一种折臂吊用转台的制作方法
[0001]
本发明属于折臂吊及其控制技术领域,尤其涉及一种折臂吊用转台。
背景技术:
[0002]
随着城市化进程,城市区域不断扩大,城乡结合规模越来越明显,城市生活垃圾问题也愈发严重,如何有效快捷地处理城市生活垃圾逐渐成为城市管理中的一大难题。城市中的垃圾箱大小是根据区域居住周边人口来决定的,在一些城市建设还未齐全的区域,垃圾站的建设也没有配置齐全,现就存在垃圾收集的问题,采用建设垃圾压缩站,由于不满足建设标准而无法实施,采用人工收集成本高。
[0003]
垃圾车是垃圾处理的重要手段之一,随着生活垃圾的数量不断增加,出现了深埋桶垃圾收集系统进行垃圾收集运输,配套的全封闭地埋桶保证了垃圾不会裸露在周围的地面以影响环境,同时封闭式的设计也避免了异味对环境的破坏。
[0004]
针对上述问题,有必要研发一种新的设备,把压缩垃圾车与折臂吊相结合的折臂式压缩垃圾车。在该设备研发过程中,研发人员发现并解决如下问题:
[0005]
1)折臂吊与压缩垃圾车相结合的连接部件需要使用机座,机座需保证起重作业时受力均匀,安装整体不超高,重量轻,安装方便;
[0006]
2)传统的随车起重机,主油缸安装在转台侧面,要求转台高度较高,在针对传统的安装在汽车底盘上的起重机时,传统结构不会导致车辆高度超高,使用情况良好,但针对安装在吊装式垃圾车顶部时,此转台结构造成车辆超高,吊装不稳定,不适合安装在吊装式垃圾车顶部;
[0007]
3)如何配置一套适合折臂吊的控制系统,保证所有的功能及安全;
[0008]
4)如何设计折臂吊的各部件并有效组装。
技术实现要素:
[0009]
本发明提供一种折臂吊用转台,通过合理设计,在垃圾车箱体上安装折臂吊时实现整车不超高。
[0010]
一种折臂吊用转台,包括:法兰板、至少两块侧板、上盖板、下盖板,所述侧板包括:侧板连接端部、侧板中部、侧板前斜部、侧板前部呈弯钩形,所述侧板连接端部焊接在法兰板上,所述侧板前斜部的最高位置处设置大臂变幅油缸铰接点,所述侧板前部的下端设置大臂铰接点,所述大臂变幅油缸铰接点位置高于大臂铰接点。
[0011]
进一步地,在其中一块侧板的外侧大臂铰接点和大臂变幅油缸铰接点附近设置耳板限位板,用于限制大臂和大臂变幅油缸的安装防止销轴旋转。
[0012]
进一步地,所述上盖板和下盖板的长度与侧板的侧板连接端部、侧板中部对应,在对应侧板前斜部的位置焊接大臂变幅油缸铰接加强座,所述大臂变幅油缸铰接加强座上设置孔位对应大臂变幅油缸铰接点,并在孔位内侧加入大臂变幅油缸铰接轴套,用于安装大臂变幅油缸。
[0013]
进一步地,所述大臂变幅油缸铰接加强座由板材焊接而成。
[0014]
进一步地,在对应侧板前部的位置焊接大臂铰接加强板,所述大臂铰接加强板上设置孔位对应大臂铰接点,并在孔位内侧加入大臂铰接轴套,用于安装大臂。
[0015]
进一步地,所述上盖板与法兰板焊接处内侧加入加强板加强连接。
[0016]
进一步地,所述法兰板的下部加入加强圈。
[0017]
进一步地,所述上盖板、下盖板开孔用于布置管路。
[0018]
进一步地,所述法兰板使用螺栓连接到转台支撑上,在法兰板上安装转台回转限位板,与转台支撑安装时安装在机座上的回转限位柱配合,限制整个折臂吊旋转的极限位置。
[0019]
进一步地,所述回转限位柱安装在机座的左侧,所述转台回转限位板安装在法兰板的左侧。
[0020]
该转台3的优点包括:法兰板301底部设有底加强圈305,与上部法兰板301焊接,减少法兰板301加工余量及焊接变形,法兰板301下部与回转支撑2用高强螺栓连接;法兰板 301上部与左侧板、右侧板、上盖板、下盖板焊接,整体采用薄板式焊接设计,各铰点位置局部加强,在保证强度、安全的前提下,大大降低了产品重量;在转台上方、下方开孔,便于布置管路,美观,同时降低了产品重量;大臂变幅油缸铰接点313设在主体框架的前上方,由五块薄板焊接呈大臂变幅油缸铰接加强座308为铰点提供框架,并焊接轴套对铰点位置进行加强,安装油缸铰点上置,保证油缸在转台侧上方,大大降低了转台高度;大臂铰接点312 设在主体框架前下方,加入大臂铰接加强板306为铰点提供支撑,焊接轴套对铰点位置进行加强,大臂连接铰点置于油缸铰点下方,利于安装,降低转台高度;两铰点外侧设有耳板限位板310,既能防止销轴旋转,在安装开口销后又能防止销轴退出;回转限位板限制折臂吊只能往右侧旋转,不会旋转到道路中央。
附图说明
[0021]
图1折臂吊机座前视图;
[0022]
图2折臂吊机座俯视图;
[0023]
图3折臂吊机座三维结构视图;
[0024]
图4折臂吊机座三维爆炸结构视图;
[0025]
图5折臂吊机座安装结构示意图;
[0026]
图6折臂吊机座螺栓安装结构示意图;
[0027]
图7折臂吊机座与回转支撑安装结构图;
[0028]
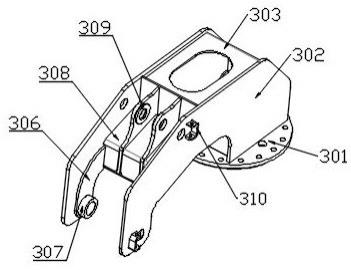
图8折臂吊转台前视图;
[0029]
图9折臂吊转台俯视图;
[0030]
图10折臂吊转台三维视图;
[0031]
图11折臂吊转台三维爆炸结构图;
[0032]
图12折臂吊转台安装结构图;
[0033]
图13折臂吊前视图;
[0034]
图14折臂吊三维视图;
[0035]
图15折臂吊折臂部分前视图;
51、螺母1-52、卡板1-53,所述卡板1-53卡紧螺栓孔1-4起限位作用,所述高强螺栓1-5可以是骑马螺栓或双头丝杆,所述机座1上部的回转支撑连接板108通过螺栓安装回转支撑2,所述回转支撑2包括回转控制装置201、回转限位柱202,所述回转控制装置201接收控制系统的信号控制回转方向和角度,所述回转限位柱202通过螺栓安装在限位柱安装板109上;
[0050]
该机座1的优点包括:所述机座1是板材焊接而成,采用弓形箱体设计,起重作业时机座受力均匀,不会出现支点受力不均导致的结构件变形;所述机座1外形设计采用两端宽中间窄外形,减轻结构件重量;所述机座1是安装在压缩垃圾车0箱体顶部的折臂吊机座,结构与垃圾压缩车箱体外形相似,不占用高度空间,设备安装整体不超高;所述机座1采用高强螺栓1-5连接,安装方便使设备的通用性更强;所述机座1的安装孔螺栓孔1-4是腰型孔,安装方便减少结构件制作难度;所述机座1与压缩垃圾车0连接采用四点定位,支撑方式可靠连接稳定。
[0051]
一种折臂吊用转台3,如附图8~11所示,包括:法兰板301、两块侧板302、上盖板303、下盖板304,焊接成转台主体框架,所述侧板302包括:侧板连接端部3-1、侧板中部3-2、侧板前斜部3-3、侧板前部3-4呈弯钩形,所述侧板连接端部3-1焊接在法兰板301上,所述侧板前斜部3-3的最高位置处设置大臂变幅油缸铰接点313,所述侧板前部3-4的下端设置大臂铰接点312,所述大臂变幅油缸铰接点313位置高于大臂铰接点312,在之中一块侧板 302的外侧大臂铰接点312和大臂变幅油缸铰接点313附近设置耳板限位板310,用于限制大臂4和大臂变幅油缸5的安装防止销轴旋转,所述法兰板301的下部加入加强圈305,所述上盖板303和下盖板304的长度与侧板302的侧板连接端部3-1、侧板中部3-2对应,在对应侧板前斜部3-3的位置焊接大臂变幅油缸铰接加强座308,所述大臂变幅油缸铰接加强座 308上设置孔位对应大臂变幅油缸铰接点313,并在孔位内侧加入大臂变幅油缸铰接轴套309,用于安装大臂变幅油缸5,所述大臂变幅油缸铰接加强座308由板材焊接而成,在对应侧板前部3-4的位置焊接大臂铰接加强板306,所述大臂铰接加强板306上设置孔位对应大臂铰接点312,并在孔位内侧加入大臂铰接轴套307,用于安装大臂4,所述上盖板303与法兰板 301焊接处内侧加入加强板311加强连接,所述上盖板303、下盖板304开孔用于布置管路,各连接部位焊接完成后,整体上机床加工,保证产品精度,该转台3的主要优点是高度低、重量轻;
[0052]
一种折臂吊用转台3的连接方式,如附图12所示,所述法兰板301使用螺栓连接到转台支撑2上,在法兰板301上安装转台回转限位板314,与转台支撑2安装时安装在机座1上的回转限位柱202配合,限制整个折臂吊旋转的极限位置,所述回转限位柱202安装在机座 1的左侧,所述转台回转限位板314安装在法兰板301的左侧,从而使折臂吊安装在压缩垃圾车0上时,折臂吊只能往右侧旋转,不会旋转到道路中央;
[0053]
该转台3的优点包括:法兰板301底部设有底加强圈305,与上部法兰板301焊接,减少法兰板301加工余量及焊接变形,法兰板301下部与回转支撑2用高强螺栓连接;法兰板 301上部与左侧板、右侧板、上盖板、下盖板焊接,整体采用薄板式焊接设计,各铰点位置局部加强,在保证强度、安全的前提下,大大降低了产品重量;在转台上方、下方开孔,便于布置管路,美观,同时降低了产品重量;大臂变幅油缸铰接点313设在主体框架的前上方,由五块薄板焊接呈大臂变幅油缸铰接加强座308为铰点提供框架,并焊接轴套对铰点位置进行加强,安装油缸铰点上置,保证油缸在转台侧上方,大大降低了转台高度;大臂铰接点312 设在主体框架前下方,加入大臂铰接加强板306为铰点提供支撑,焊接轴套对铰点位置进行
加强,大臂连接铰点置于油缸铰点下方,利于安装,降低转台高度;两铰点外侧设有耳板限位板310,既能防止销轴旋转,在安装开口销后又能防止销轴退出。
[0054]
一种折臂吊,如附图13~14所示,包括:
[0055]
机座1,用于为折臂吊提供安装基础,机座1连接到压缩垃圾车0上,上部连接转台支撑2,所述机座1采用薄板焊接而成为一个弓形箱体,所述弓形箱体贴合压缩垃圾车0的箱体;
[0056]
转台支撑2,提供折臂吊旋转的基础,控制折臂吊顺时针或逆时针方向旋转;
[0057]
转台3,安装到转台支撑2上,提供连接转台支撑2与大臂4的基础,并设置大臂4和大臂变幅油缸5的铰接点,所述转台3采用薄板焊接而成,大臂变幅油缸铰接点313位于转台3前上方,大臂铰接点312位于转台3前下方;
[0058]
大臂4,尾端铰接在转台3的大臂铰接点312上,在大臂变幅油缸5的推拉下可沿转台3 上的大臂铰接轴旋转;
[0059]
大臂变幅油缸5,尾端铰接在转台3的大臂变幅油缸铰接点313上,首端铰接在焊接到大臂4中部的第一连接板7上,用于提供驱动大臂4旋转的动力;
[0060]
折臂变幅油缸6,尾端铰接在第一连接板7,首端铰接在焊接到折臂9的第二连接板8上,用于提供驱动折臂9旋转的动力;
[0061]
第一连接板7,焊接在大臂4中部,用于提供大臂变幅油缸5首端和折臂变幅油缸6尾端的铰接位置;
[0062]
第二连接板8,包括:主连接板801、第一条形连接板802、第二条形连接板803,所述主连接板801焊接在折臂9的尾端并与大臂4的首端铰接,第一条形连接板802与主连接板 801铰接,第二条形连接板803一端与第一条形连接板802铰接,另一端与大臂4的首端铰接,第一条形连接板802与第二条形连接板803构成一个三角形结构,折臂变幅油缸6的首端铰接在第二条形连接板803一端与第一条形连接板802铰接的轴上,用于提供铰接位置并构成一个三角形的受力结构;
[0063]
折臂9,尾端铰接到第一条形连接板802上,折臂9首端连接挂钩10;
[0064]
所有铰接点外侧一侧附近均设置耳板限位板,用于限制被铰接的部件的安装防止销轴旋转。
[0065]
一种折臂吊的折臂9,如附图15~16所示,包括:折臂基本臂901、折臂伸缩臂902、折臂伸缩油缸903,所述折臂基本臂901和折臂伸缩臂902采用空心管状结构,所述折臂伸缩臂902插入折臂基本臂901的管体空腔内,所述折臂伸缩油缸903位于折臂伸缩臂902和折臂基本臂901的管体空腔内,且其尾端铰接在折臂伸缩臂902的首端,其首端铰接在折臂基本臂901的尾端,所述折臂基本臂901的尾端焊接主连接板801,主连接板801上开轴孔插入折臂伸缩油缸903的铰接轴,所述折臂基本臂901的尾端设置托杆904,所述托杆904承托折臂伸缩油缸903的首端,所述折臂伸缩臂902的尾端设置托环905,所述托环905承托折臂伸缩油缸903的油缸首端,所述托杆904和托环905用于控制折臂伸缩臂902沿直线伸缩。
[0066]
一种折臂吊的控制系统,包括:遥控器、收发器、电控箱控制器、传感器、主阀、液压系统、报警装置;
[0067]
所述电控箱控制器用来接收来自遥控器、传感器信号并进行处理;所述遥控器其上包括显示屏和控制按钮;
[0068]
所述遥控器控制按钮用来发出指令,并传递给电控箱控制器,所述控制按钮包括:电源、急停、回转、变幅、折臂、伸缩按钮,电源按钮控制遥控器开关,按下急停按钮,所有动作停止,回转按钮控制回转系统(回转支撑2带动折臂吊)旋转,变幅按钮控制大臂4旋转,折臂按钮控制折臂9旋转,伸缩按钮控制折臂伸缩臂902伸缩,当操作遥控器时,电控箱控制器通过收发器接收到信号并处理后,输出给主阀,主阀控制液压系统,液压系统来执行相应的动作,包括:大臂变幅角度、折臂变幅角度、伸缩臂伸缩长度、回转角度,所述电控箱控制器接收到遥控器回转、变幅、折臂、伸缩信号,根据回转、变幅、折臂、伸缩按钮手柄推动的幅度来输出给主阀,得到相应比例的主阀开口,控制运动速度,所述电控箱控制器接收到遥控器的信号时,会有延迟缓慢启动,避免猛推猛拉操作给设备带来的损坏,当即将到达运动极限位置时,电控箱控制器接收到传感器的信号,将缓慢停止动作,减少到达极限位置给设备造成的损坏;
[0069]
所述报警装置包括三色灯和喇叭;所述传感器包括:折臂角度传感器、大臂角度传感器、大臂变幅油缸杆腔压力传感器、回转角度传感器、系统压力传感器,所述折臂角度传感器安装于折臂9尾端的铰接轴上,所述大臂角度传感器安装于大臂4尾端的铰接轴上,所述大臂变幅油缸杆腔压力传感器设置于大臂变幅油缸5杆腔内,所述回转角度传感器安装在回转控制装置201内,所述系统压力传感器安装在主阀出口,所述传感器信号发送给电控箱控制器;电控箱控制器处理传感器信号,所述电控箱控制器接收来自大臂变幅油缸杆腔压力传感器传递来的信号,当压力超过19mpa时,将信号输出给三色灯及喇叭,发出即将超载预警信号,当压力超过21mpa时,将信号输出给三色灯及喇叭,发出超载报警;所述电控箱控制器接收来自系统压力传感器传递来的信号,当压力超过21mpa时,将信号输出给三色灯及喇叭,发出报警,说明设定系统压力偏高或主阀异常等故障;所述电控箱控制器接收来自遥控器回转信号,将信号输出给主阀,执行动作,屏蔽遥控器给出的其他动作,当操作回转时,操作其他动作无效,这时接收到系统压力传感器传递来的信号,当压力超过8mpa时,将信号输出给三色灯及喇叭,发出预警,当压力超过10mpa时,将信号输出给三色灯及喇叭,发出报警,说明回转支撑异常或故障,当压力超过16mpa时,将信号输出给三色灯及喇叭,发出报警,此时回转信号不输出给主阀,不执行动作;
[0070]
所述遥控器显示屏通过收发器接收并显示来自电控箱控制器的信号,显示屏上显示包括:传感器传回的信号:折臂角度、大臂角度、大臂变幅油缸杆腔压力、回转角度、系统压力,以及电控箱控制器发出的控制信号对应的各个动作(回转顺时针、逆时针旋转;大臂(变幅) 升、降;折臂起、落;伸缩臂伸、缩),通过显示屏可以时时看到折臂吊的状态并作出相应的调整;
[0071]
该控制系统的优点包括:采用遥控器控制操作,方便装载垃圾桶时,操作人员根据工作环境进行操作;当操作时,根据传感器数据来发出预警、报警信号,提醒工作人员安全操作;当操作回转时,操作其他动作无效,避免折臂吊整体旋转时,发生撞击等事故;在超载或有故障时,将信号传递给三色灯和喇叭,发出预警、报警,同时发射给遥控器,并在遥控器显示屏上显示,信息及时提示给操作人员,便于操作人员迅速做出应对;通过显示屏可以时时看到折臂吊的状态并作出相应的调整;电控箱控制器发送的操作命令采用延迟缓慢启动,避免猛推猛拉操作给设备带来的损坏;当即将到达运动极限位置时,电控箱控制器接收到传感器的信号,将缓慢停止动作,减少到达极限位置给设备造成的损坏。
[0072]
以上实施例仅用于说明本发明的较佳实施方式,而不是用于限定本发明,对于本领域的普通技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1