一种定位精度高且间距可调型工件翻面架的制作方法
[0001]
本实用新型涉及电池生产设备技术领域,尤其涉及一种定位精度高且间距可调型工件翻面架。
背景技术:
[0002]
在大重量的平板状工件如电池的生产过程中,需要在自动化加工工作站内设置相应的支撑架,来配合机器人对工件进行翻面。现有的翻面支撑架均按照加工工件的尺寸定制,若改变加工工件种类则需将翻面架整体拆卸并进行更换,这种方式操作繁琐、费时,降低了生产效率;现有的翻面支撑架仅由柔性吸盘直接支撑,因而在机器人将工件放下时易发生水平位置的偏移,降低了翻面精度。
技术实现要素:
[0003]
本实用新型旨在解决现有技术的不足,而提供一种定位精度高且间距可调型工件翻面架。
[0004]
本实用新型为实现上述目的,采用以下技术方案:
[0005]
一种定位精度高且间距可调型工件翻面架,包括:
[0006]
支撑架,支撑架竖直设置且底部固定连接在台面上;
[0007]
若干滑道,滑道位于支撑架顶部且均沿支撑架长度方向设置;
[0008]
若干支撑臂,部分或全部支撑臂与滑道滑动连接;
[0009]
若干定位机构,用于使支撑臂与滑道相对固定;
[0010]
若干防滑垫,防滑垫位于支撑臂上,用于避免放置到支撑臂上的工件发生位移;
[0011]
若干吸盘,吸盘用于吸附放置到支撑臂上的工件。
[0012]
进一步的,滑道共设有两条且每条包括两个互相平行的条形孔。
[0013]
进一步的,支撑臂共设有四条,一条支撑臂与支撑架固定连接且两条滑道分别位于其两侧,两条支撑臂均在同一条滑道上,另一条支撑臂在另一条滑道上。
[0014]
进一步的,定位机构为若干螺栓,螺栓穿过条形孔并旋入支撑臂上的螺孔内。
[0015]
进一步的,防滑垫为矩形,防滑垫上设有若干圆形缺口,吸盘位于防滑垫的缺口内。
[0016]
进一步的,吸盘为气动柔性吸盘或带有缓冲层的电磁吸盘。
[0017]
本实用新型的有益效果是:本实用新型的支撑臂仅通过防滑垫与工件接触,吸盘动作将工件紧紧吸附,防滑垫有效防止了由于设备振动导致工件发生偏移的情况;需要改变加工工件种类时,调整支撑臂在滑道上的位置,使支撑臂的排布与对应工件种类相对应即可,而无需将整个翻面架拆下,提高了生产效率。
附图说明
[0018]
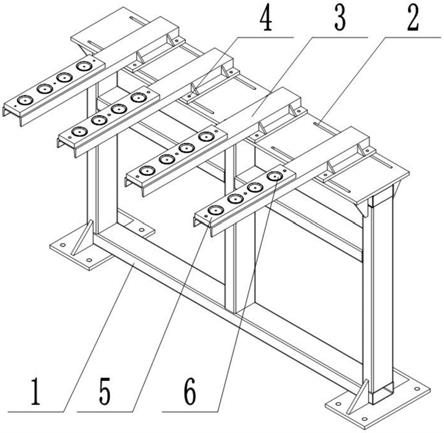
图1为本实用新型的结构示意图;
[0019]
图中:1-支撑架;2-滑道;3-支撑臂;4-定位机构;5-防滑垫;6-吸盘;
[0020]
以下将结合本实用新型的实施例参照附图进行详细叙述。
具体实施方式
[0021]
下面结合附图和实施例对本实用新型作进一步说明:
[0022]
如图所示,一种定位精度高且间距可调型工件翻面架,包括:
[0023]
支撑架1,支撑架1竖直设置且底部固定连接在台面上;
[0024]
若干滑道2,滑道2位于支撑架1顶部且均沿支撑架1长度方向设置;
[0025]
若干支撑臂3,部分或全部支撑臂3与滑道2滑动连接;
[0026]
若干定位机构4,用于使支撑臂3与滑道2相对固定;
[0027]
若干防滑垫5,防滑垫5位于支撑臂3上,用于避免放置到支撑臂3上的工件发生位移;
[0028]
若干吸盘6,吸盘6用于吸附放置到支撑臂3上的工件。
[0029]
进一步的,滑道2共设有两条且每条包括两个互相平行的条形孔。
[0030]
进一步的,支撑臂3共设有四条,一条支撑臂3与支撑架1固定连接且两条滑道分别位于其两侧,两条支撑臂3均在同一条滑道2上,另一条支撑臂3在另一条滑道2上。
[0031]
进一步的,定位机构4为若干螺栓,螺栓穿过条形孔并旋入支撑臂3上的螺孔内。
[0032]
进一步的,防滑垫5为矩形,防滑垫5上设有若干圆形缺口,吸盘6位于防滑垫5的缺口内。
[0033]
进一步的,吸盘6为气动柔性吸盘或带有缓冲层的电磁吸盘。
[0034]
本实用新型使用时,机器人将工件夹持并放置到支撑臂3上,此时支撑臂3仅通过防滑垫5与工件接触,吸盘6动作将工件紧紧吸附,进一步增加了防滑垫5的摩擦力,有效防止了由于设备振动导致工件发生偏移的情况;当需要改变加工工件种类时,将螺栓旋松并调整支撑臂3在滑道2上的位置,使支撑臂3的排布与对应工件种类相对应,再将螺栓旋紧固定即可,而无需将整个翻面架拆下,提高了生产效率。
[0035]
上面结合附图对本实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的各种改进,或未经改进直接应用于其它场合的,均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1