一种适合多高度的便捷型工件翻转装置的制作方法
[0001]
本实用新型涉及翻转装置的技术领域,尤其涉及一种适合多高度的便捷型工件翻转装置。
背景技术:
[0002]
单件或多件排列后的铁质长方体工件的对面翻转,大部分为人工翻面,在翻面过程中,存在工件较重,较脏的难题,且人工翻面后很难保证工件的位置精度,这样非常不利于实现工件磨削的全自动化。而且工件组合之后外形尺寸不固定、高度不固定,对面翻面存在困难。
技术实现要素:
[0003]
本实用新型旨在解决现有技术的不足,而提供一种适合多高度的便捷型工件翻转装置。
[0004]
本实用新型为实现上述目的,采用以下技术方案:
[0005]
一种适合多高度的便捷型工件翻转装置,包括本体支架和固定在本体支架上方的两个平行设置的支撑架体,两个支撑架体之间旋转安装有磁盘翻转机构,所述磁盘翻转机构连有翻转驱动机构,所述磁盘翻转机构上方固定有吸附磁盘,所述吸附磁盘用于对工件进行吸附,所述磁盘翻转机构用于对吸附磁盘及吸附的工件进行翻转,所述本体支架上滑动设有接料移出机构,所述接料移出机构上设有接料升降机构,所述接料移出机构带动接料升降机构移动并接近或远离磁盘翻转机构的下方,所述接料升降机构用于接收吸附磁盘吸附的工件。
[0006]
所述吸附磁盘为东莞市铭磁磁性工具有限公司的高精度cnc强力永磁磁盘。
[0007]
所述磁盘翻转机构包括位于两个支撑架体之间的翻转平台,所述翻转平台两侧固定有竖直的固定板,两个固定板外侧均连有转轴,两个转轴通过轴承座分别固定在两个支撑架体上,其中一个转轴通过传动链条与翻转驱动机构相连。
[0008]
所述翻转驱动机构固定在本体支架上,所述翻转驱动机构为伺服电机。
[0009]
所述吸附磁盘两侧壁上设有多个夹持凹槽,所述磁盘翻转机构的翻转平台上通过螺栓对应每个夹持凹槽固定有一个形夹持件,所述形夹持件的横板插接在夹持凹槽内实现对吸附磁盘的固定。
[0010]
所述接料移出机构包括固定在本体支架上的两个平行的滑轨以及滑动设置在两个滑轨上的移动平台,所述移动平台上固定有推移气缸,所述滑轨、推移气缸均与支撑架体平行设置,所述本体支架的一侧设有竖直的挡板,所述推移气缸的伸缩杆固定连接在挡板上。
[0011]
所述滑轨为工字形结构,所述移动平台底部对应两个滑轨设有两个滑块,所述滑块卡接并滑动设置于滑轨上。
[0012]
所述接料升降机构包括设置在移动平台上方的接料平台,所述接料平台底部中心
连接有升降气缸,所述升降气缸固定在移动平台上。
[0013]
所述接料平台底部四角设有四个定位柱,所述定位柱底部穿出移动平台底部。
[0014]
本实用新型的有益效果是:本实用新型是一种高精度的翻转装置,能够适应不同尺寸和组合后的不同高度的工件的翻转,翻转作业快速,适用性高,精度高。
附图说明
[0015]
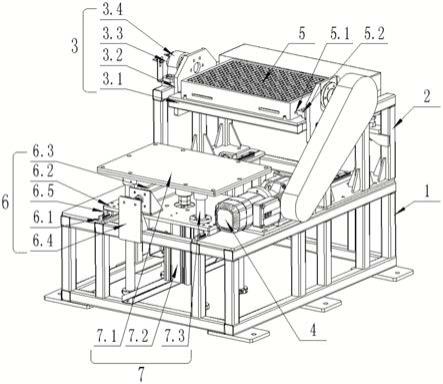
图1为本实用新型的结构示意图;
[0016]
图中:1-本体支架;2-支撑架体;3-磁盘翻转机构;3.1-翻转平台;3.2-固定板;3.3-转轴;3.4-轴承座;4-翻转驱动机构;5-吸附磁盘;5.1-夹持凹槽;5.2
-ꢀ“┓”
形夹持件;6-接料移出机构;6.1-滑轨;6.2-移动平台;6.3-推移气缸;6.4
-ꢀ
挡板;6.5-滑块;7-接料升降机构;7.1-接料平台;7.2-升降气缸;7.3-定位柱;
[0017]
以下将结合本实用新型的实施例参照附图进行详细叙述。
具体实施方式
[0018]
下面结合附图和实施例对本实用新型作进一步说明:
[0019]
如图1所示,一种适合多高度的便捷型工件翻转装置,包括本体支架1和固定在本体支架1上方的两个平行设置的支撑架体2,两个支撑架体2之间旋转安装有磁盘翻转机构3,所述磁盘翻转机构3连有翻转驱动机构4,所述磁盘翻转机构3上方固定有吸附磁盘5,所述吸附磁盘5用于对工件进行吸附,所述磁盘翻转机构3用于对吸附磁盘5及吸附的工件进行翻转,所述本体支架1上滑动设有接料移出机构6,所述接料移出机构6上设有接料升降机构7,所述接料移出机构6带动接料升降机构7移动并接近或远离磁盘翻转机构3的下方,所述接料升降机构7用于接收吸附磁盘5吸附的工件。
[0020]
所述吸附磁盘5为东莞市铭磁磁性工具有限公司的高精度cnc强力永磁磁盘。
[0021]
所述磁盘翻转机构3包括位于两个支撑架体2之间的翻转平台3.1,所述翻转平台3.1两侧固定有竖直的固定板3.2,两个固定板3.2外侧均连有转轴3.3,两个转轴3.3通过轴承座3.4分别固定在两个支撑架体2上,其中一个转轴3.3 通过传动链条与翻转驱动机构4相连。
[0022]
所述翻转驱动机构4固定在本体支架1上,所述翻转驱动机构4为伺服电机。
[0023]
所述吸附磁盘5两侧壁上设有多个夹持凹槽5.1,所述磁盘翻转机构3的翻转平台3.1上通过螺栓对应每个夹持凹槽5.1固定有一个
“┓”
形夹持件5.2,所述
“┓”
形夹持件5.2的横板插接在夹持凹槽5.1内实现对吸附磁盘5的固定。
[0024]
所述接料移出机构6包括固定在本体支架1上的两个平行的滑轨6.1以及滑动设置在两个滑轨6.1上的移动平台6.2,所述移动平台6.2上固定有推移气缸 6.3,所述滑轨6.1、推移气缸6.3均与支撑架体2平行设置,所述本体支架1的一侧设有竖直的挡板6.4,所述推移气缸6.3的伸缩杆固定连接在挡板6.4上。
[0025]
所述滑轨6.1为工字形结构,所述移动平台6.2底部对应两个滑轨6.1设有两个滑块6.5,所述滑块6.5卡接并滑动设置于滑轨6.1上。
[0026]
所述接料升降机构7包括设置在移动平台6.2上方的接料平台7.1,所述接料平台7.1底部中心连接有升降气缸7.2,所述升降气缸7.2固定在移动平台6.2 上。
[0027]
所述接料平台7.1底部四角设有四个定位柱7.3,所述定位柱7.3底部穿出移动平台6.2底部。
[0028]
本实用新型工作流程如下:
[0029]
装置附近的外部机器人将工件放置在吸附磁盘5上,放置到位后机器人回位;
[0030]
吸附磁盘5启动将工件牢牢吸附在上面;
[0031]
磁盘翻转机构3将吸附磁盘5及上面的工件整体翻转180
°
;
[0032]
接料移出机构6移动至接料工位,即吸附磁盘5的正下方;
[0033]
接料升降机构7上升,使接料平台7.1与工件接触;
[0034]
吸附磁盘5关闭,工件转移至接料平台7.1上;
[0035]
接料升降机构7下降;
[0036]
接料移出机构6将接料平台7.1上的工件移出至机器人抓取的位置。
[0037]
本实用新型是一种高精度的翻转装置,能够适应不同尺寸和组合后的不同高度的工件的翻转,翻转作业快速,适用性高,精度高。
[0038]
上面结合附图对本实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的各种改进,或未经改进直接应用于其它场合的,均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1