一种自动装车机的制作方法
[0001]
本实用新型涉及装车机技术领域,尤其涉及一种自动装车机。
背景技术:
[0002]
自动装车机是一种新型的、专业的装卸车设备,可配备液压升降、移动脚轮等进行操作,是一种操作起来非常人性化的自动化物流运输设备,自动装车机主要应用于邮政、快递、机场、码头、医药、化工、烟草等行业。
[0003]
专利cn201310652357.3的公布了一种装车机,该装车机针对现有的装车机,通过由大型机架构成,由于在大型厂房进行装车,对于不同的装车位置,需要通过行车对机架进行移动,不仅需要设置行车以及行车导轨,而且操作较不方便,且增加了生产成本,通过卷扬机带动机架沿着高台移动,继而可以将机架移动至相应的装车位置,使用较方便。
[0004]
上述装车机有些不足之处:劳动强度大,装车人员多,效率低,尽管部分企业已配备输送机、打包机器人、半自动装车机等先进设备,但仍旧未能良好解决袋装散料从仓库到运输车辆这中间的自动化搬运装车的问题,上述设备仍需要借助人工辅助搬运,作业人员工作环境和劳动强度未得到改善。
技术实现要素:
[0005]
本实用新型提供一种自动装车机,旨在采用转动结构,当需要装载时,机械手完成整垛货物码垛后,给出码垛完成信号,控制系统发出指令将整垛货物运送至待装车工位,同时机器人继续码垛,机器人将货物放置在码垛工位上,通过输送带传动至待装车工位,货物进入待装车工位后,自动装车机运行至待装车工位,控制系统对装载机构进行位置校准,准备装载货物时,叉齿叉起整垛货物后做预定仰角运动,在得到叉垛完成信号后,至待装车工位上时通过龙门架上的装载机构将整垛货物夹住,夹包装置加紧货物两侧,装载机构位置校准后,装载机构下探至预定位置,装载机构向前移动向控制系统发出完成装载信号,装载机构提升将货物提起并开始向运输车辆方向移动,通过升降机构抬高,在自动装车机龙门架的最前部,分别于上方、左右两侧安装激光距离传感器。在货物尚未接触到车辆前,通过龙门架架左右两侧的激光传感器测量与运输车辆侧面挡板的距离,经过计算后控制垛叉左右移动位置,达到对正运输车辆中心目的。用于获得运输车辆侧护板高度,控制垛叉提升到运输车辆高度以上。为保证精确对位,行走机构除采用伺服电机控制外,同时配备拉绳位移传感器再通过旋转机构转动移动至运输车辆上方,再通过升降机构下降将整垛货物放进运输车辆内部,当位于龙门架顶部的测距传感器检测到高度值发生突变时,记录突变的位置,作为运输车辆前端的定位,当货物移动到该定位时,降低货物高度,送开夹包装置将货物放置在车辆上,在进行推包将货物推进车内部,返回进行二次装载,省去人工操作的过程,提高了装载的效率,增加了装车机的实用性。
[0006]
本实用新型提供的具体技术方案如下:
[0007]
本实用新型提供的一种自动装车机包括龙门架,所述龙门架上端转动安装有旋转
机构,所述旋转机构中心内部活动安装有升降机构,所述升降机构右侧下端外壁安装有装载机构,所述龙门架左侧地面活动安装有输送带,所述输送带左侧上端有码垛工位,所述输送带右侧上端有待装车工位,所述待装车工位上端活动有整垛货物,所述龙门架右侧活动有运输车辆。
[0008]
可选的,所述装载机构由叉包装置、推包装置、夹包装置组成。
[0009]
可选的,所述装载机构和升降机构由液压动力系统组成,所述旋转机构有伺服电机驱动。
[0010]
可选的,所述旋转机构、升降机构和装载机构的输入端皆通过导线与控制器的输出端构成电连接,所述控制器的输入端与外界电源通过导线构成电连接。
[0011]
本实用新型的有益效果如下:
[0012]
本实用新型实施例提供一种自动装车机,通过转动结构,当需要装载时,机械手完成整垛货物码垛后,给出码垛完成信号,控制系统发出指令将整垛货物运送至待装车工位,同时机器人继续码垛,机器人将货物放置在码垛工位上,通过输送带传动至待装车工位,货物进入待装车工位后,自动装车机运行至待装车工位,控制系统对装载机构进行位置校准,准备装载货物时,叉齿叉起整垛货物后做预定仰角运动,在得到叉垛完成信号后,至待装车工位上时通过龙门架上的装载机构将整垛货物夹住,夹包装置加紧货物两侧,装载机构位置校准后,装载机构下探至预定位置,装载机构向前移动向控制系统发出完成装载信号,装载机构提升将货物提起并开始向运输车辆方向移动,通过升降机构抬高,在自动装车机龙门架的最前部,分别于上方、左右两侧安装激光距离传感器。在货物尚未接触到车辆前,通过龙门架架左右两侧的激光传感器测量与运输车辆侧面挡板的距离,经过计算后控制垛叉左右移动位置,达到对正运输车辆中心目的。用于获得运输车辆侧护板高度,控制垛叉提升到运输车辆高度以上。为保证精确对位,行走机构除采用伺服电机控制外,同时配备拉绳位移传感器再通过旋转机构转动移动至运输车辆上方,再通过升降机构下降将整垛货物放进运输车辆内部,当位于龙门架顶部的测距传感器检测到高度值发生突变时,记录突变的位置,作为运输车辆前端的定位,当货物移动到该定位时,降低货物高度,送开夹包装置将货物放置在车辆上,在进行推包将货物推进车内部,返回进行二次装载,省去人工操作的过程,提高了装载的效率,增加了装车机的实用性。
附图说明
[0013]
为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0014]
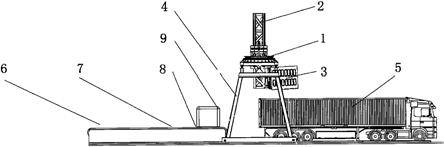
图1为本实用新型实施例的一种自动装车机的正视结构示意图。
[0015]
图中:1、旋转机构;2、升降机构;3、装载机构;4、龙门架; 5、运输车辆;6、码垛工位;7、输送带;8、待装车工位;9、整垛货物。
具体实施方式
[0016]
为了使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用
新型作进一步地详细描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
[0017]
下面将结合图1对本实用新型实施例的一种自动装车机进行详细的说明。
[0018]
参考图1所示,本实用新型实施例提供的一种自动装车机包括龙门架4,龙门架4上端转动安装有旋转机构1,旋转机构1中心内部活动安装有升降机构2,升降机构2右侧下端外壁安装有装载机构3,龙门架4左侧地面活动安装有输送带7,输送带7左侧上端有码垛工位6,输送带7右侧上端有待装车工位8,待装车工位8 上端活动有整垛货物9,龙门架4右侧活动有运输车辆5。
[0019]
参考图1所示,装载机构3由叉包装置、推包装置、夹包装置组成,当需要装载时,机械手完成整垛货物码垛后,给出码垛完成信号,控制系统发出指令将整垛货物运送至待装车工位8,同时机器人继续码垛,机器人将货物放置在码垛工位6上,通过输送带传动至待装车工位8,货物进入待装车工位8后,自动装车机运行至待装车工位8,控制系统对装载机构3进行位置校准,准备装载货物时,叉齿叉起整垛货物9后做预定仰角运动,在得到叉垛完成信号后,至待装车工位8上时通过龙门架4上的装载机构3将整垛货物9夹住,夹包装置加紧货物两侧,装载机构3位置校准后,装载机构3下探至预定位置,装载机构3向前移动向控制系统发出完成装载信号装载机构3提升将货物提起并开始向运输车辆5方向移动,通过升降机构2抬高,在自动装车机龙门架4的最前部,分别于上方、左右两侧安装激光距离传感器。在货物尚未接触到车辆前,通过龙门架4架左右两侧的激光传感器测量与运输车辆5侧面挡板的距离,经过计算后控制垛叉左右移动位置,达到对正运输车辆5 中心目的。用于获得运输车辆5侧护板高度,控制垛叉提升到运输车辆5高度以上。为保证精确对位,行走机构除采用伺服电机控制外,同时配备拉绳位移传感器再通过旋转机构1转动移动至运输车辆5上方,再通过升降机构2下降将整垛货物9放进运输车辆5内部,当位于龙门4架顶部的测距传感器检测到高度值发生突变时,记录突变的位置,作为运输车辆5前端的定位,当货物移动到该定位时,降低货物高度,送开夹包装置将货物放置在运输车辆5上,在进行推包将货物推进车内部,返回进行二次装载,省去人工操作的过程,提高了装载的效率,增加了装车机的实用性。
[0020]
参考图1所示,装载机构3和升降机构2由液压动力系统组成,旋转机构1有伺服电机驱动,当需要装载时,机械手完成整垛货物码垛后,给出码垛完成信号,控制系统发出指令将整垛货物运送至待装车工位8,同时机器人继续码垛,机器人将货物放置在码垛工位6上,通过输送带传动至待装车工位8,货物进入待装车工位8 后,自动装车机运行至待装车工位8,控制系统对装载机构3进行位置校准,准备装载货物时,叉齿叉起整垛货物9后做预定仰角运动,在得到叉垛完成信号后,至待装车工位8上时通过龙门架4上的装载机构3将整垛货物9夹住,夹包装置加紧货物两侧,装载机构3位置校准后,装载机构3下探至预定位置,装载机构3向前移动向控制系统发出完成装载信号装载机构3提升将货物提起并开始向运输车辆5方向移动,通过升降机构2抬高,在自动装车机龙门架4的最前部,分别于上方、左右两侧安装激光距离传感器。在货物尚未接触到车辆前,通过龙门架4架左右两侧的激光传感器测量与运输车辆5侧面挡板的距离,经过计算后控制垛叉左右移动位置,达到对正运输车辆5中心目的。用于获得运输车辆5侧护板高度,控制垛叉提升到运输车辆5高度以上。为保
证精确对位,行走机构除采用伺服电机控制外,同时配备拉绳位移传感器再通过旋转机构 1转动移动至运输车辆5上方,再通过升降机构2下降将整垛货物 9放进运输车辆5内部,当位于龙门4架顶部的测距传感器检测到高度值发生突变时,记录突变的位置,作为运输车辆5前端的定位,当货物移动到该定位时,降低货物高度,送开夹包装置将货物放置在运输车辆5上,在进行推包将货物推进车内部,返回进行二次装载,省去人工操作的过程,提高了装载的效率,增加了装车机的实用性。
[0021]
参考图1所示,旋转机构1、升降机构2和装载机构3的输入端皆通过导线与控制器的输出端构成电连接,控制器的输入端与外界电源通过导线构成电连接。
[0022]
本实用新型实施例提供一种自动装车机,当需要装载时,机械手完成整垛货物码垛后,给出码垛完成信号,控制系统发出指令将整垛货物运送至待装车工位8,同时机器人继续码垛,机器人将货物放置在码垛工位6上,通过输送带传动至待装车工位8,货物进入待装车工位8后,自动装车机运行至待装车工位8,控制系统对装载机构3进行位置校准,准备装载货物时,叉齿叉起整垛货物9 后做预定仰角运动,在得到叉垛完成信号后,至待装车工位8上时通过龙门架4上的装载机构3将整垛货物9夹住,夹包装置加紧货物两侧,装载机构3位置校准后,装载机构3下探至预定位置,装载机构3向前移动向控制系统发出完成装载信号装载机构3提升将货物提起并开始向运输车辆5方向移动,通过升降机构2抬高,在自动装车机龙门架4的最前部,分别于上方、左右两侧安装激光距离传感器。在货物尚未接触到车辆前,通过龙门架4架左右两侧的激光传感器测量与运输车辆5侧面挡板的距离,经过计算后控制垛叉左右移动位置,达到对正运输车辆5中心目的。用于获得运输车辆5侧护板高度,控制垛叉提升到运输车辆5高度以上。为保证精确对位,行走机构除采用伺服电机控制外,同时配备拉绳位移传感器再通过旋转机构1转动移动至运输车辆5上方,再通过升降机构 2下降将整垛货物9放进运输车辆5内部,当位于龙门4架顶部的测距传感器检测到高度值发生突变时,记录突变的位置,作为运输车辆5前端的定位,当货物移动到该定位时,降低货物高度,送开夹包装置将货物放置在运输车辆5上,在进行推包将货物推进车内部,返回进行二次装载。
[0023]
需要说明的是,本实用新型为一种自动装车机,包括旋转机构 1、升降机构2和装载机构3,部件均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
[0024]
显然,本领域的技术人员可以对本实用新型实施例进行各种改动和变型而不脱离本实用新型实施例的精神和范围。这样,倘若本实用新型实施例的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1