸盘与胶桶活动箱体接触吸合,用于将胶桶活动箱体拉出。
21.进一步的,所述开合机构单元与所述夹手单元位于胶桶活动箱体(的)同一侧。
22.本发明的优点与积极效果为:
23.(1)本发明的夹手单元可实现精确识别异形料仓的位置,并实现自动准确识别抓取功能;
24.(2)本发明的开合机构单元能够自动伸出吸盘,吸取指定工件并自动拉回,实现自动伸缩吸取功能;
25.(3)本发明的能够实现空间坐标中三个维度的自由移动;
26.(4)本发明的胶桶保湿单元能运输仓料,以及保持单元仓内恒定湿度,实现运输安全储存功能。
附图说明
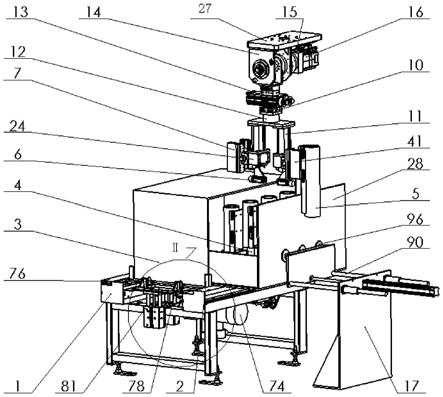
27.图1为本发明的轴测图;
28.图2为本发明的主视图;
29.图3为图2的ⅰ处放大图;
30.图4为图1中ⅱ处放大图。
具体实施方式
31.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
32.如图1所示,一种从保温箱中精准取放异形抛涂胶桶装置。包括:线体支撑输送单元1、托盘运输装置2、胶桶保湿单元3、夹手单元7、开合机构单元17、旋转座11及翻转单元14。其中,所述线体支撑输送单元1置于底部以支撑传送作用;所述胶桶保湿的单元3置于其上端以保持箱内湿度并运载工件;所述旋转座11和所述翻转单元14置于所述胶桶保湿单元3一端,实现精准定位工件、抓取、旋转移动及翻转换位的功能。
33.如图4所示,所述线体支撑输送单元1包括下线体驱动装置74和托盘定位装置76,胶桶保湿单元3置于托盘定位装置81之上,夹手单元位于胶桶保湿单元3上端。其中下线体驱动装置74安置于所述线体支撑输送单元1的下端提供源动力,所述托盘定位装置81包括
托盘限位装置78和定位装置76组成用于固定,并沿x轴方向输送所述胶桶保湿单元3。
34.所述胶桶保湿单元3包括胶桶活动箱体28、异形料仓固定装置4。其中胶桶保湿单元3被放在托盘输送装置81上,经过线体支撑输送单元1的滚动加滑动运输至预定托盘限位装置78位置。等待开合机构将活动箱体28拉出。
35.如图2所示,所述开合机构单元17包括吸盘装置96、顶升装置90。开合机构单元17与夹手单元7在同一侧。所述吸盘装置96与所述顶升装置90连接。在胶桶保湿单元3达到预定位置后,顶升装置90伸出,所述吸盘装置96上的多个吸盘与所述胶桶活动箱体28接触吸合,将其沿y轴方向拉出。
36.如图3所示,所述夹手单元7包括爪手装置41、视觉相机装置6及固定装置24。所述视觉相机装置6位于所述固定装置24下端并与之连接并分布对称两侧;所述爪手装置41与所述固定装置通过滑动副连接分布于旋转单元10对称两侧。待开合机构单元7将活动箱体拉出,夹手单元7沿z轴方向移动,所述视觉相机装置6识别仓料后,爪手装置41抓取仓料并沿z轴反方向回置原位。
37.所述旋转单元10包括旋转缸13、力传感器12、旋转座11。所述旋转座11与所述力传感器12并位于下端;所述力传感器12与所述旋转缸13通过转动副垂直连接并置于其下端。所述旋转单元10可旋转与之相连的夹手单元10,完成回放仓料和换取仓料工作。
38.如图1所示,所述开合机构单元17包括翻转单元14、联轴器15、伺服电16机。开合机构单元17置于所述旋转单元10上端。所述翻转单元14并与所述联轴器15通过旋转副同轴连接。所述开合机构单元17提供夹手单元沿z轴运动的动力。
39.本发明的工作原理为:
40.定义:线体支撑输送单元1所在的水平传送方向为x轴,开合机构单元17的工作方向为y轴,夹手单元7竖直运动方向为z轴,将三轴的交点作为原点。
41.一种从保温箱中精准取放异形抛涂胶桶装置,包括:线体支撑输送单元、托盘运输装置、胶桶保湿单元、夹手单元、开合机构单元、旋转单元及翻转单元。其中,所述线体支撑输送单元置于底部以支撑传送作用;所述胶桶保湿的单元置于其上端以保持箱内湿度并运载工件;所述旋转单元和所述翻转单元置于所述胶桶保湿单元一端,实现精准定位工件、抓取、旋转移动及翻转换位的功能。
42.线体支撑输送单元将托盘运输装置上的胶桶保湿单元沿x轴方向运输至预设位置,开合机构单元的顶升装置沿y轴伸出,与之相连的吸盘装置将活动箱体拉出,呈现出装有仓料的异形固定架。
43.夹手单元沿z轴向下运行至仓料位置,视觉相机自动识别仓料特征,爪手装置通过滑动副将仓料抓取后沿z轴反方向提升回原位。
44.旋转单元在翻转单元的带动下,周向旋转180度,将空夹手装置与以取得的带有仓料的加夹手装置互换位置,此时将两侧的夹手装置同时沿z轴下滑,带有仓料的夹手装置将仓料放下进行下一步工序,而空夹手装置重复上述自动识别和抓取操作。待抓取完成后,沿z轴反方向回升至原位。
45.本发明的夹手单元可实现精确识别异形料仓的位置,并实现自动准确识别抓取功能;本发明的开合机构单元能够自动伸出吸盘,吸取指定工件并自动拉回,实现自动伸缩吸取功能。
46.本发明的能够实现空间坐标中三个维度的自由移动;胶桶保湿单元能运输仓料,以及保持单元仓内恒定湿度,实现运输安全储存功能。
47.以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1