一种抓抱机器的制作方法
1.本实用新型涉及搬运技术领域,特别是涉及用于大型胶带母卷等重型物料搬运用的抓抱机器。
背景技术:
2.近年来,随着我国自动化程度的提升,大型筒状物品由于表面圆滑且重量中,需要至少3个人人工搬运,费力费时,搬运到升降车上,升降车上设有半圆形的托盘,在通过叉车搬运,另外还需要人工搬运至自制车轮架子上运输,运输过程中首先无法转向,卸料时需要人工立起来,另外,高度无法调整,物品与自制车轮架子无法贴合,运输会造成掉落,半圆形的托盘在运输中造成胶带母卷刮伤,采用两台设备才能达到运输作用。
技术实现要素:
3.为了克服上述现有技术的不足,本实用新型提供了一种实现了通过一台设备就实现抱夹、翻转、前后移动、上下升降等功能的抓抱机器。
4.本实用新型所采用的技术方案是:一种抓抱机器,包括:
5.抓抱机构,抓抱机构侧端固定有支撑板,支撑板上固定有抓手,抓手与支撑板区间设有驱动杆,驱动杆通过小型气缸控制抓手扩展或闭合动作,所述抓手设置为u型弯钩结构,以供给大型胶带母卷在其上固定收紧支撑以及主动移动后输送用,所述抓手一端设有抓手动作控制机构;
6.支撑机构,具有固定架和上升平台,以及与固定架连接为一体的气缸机架,所述固定架上设有至少二组位移气缸,所述位移气缸上设有丝杆,所述丝杆通过旋转机构与抓抱机构连接;
7.旋转机构,一端通过转轴轮连接在抓抱机构上旋转,靠近转轴轮位置处还设有旋转油缸,所述转轴轮与支撑板相连接,转轴轮下端设有活动的上升或下降油缸,旋转机构固定设置于支撑机构上,所述旋转机构设置于抓抱机构一侧,旋转机构带动抓抱机构旋转;
8.控制动作机构,一端通过第一油缸管连接在抓手的小型气缸端部,一端通过第二油缸管连接在转轴轮自由端,另一端通过第三油缸管连接在上升平台的顶部 。
9.优选地,抓手靠近抓取部位内围包覆有软性垫,所述软性垫分段均匀设置于抓手内部。
10.优选地,所述支撑机构上设有抓抱机器退进控制按钮。
11.优选地,所述固定架侧端设有升降按钮、旋转按钮和抓抱展紧按钮 。
12.优选地,支撑机构下端设有支撑架,所述支撑架的侧部还连接有滚轮组件,滚轮组件通过抓抱机器退进控制按钮进行前进或后退指令动作,支撑架与滚轮组件形成一前后走车,滚轮组件通过驱动电机供能。
13.优选地,所述支撑架设置为工字形结构。
14.优选地,所述上升平台在升降按钮控制下进行升降动作。
15.优选地,所述转轴轮通过旋转按钮进行旋转动作。
16.优选地,抓手固定在固定架之间。
17.优选地,所述抓抱展紧按钮用于控制驱动杆将抓手做扩展或闭合动作。
18.与现有技术相比,本实用新型的有益效果是:
19.抓抱机构,抓抱机构侧端固定有支撑板,支撑板上固定有抓手,抓手与支撑板区间设有驱动杆,驱动杆通过小型气缸控制抓手扩展或闭合动作,所述抓手设置为u型弯钩结构,以供给大型胶带母卷在其上固定收紧支撑以及主动移动后输送用,所述抓手一端设有抓手动作控制机构;支撑机构,具有固定架和上升平台,以及与固定架连接为一体的气缸机架,所述固定架上设有至少二组位移气缸,所述位移气缸上设有丝杆,所述丝杆通过旋转机构与抓抱机构连接;旋转机构,一端通过转轴轮连接在抓抱机构上旋转,靠近转轴轮位置处还设有旋转油缸,所述转轴轮与支撑板相连接,转轴轮下端设有活动的上升或下降油缸,旋转机构固定设置于支撑机构上,所述旋转机构设置于抓抱机构一侧,旋转机构带动抓抱机构旋转。控制动作机构,一端通过第一油缸管连接在抓手的小型气缸端部,一端通过第二油缸管连接在转轴轮自由端,另一端通过第三油缸管连接在上升平台的顶部。
20.通过抓抱机构、旋转机构、支撑机构和控制动作机构将重型卷形物料实现抱夹物料、将抱紧后物料翻转、前后移动、带动物料进行上下升降等功能的抓抱机器,整个抓抱机器方便运输。自动化程度高,只需按钮即可进行物料运输,省时省力,不伤害胶带母卷外表,有利于运输和传送。
附图说明
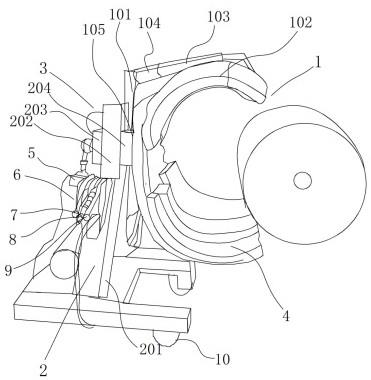
21.图1为抓抱机器的抓料状态结构图。
22.图2为抓抱机器的抓手卸料松开状态结构图。
23.图3为抓抱机器的旋转机构结构示意图。
24.图4为抓抱机器的抓抱机构结构示意图。
25.图5为抓抱机器的运车示意图。
26.其中:1-支撑杆,2-支撑座,21-固定卡槽,22-弧形滑槽;3-扶手,31-水平滑槽;4-固定板,5-转轴,6-限位拉杆,7-拉簧,8-拉绳,9-拉手,91-限位突起;10-固定拉手,1001-拉手滑槽;11-支撑底板,12-滚轮组件,13-滚轮转轴,14-支撑耳片,15-护罩。
具体实施方式
27.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
28.在本实用新型的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的组合或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。另外,本实用新型实施例的描述过程中,所有图中的“上”、“下”、“前”、“后”、“左”、“右”等器件位置关系,均以图1为标
准。
29.如图1-2所示,一种抓抱机器,包括:抓抱机构1、支撑机构2和旋转机构3。
30.如图4所示,抓抱机构1,抓抱机构侧端固定有支撑板101,支撑板101上固定有抓手102,抓手102与支撑板101区间设有驱动杆103,驱动杆103通过小型气缸104控制抓手扩展或闭合动作,所述抓手102设置为u型弯钩结构,以供给大型胶带母卷在其上固定收紧支撑以及主动移动后输送用,所述抓手102一端设有抓手动作控制机构105;抓手102靠近抓取部位内围包覆有软性垫4,所述软性垫4分段均匀设置于抓手102内部。
31.支撑机构2,具有固定架201和上升平台202,以及与固定架201连接为一体的气缸机架203,所述固定架201上设有至少二组位移气缸204,所述位移气缸204上设有丝杆205,所述丝杆205通过旋转机构3与抓抱机构1连接;所述支撑机构2上设有抓抱机器退进控制按钮5,所述固定架201侧端设有升降按钮7、旋转按钮8和抓抱展紧按钮9 ,所述抓抱展紧按钮9用于控制驱动杆103将抓手做扩展或闭合动作。
32.如图5所示,支撑机构2下端设有支撑架206,所述支撑架206的侧部还连接有滚轮组件10,滚轮组件10通过抓抱机器退进控制按钮5进行前进或后退指令动作,支撑架206与滚轮组件10形成一前后走车,滚轮组件10通过驱动电机供能,所述支撑架206设置为工字形结构,所述上升平台202在升降按钮7控制下进行升降动作。抓手102固定在固定架201之间。
33.如图3所示,旋转机构3,一端通过转轴轮301连接在抓抱机构1上旋转,靠近转轴轮301位置处还设有旋转油缸302,所述转轴轮301与支撑板101相连接,转轴轮301下端设有活动的上升或下降油缸303,旋转机构3固定设置于支撑机构2上,所述旋转机构3设置于抓抱机构1一侧,旋转机构3带动抓抱机构1旋转。
34.控制动作机构6,一端通过第一油缸管601连接在抓手102的小型气缸104端部,一端通过第二油缸管602连接在转轴轮301自由端,另一端通过第三油缸管603连接在上升平台202的顶部 , 所述转轴轮301通过旋转按钮8进行旋转动作。
35.本实用新型抓抱机器的运行过程为:按下一侧升降抬高按钮7,抓抱机构1在位移气缸204作用下通过丝杆205将其往上抬高,抬高至设定位置后,按下抓抱机器退进控制按钮5,滚轮组件10通过抓抱机器退进控制按钮5进行前进指令动作,前进至胶带母卷后停止,此时,驱动杆103通过小型气缸104控制抓手出于展开状态,按下抓抱展紧按钮9,驱动杆103拉伸延长将抓手102紧闭,抓手102靠近抓取部位内围包覆有软性垫4,抓手臂压紧卷料,软性垫4起到很好的保护卷料外表作用,软性垫4紧紧贴合卷料,抱紧后呈现2/3抱住状态,抓手弧度与卷料弧度一致,按下抓抱机器退进控制按钮5,滚轮组件10带动支撑机构2往后退,退到指定位置后,将卷料内围支撑杆拆除,重新放置于母卷设备中,将运输板放置于抓抱机构1下端,按下旋转按钮8,抓手102带动胶带母卷逆时针旋转90度,按下升降按钮7,抓抱机构1在位移气缸204作用下通过丝杆205将其往下降低,卷料处于垂直状态落至运输板上,再将运输板运输至其他位置进行下个程序,通过抓抱机构、旋转机构、支撑机构和控制动作机构将重型卷形物料实现抱夹物料、将抱紧后物料翻转、前后移动、带动物料进行上下升降等功能的抓抱机器,整个抓抱机器方便运输。自动化程度高,只需按钮即可进行物料运输,省时省力,不伤害胶带母卷外表,有利于运输和传送。
36.本实用新型的实施例公布的是较佳的实施例,但并不局限于此,本领域的普通技术人员,极易根据上述实施例,领会本实用新型的精神,并做出不同的引申和变化,但只要
不脱离本实用新型的精神,都在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1