用于多轿厢智能并行电梯轿厢驱动的监测方法与流程
1.本发明涉及电梯运行的监测技术领域,具体涉及一种用于多轿厢智能并行电梯轿厢驱动的监测方法。
背景技术:
2.目前,电梯轿厢广泛采用钢丝绳曳引驱动的方式运行,电梯在一个井道内仅能设置一个轿厢,单轿厢运行模式的电梯在低层建筑、人流量低的场合尚能满足使用需求,但在高人口密度的高层建筑或超高层建筑中其候梯时间长、运送效率低的缺点被显著放大。若是增加电梯井道及对应轿厢又会大幅的占用建筑空间,其成本也会显著提高,并且电梯运送效率低的问题仍然存在。
3.随着工程技术水平的不断发展,逐渐出现了双层轿厢电梯、双轿厢电梯、环型或分叉环型电梯等多轿厢运行的模式,但已知的这些多轿厢电梯运行模式其轿厢均位于同一个井道内的轨道上,各井道之间的电梯轿厢无法进行轨道切换运行,轿厢之间更无法进行超越运行,在运输量剧增的情况下,采用目前的多轿厢运行模式,不仅大幅降低了建筑物的空间利用率,而且没有根本性的解决电梯运送效率低的问题。
4.本技术人研究的多轿厢智能并行电梯为自驱电梯,驱动装置需要外部施力机构使驱动轮与导轨压紧,产生摩擦驱动力,驱动轮压紧力大小,导轨表面情况,轮胎的磨损、所处的井道环境等因素均会对摩擦驱动力影响。如果摩擦驱动力不足,就会出现驱动轮打滑现象,甚至出现无法驱动电梯甚至出现溜车的现象,影响电梯运行的可靠性和安全性。
技术实现要素:
5.本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种用于多轿厢智能并行电梯轿厢驱动的监测方法,确保轿厢驱动正常,无溜车现象,确保电梯运行的可靠性和安全性。
6.为解决上述技术问题,本发明提出的技术方案为:
7.一种用于多轿厢智能并行电梯轿厢驱动的监测方法,电梯系统包括多个轿厢、至少两个主轨道和切换轨道,所述切换轨道设有多个,所述切换轨道用于衔接两个不同的主轨道,所述轿厢设有驱动轮,所述轿厢通过驱动轮在主轨道和切换轨道上进行上行、下行或切轨运行,所述轿厢驱动监测方法是通过对比轿厢的理论位移和绝对位移进行判断。
8.作为上述技术方案的进一步改进:
9.上述方法中,优选地,所述轿厢驱动监测方法包括以下步骤:
10.1)实时获取驱动轮的转速和轿厢的绝对位移;
11.2)通过驱动轮的转速计算轿厢的理论位移;
12.3)将理论位移和绝对位移进行对比,计算输出偏差率及变化趋势;
13.4)根据输出偏差率及变化趋势判断驱动轮是否出现打滑。
14.上述方法中,优选地,所述步骤1)中,沿轿厢运行方向选取监测位置进行监测和获
取驱动轮的转速和轿厢的绝对位移。
15.上述方法中,优选地,所述监测位置至少包括位于主轨道的检测点和轨道变化位置。
16.上述方法中,优选地,所述轨道变化位置包括两个轨道段的连接处。
17.上述方法中,优选地,所述主轨道的检测点包括主轨道上连续的等距点和平层位置。
18.上述方法中,优选地,所述平层位置为轿厢在平层的停靠处。
19.上述方法中,优选地,所述步骤1)中,轿厢的绝对位移设为s2,s2为轿厢移动的实际距离。
20.上述方法中,优选地,所述步骤2)中,理论位移设为s1,
21.s1=π
×d×
n1
22.其中,d为驱动轮直径;
23.n1为驱动轮的转速。
24.上述方法中,优选地,所述步骤4)中,设有至少安全区,所述偏差率及变化趋势位于安全区时,轿厢正常运行;所述偏差率及变化趋势超出安全区时,所述轿厢停止运行。
25.上述方法中,优选地,所述驱动轮设有转速传感器,所述转速传感器用于检测轿厢的理论位移。
26.上述方法中,优选地,所述电梯系统设有位置检测装置,所述位置检测装置用于检测轿厢的绝对位移,所述位置检测装置检测轿厢的实际移动距离。
27.本发明提供的用于多轿厢智能并行电梯轿厢驱动的监测方法,与现有技术相比有以下优点:
28.(1)本发明的用于多轿厢智能并行电梯轿厢驱动的监测方法,设置绝对位置监测和相对位置监测,通过对比两者的位置信息差异,判断是否出现滑动现象,确定轿厢摩擦力是否满足要求。
29.(2)本发明的用于多轿厢智能并行电梯轿厢驱动的监测方法,检测位置包括主轨道上连续的等距点、轨道变化位置及平层位置,包含了主轨道和切换轨道上可能出现状况的点,保证了轿厢运行过程中驱动轮的安全运行。
30.(3)本发明的用于多轿厢智能并行电梯轿厢驱动的监测方法,对比轿厢的理论位移和绝对位移进行判断,判断是否出现异常,如果有异常就需要报警并维护,使轿厢驱动正常,无溜车现象,确保电梯运行的可靠性和安全性。
附图说明
31.图1是本发明的流程示意图。
具体实施方式
32.以下对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
33.图1示出了本发明用于多轿厢智能并行电梯轿厢驱动的监测方法的一种实施方式,电梯系统包括多个轿厢、至少两个主轨道和切换轨道,多条主轨道,形成并行轨道,每个
井道内布设1个主轨道。切换轨道设有多个,切换轨道设于两个主轨道之间,用于衔接两个主轨道,在同一主轨道上可以运行多个轿厢,轿厢在上行或下行过程中通过切换轨道切换主轨道继续上行或下行。电梯系统的结构在本技术人已申请专利中已有记载。
34.本实施例中,切换轨道包括两个弧形轨道和斜轨道,弧形轨道用于衔接主轨道,斜轨道用于衔接两个弧形轨道。轿厢设有驱动装置,驱动装置包括驱动轮和施力机构,驱动轮滚动于主轨道或切换轨道上,带动轿厢进行上行、下行或切轨运动。由于轿厢无曳引结构,所以施力机构将驱动轮压紧于主轨道或切换轨道上,产生摩擦驱动力,其中施力机构施加的载荷直接决定摩擦驱动力的大小。
35.本实施例中,驱动轮上设有转速传感器,用于获取驱动轮的转动距离,得到轿厢的理论位移。电梯系统设有位置检测装置,用于获取轿厢的绝对位移,位置检测装置可以是在主轨道和切换轨道上安装磁栅尺或光栅尺等距离位置检测设备。
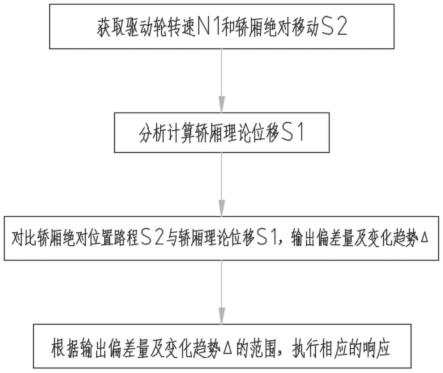
36.本发明的驱动轮打滑监测方法包括以下步骤:
37.(1)动态实时获取驱动轮的转速n1和轿厢的绝对位移s2,沿轿厢的运行方向选取代表性位置进行监测和获取数据,该代表性位置可以是在主轨道上连续的等距点、平层位置和轨道变化位置。平层位置为平层载荷变化的位置,即轿厢的停靠位置,此时轿厢载重是实时会产生变化,需要特别监测;另外就是轨道变化位置,由于弧形轨道和斜轨道会导致驱动轮的受力发生变化。
38.(2)计算轿厢的理论位移s1,s1=π
×d×
n1,其中d为驱动轮直径。
39.(3)将理论位移s1和绝对位移s2进行对比,计算输出偏差率及变化趋势δ,该对比可以是不同运行时段同一代表性位置的对比,也可以是不同时段不同代表位置之间的对比,不同时段可以包含不同的运行情况,比如上行与上行,上行与下行等,还可以结合不同载重时的变化进行综合考虑。
40.(4)根据输出偏差率及变化趋势δ判断驱动轮是否出现打滑,并判断打滑的程度和频次。
41.偏差率及变化趋势δ根据需要设有多级打滑程度判定区δ1、δ2...δn,不同级别的打滑程度所执行的操作指令不一样:
42.1)设δ1=s1,δ未超出δ1,无打滑现象,无需提示预警,轿厢正常运行;
43.2)设δ2=98%s1,δ超出δ1且未达到δ2,进行提示预警,轿厢可正常运行,但是存在安全隐患;
44.3)设δ3=95%s1,δ超出δ2且未达到δ3时进行提示预警,判断轿厢出现异常,获取离此轿厢运行方向最近的平层,轿厢停靠就近平层,打开层门放出乘客,并停止运行,等待维护检查;
45.4)δ超出δ3进行报警并立即停运,轿厢立刻停止,等待应急救援和维护检查。
46.本发明中涉及到的其他结构在本技术人已申请专利中有记载,结合本领域技术人员的常规技术手段,完全可以理解。在此不过过多的重复描述。
47.上述实施案例只是本发明的较佳实施例,并非对本发明作任何形式上的限制。虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1