一种双工作斗防干涉装置的制作方法
[0001]
本实用新型涉及高空作业车,具体地讲,涉及一种双斗高空作业车的双工作斗防干涉装置。
背景技术:
[0002]
随着社会的发展,人们对高空作业的安全性要求日益增加,高空作业使用高空作业车已成为必然。而随着高空作业车的广泛使用,人们对其功能的多样性、设备的安全性等要求也越来越高。在安全性上,防止使用者误操作而导致的危险是其中一项基本安全功能,这其中最主要的就是自身的防干涉功能;在多样性上,特别是带电作业行业,不再满足于原有单个工作斗的常规作业,需要拥有双工作斗的高空作业车。这时双工作斗如何防干涉成为一个必须面临的技术点,若全部采用传感器智能检测控制,则相比原有单工作斗控制系统会有很大的变动,成本势必大幅增加。虽然人们对高空作业车的配置要求越来越高,但作为购买者对价格却始终比较敏感,并不会水涨船高。
[0003]
这时,如何设计出一种双工作斗防干涉装置,满足功能且又成本适合,成为我们需要解决的技术问题。
技术实现要素:
[0004]
本实用新型的目的在于克服现有技术中存在的上述不足,而提供一种成本低、简单易行的双工作斗防干涉装置。
[0005]
本实用新型解决上述问题所采用的技术方案是:一种双工作斗防干涉装置,所述双工作斗包括左工作斗和右工作斗,左工作斗和右工作斗均单独能在水平面内转动地安装在一个转臂上,所述转臂能在水平面内转动地安装在高空作业车的工作臂的端部;其特征在于:所述双工作斗防干涉装置包括两个回转编码器和一个回转挡板;其中一个回转编码器用于检测左工作斗相对于转臂的回转角度,用于防止左工作斗在回转过程中与高空作业车的工作臂以及右工作斗发生干涉;另一个回转编码器用于检测转臂相对于高空作业车的工作臂的回转角度,用于防止转臂在回转过程中,左工作斗或右工作斗与高空作业车的工作臂发生干涉;所述回转挡板安装在转臂上,用于限制右工作斗相对于转臂的回转角度,防止右工作斗在回转过程中与高空作业车的工作臂以及左工作斗发生干涉。
[0006]
优选的,所述回转挡板具有呈圆环片状的本体,在本体的周向边沿处设置有左挡块和右挡块。
[0007]
优选的,所述转臂通过转臂立柱安装在高空作业车的工作臂的端部。
[0008]
优选的,所述用于检测转臂相对于高空作业车的工作臂的回转角度的回转编码器安装在转臂立柱或者转臂上。
[0009]
优选的,所述用于检测左工作斗相对于转臂的回转角度的回转编码器安装在左工作斗或者转臂上。
[0010]
本实用新型与现有技术相比,具有以下优点和效果:通过回转编码器和回转挡板
相结合,实现两个工作斗之间的防干涉,也实现工作斗和工作臂之间的防干涉;在回转空间受限的左工作斗上采用回转编码器检测并限制回转角度,使其拥有防干涉功能,同时保证了其回转范围足够大,而在回转空间足够广阔的右工作斗上采用简易的挡块限制回转角度,成本低廉,又不影响其回转范围。
附图说明
[0011]
为了更清楚地说明本实用新型具体实施方式或现有技术中的方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0012]
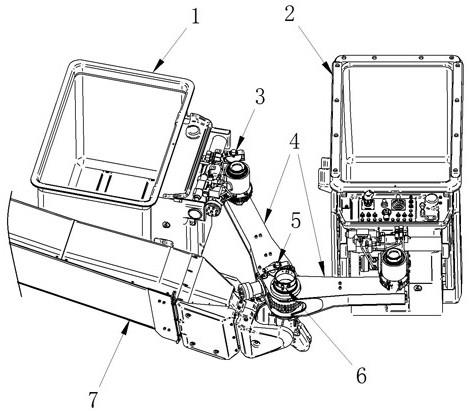
图1是安装有本实用新型实施例防干涉装置的双工作斗装置的立体结构示意图。
[0013]
图2是本实用新型实施例中回转挡板安装在转臂4与右工作斗2的连接处的结构示意图。
[0014]
图3是示意无回转编码器实时检测时,左工作斗的回转角度范围。
[0015]
图4是示意有回转编码器实时检测时,两个工作斗的回转角度范围。
[0016]
附图标记说明:左工作斗1、右工作斗2、斗回转编码器3、转臂4、转臂回转编码器5、转臂立柱6、工作臂7、回转挡板4-1、左挡块411、右挡块412。
具体实施方式
[0017]
下面结合附图并通过实施例对本实用新型作进一步的详细说明,以下实施例是对本实用新型的解释而本实用新型并不局限于以下实施例。
[0018]
实施例。
[0019]
参见图1至图4。
[0020]
本实施例中公开了一种双工作斗防干涉装置,双工作斗包括左工作斗1和右工作斗2,左工作斗1和右工作斗2均单独能在水平面内转动地安装在一个转臂4上,转臂4能在水平面内转动地安装在高空作业车的工作臂7的端部。具体地讲,转臂4通过转臂立柱6安装在高空作业车的工作臂7的端部,转臂立柱6与工作臂7连接,两者之间无水平回转动作。
[0021]
本实施例双工作斗防干涉装置包括两个回转编码器和一个回转挡板4-1,两个回转编码器分别为斗回转编码器3和转臂回转编码器5。
[0022]
参见图3,由于左工作斗1位于右工作斗2与工作臂7之间,使得左工作斗1的回转空间受限,只有较小的α角,才能保证左工作斗1与两侧的右工作斗2和工作臂7不发生干涉。在不采用回转编码器的情况下,因为控制系统无法获知左工作斗1的具体位置,为避免发生干涉,则其回转角度在任何状态下只能按图3的α角。
[0023]
因此,将斗回转编码器3安装于左工作斗1上,用于检测左工作斗1相对于转臂4的回转角度,用于防止左工作斗1在回转过程中与高空作业车的工作臂7以及右工作斗2发生干涉。将转臂回转编码器5安装在转臂4上,用于检测转臂4相对于高空作业车的工作臂7的回转角度,用于防止转臂4在回转过程中,左工作斗1或右工作斗2与高空作业车的工作臂7发生干涉。
[0024]
通过实时检测左工作斗1和转臂4 的回转角度,得到左工作斗1相对工作臂7的回
转角度,就能进行有效的限制或放开左工作斗1的回转角度,此时见图4,左工作斗1的回转角度可以达到一个大很多的β角。
[0025]
本实施例中,右工作斗2处于外侧,回转空间广阔,无需采用实时检测其回转角度可获得较大的回转角度范围,见图4的γ角。因此,在转臂4与右工作斗2的连接处采用回转挡板4-1结构用于限制右工作斗2的回转角度范围,具体地讲,回转挡板4-1安装在转臂4上,用于限制右工作斗2相对于转臂4的回转角度,防止右工作斗2在回转过程中与高空作业车的工作臂7以及左工作斗1发生干涉。回转挡板4-1具有呈圆环片状的本体,在本体的周向边沿处设置有左挡块411和右挡块412。
[0026]
当右工作斗2左回转至与左挡块411相撞时,左回转被限制,无法再继续左回转;当右工作斗2右回转至与右挡块412相撞时,右回转被限制,无法再继续右回转。这样就有效地限制了右工作斗2的回转角度范围。
[0027]
本防干涉装置充分利用了两个工作斗的布局特点,不一味地追求复杂的智能化,以较小的成本实现双工作斗的防干涉,同时也确保了较大的双工作斗回转作业范围。
[0028]
此外,需要说明的是,本说明书中所描述的具体实施例,其零、部件的形状、所取名称等可以不同,本说明书中所描述的以上内容仅仅是对本实用新型结构所作的举例说明。凡依据本实用新型专利构思的构造、特征及原理所做的等效变化或者简单变化,均包括于本实用新型专利的保护范围内。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离本实用新型的结构或者超越本权利要求书所定义的范围,均应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1