一种行走式多功能机械臂的制作方法
[0001]
本实用新型一种行走式多功能机械臂,属于行走式多功能机械臂技术领域。
背景技术:
[0002]
在机械加工和装配生产领域中,重量为15kg-50kg的工件在加工或装配工位进行装卸或搬运时,一般都需要借助天车起重机辅助完成其加工或装配的工作。在利用天车起重机作业时,主要依赖于操作人员熟练地操作技能使得工件加工或装配工作顺利进行,但是由于天车起重机的结构复杂,体型庞大,在操作过程中往往会发生在工件起吊过程中由于操作不当使得工件摆动从而导致工件磕碰到机床;当有多个工件需要同时进行加工或装配时,由于天车起重机的操作无法同时完成多个工件的装卸或搬运,只能通过天车起重机一个一个的搬运或装卸,导致生产等待时间较长,工作效率较低;同时由于天车起重机不易操作,在作业工程中,往往需要天车起重机操作人员和设备操作人员密切配合才能完成工件的加工或装配,造成了人员的浪费。
技术实现要素:
[0003]
本实用新型为了克服现有技术中存在的不足,所要解决的技术问题为:提供一种行走式多功能机械臂硬件结构的改进。
[0004]
为了解决上述技术问题,本实用新型采用的技术方案为:一种行走式多功能机械臂,包括车底座,所述车底座的一端设置有驱动轮,所述车底座的另一端设置有行走轮,所述驱动轮通过设置在车轮轴上的行走电机控制驱动,所述驱动轮的滚轮支架上向外延伸设置有把手;
[0005]
所述车底座上设置有升降装置、回转装置和机械臂装置,所述升降装置包括升降电动推杆,所述升降电动推杆的固定端通过螺栓与车底座连接固定,所述升降电动推杆的活动端通过螺栓与回转装置底盘连接固定;
[0006]
所述回转装置包括回转支撑驱动轮和电旋转连接器,所述回转支撑驱动轮固定在回转装置底盘上,所述回转支撑驱动轮的转轮与电旋转连接器的转轴传动连接,所述回转支撑驱动轮通过设置在驱动轮底部的回转电机控制驱动;
[0007]
所述机械臂装置包括立柱、支柱、横梁,所述横梁的延伸端设置有伸缩电动推杆,所述立柱的一端通过螺栓垂直固定在回转装置上,所述立柱的另一端与横梁连接固定,所述支柱的一端通过螺栓固定在回转装置上,所述支柱的另一端与伸缩电动推杆连接固定,所述伸缩电动推杆通过伸缩电机控制驱动;
[0008]
所述伸缩电动推杆的延伸端设置有伸缩臂;
[0009]
所述伸缩臂的尾端设置有机械爪电动推杆和机械爪支架,所述机械爪电动推杆设置在机械爪支架内侧,所述机械爪电动推杆的一端通过螺栓与伸缩臂连接固定,所述机械爪电动推杆的另一端与机械爪铰接,所述机械爪电动推杆通过机械爪电机控制驱动;
[0010]
所述伸缩臂的延伸端还通过螺栓固定有卷扬,所述卷扬上缠绕有钢绳,所述钢绳
的一端与卷扬吊钩相连,所述卷扬通过卷扬电机控制驱动;
[0011]
所述车底座上还固定设置有控制柜和电缆卷线器。
[0012]
所述驱动轮的数量为一个,具体设置在车底座一端的中部,所述驱动轮具体为带有万向转动机构的驱动轮;
[0013]
所述行走轮的数量为两个,具体设置在车底座另一端的两侧。
[0014]
所述升降电动推杆的数量为三个,具体安装在驱动轮和行走轮的上部;
[0015]
所述升降电动推杆通过相应的升降电机控制驱动。
[0016]
所述控制柜上设置有外置手持操作盒,所述外置手持操作盒上设置有启动按钮sa1,急停按钮sb1,升降动作开关sa2,行走动作开关sa3,回转动作开关sa4,机械爪动作开关sa5,伸缩动作开关sa6,卷扬动作开关sa7;
[0017]
所述启动按钮sa1与急停按钮sb1相连形成启动开关,所述启动开关的进线端接入交流电电源,所述启动开关的出线端串接保护开关组后与交流接触器线圈km1的进线端相连,所述交流接触器线圈km1的联动触点为常开触点km1.1,所述启动开关的进线端与常开触点km1.1的进线端相连;
[0018]
所述常开触点km1.1的出线端依次并接升降电机控制回路、行走电机控制回路、回转电机控制回路、机械爪电机控制回路、伸缩电机控制回路的进线端后与卷扬电机控制回路的进线端相连。
[0019]
所述升降电机控制回路、行走电机控制回路、回转电机控制回路、机械爪电机控制回路、伸缩电机控制回路、卷扬电机控制回路中设置有继电器线圈km2-km13;
[0020]
所述升降电机控制回路的进线端与升降动作开关sa2的输入端相连,所述升降动作开关sa2的一个输出端串接继电器线圈km2后接入三相电源的n相,所述升降动作开关sa2的另一个输出端串接继电器线圈km3后接入三相电源的n相;
[0021]
所述行走电机控制回路的进线端与行走动作开关sa3的输入端相连,所述行走动作开关sa3的一个输出端串接继电器线圈km4后接入三相电源的n相,所述行走动作开关sa3的另一个输出端串接继电器线圈km5后接入三相电源的n相;
[0022]
所述回转电机控制回路的进线端与回转动作开关sa4的输入端相连,所述回转动作开关sa4的一个输出端串接继电器线圈km6后接入三相电源的n相,所述回转动作开关sa4的另一个输出端串接继电器线圈km7后接入三相电源的n相;
[0023]
所述机械爪电机控制回路的进线端与机械爪动作开关sa5的输入端相连,所述机械爪动作开关sa5的一个输出端串接继电器线圈km8后接入三相电源的n相,所述机械爪动作开关sa5的另一个输出端串接继电器线圈km9后接入三相电源的n相;
[0024]
所述伸缩电机控制回路的进线端与伸缩动作开关sa6的输入端相连,所述伸缩动作开关sa6的一个输出端串接继电器线圈km10后接入三相电源的n相,所述伸缩动作开关sa6的另一个输出端串接继电器线圈km11后接入三相电源的n相;
[0025]
所述卷扬电机控制回路的进线端与卷扬动作开关sa7的输入端相连,所述卷扬动作开关sa7的一个输出端串接继电器线圈km12后接入三相电源的n相,所述卷扬动作开关sa7的另一个输出端串接继电器线圈km13后接入三相电源的n相。
[0026]
所述继电器线圈km2的常开触点为km2.1;
[0027]
所述继电器线圈km3的常开触点为km3.1;
[0028]
所述继电器线圈km4的常开触点为km4.1;
[0029]
所述继电器线圈km5的常开触点为km5.1;
[0030]
所述继电器线圈km6的常开触点为km6.1;
[0031]
所述继电器线圈km7的常开触点为km7.1;
[0032]
所述继电器线圈km8的常开触点为km8.1;
[0033]
所述继电器线圈km9的常开触点为km9.1;
[0034]
所述继电器线圈km10的常开触点为km10.1;
[0035]
所述继电器线圈km11的常开触点为km11.1;
[0036]
所述继电器线圈km12的常开触点为km12.1;
[0037]
所述继电器线圈km13的常开触点为km13.1;
[0038]
所述控制柜中还设置有电机驱动及调速电路,所述电机驱动及调速电路的电路结构为:所述升降电机控制回路的电机控制端接入三相电源,所述常开触点km2.1设置在升降电机的正转控制回路上,所述常开触点km3.1设置在升降电机的反转控制回路上;
[0039]
所述行走电机控制回路的电机控制端接入三相电源,所述常开触点km4.1设置在行走电机的正转控制回路上,所述常开触点km5.1设置在行走电机的反转控制回路上;
[0040]
所述回转电机控制回路的电机控制端接入三相电源,所述常开触点km6.1设置在回转电机的正转控制回路上,所述常开触点km7.1设置在回转电机的反转控制回路上;
[0041]
所述机械爪电机控制回路的电机控制端接入三相电源,所述常开触点km8.1设置在机械爪电机的正转控制回路上,所述常开触点km9.1设置在机械爪电机的反转控制回路上;
[0042]
所述伸缩电机控制回路的电机控制端接入三相电源,所述常开触点km10.1设置在伸缩电机的正转控制回路上,所述常开触点km11.1设置在伸缩电机的反转控制回路上;
[0043]
所述伸缩电机的信号输出端与第一转差离合器相连,所述第一转差离合器的输出端与第一测速发电机相连;
[0044]
所述卷扬电机控制回路的电机控制端接入三相电源,所述常开触点km12.1设置在卷扬电机的正转控制回路上,所述常开触点km13.1设置在卷扬电机的反转控制回路上;
[0045]
所述卷扬电机的信号输出端与第二转差离合器相连,所述第二转差离合器的输出端与第二测速发电机相连。
[0046]
所述交流电电源的输出端上还设置有保护开关ql1和相序保护器ka,所述保护开关组包括保护开关ql2-ql9;
[0047]
所述升降电机的进线端上设置有保护开关ql2-ql4;
[0048]
所述行走电机的进线端上设置有保护开关ql5;
[0049]
所述回转电机的进线端上设置有保护开关ql6;
[0050]
所述机械爪电机的进线端上设置有保护开关 ql7;
[0051]
所述伸缩电机的进线端上设置有保护开关ql8;
[0052]
所述卷扬电机的进线端上设置有保护开关ql9。
[0053]
本实用新型相对于现有技术具备的有益效果为:本实用新型提供一种可行走的多功能机械臂,通过设置的把手和驱动轮可实现对机械臂的行进方向的控制,同时可以通过行走完成工件的搬运,操作简单且容易控制,在作业过程中也避免了由于操作问题造成的
机床磕碰的问题;本实用新型的机械臂通过设置的升降电机、回转电机、伸缩电机、机械爪电机、卷扬电机及卷扬吊钩实现了对机械臂的多方位的控制,可以实现机械臂的升降、伸缩、回转、抓取和吊装货物的功能,本实用新型同时设置有机械爪和卷扬吊钩,可以实现对不同工件的抓取、升降同时搬运的功能,解决了天车起重机在15kg-50kg的工件进行加工作业或装配、搬运作业中辅助时间长、人员浪费的问题,不仅提高了生产效率,降低了辅助时间,而且还提高了作业中的安全系数。
附图说明
[0054]
下面结合附图对本实用新型进行进一步说明:
[0055]
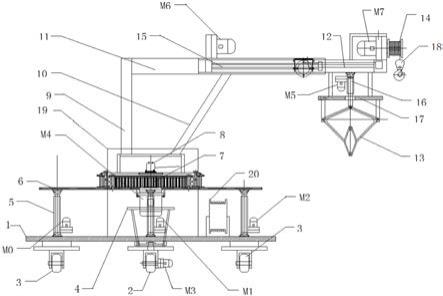
图1为本实用新型的结构示意图;
[0056]
图2为图1的侧视图;
[0057]
图3为本实用新型电源控制电路的结构示意图;
[0058]
图4为本实用新型的电机驱动及调速电路结构示意图;
[0059]
图5为本实用新型的电机驱动及调速电路结构示意图;
[0060]
图中:1为底盘车、2为驱动轮、3为行走轮、4为把手、5为升降电动推杆、6为回转装置底盘、7为回转支撑驱动轮、8为电旋转连接器、9为立柱、10为支柱、11为横梁、12为伸缩臂、13为机械爪、14为卷扬、15为伸缩电动推杆、16为机械爪电动推杆、17为机械爪支架、18为卷扬吊钩、19为控制柜、20为电缆卷线器;
[0061]
m0-m2为升降电机、m3为行走电机、m4为回转电机、m5为机械爪电机、m6为伸缩电机、m7为卷扬电机、m8为第一测速发电机、m9为第二测速发电机。
具体实施方式
[0062]
如图1至图5所示,本实用新型一种行走式多功能机械臂,包括车底座1,所述车底座1的一端设置有驱动轮2,所述车底座1的另一端设置有行走轮3,所述驱动轮2通过设置在车轮轴上的行走电机控制驱动,所述驱动轮2的滚轮支架上向外延伸设置有把手4;
[0063]
所述车底座1上设置有升降装置、回转装置和机械臂装置,所述升降装置包括升降电动推杆5,所述升降电动推杆5的固定端通过螺栓与车底座1连接固定,所述升降电动推杆5的活动端通过螺栓与回转装置底盘6连接固定;
[0064]
所述回转装置包括回转支撑驱动轮7和电旋转连接器8,所述回转支撑驱动轮7固定在回转装置底盘6上,所述回转支撑驱动轮7的转轮与电旋转连接器8的转轴传动连接,所述回转支撑驱动轮7通过设置在驱动轮底部的回转电机控制驱动;
[0065]
所述机械臂装置包括立柱9、支柱10、横梁11,所述横梁11的延伸端设置有伸缩电动推杆15,所述立柱9的一端通过螺栓垂直固定在回转装置上,所述立柱9的另一端与横梁11连接固定,所述支柱10的一端通过螺栓固定在回转装置上,所述支柱10的另一端与伸缩电动推杆15连接固定,所述伸缩电动推杆15通过伸缩电机控制驱动;
[0066]
所述伸缩电动推杆15的延伸端设置有伸缩臂12;
[0067]
所述伸缩臂12的尾端设置有机械爪电动推杆16和机械爪支架17,所述机械爪电动推杆16设置在机械爪支架17内侧,所述机械爪电动推杆16的一端通过螺栓与伸缩臂12连接固定,所述机械爪电动推杆16的另一端与机械爪13铰接,所述机械爪电动推杆16通过机械
爪电机控制驱动;
[0068]
所述伸缩臂12的延伸端还通过螺栓固定有卷扬14,所述卷扬14上缠绕有钢绳,所述钢绳的一端与卷扬吊钩18相连,所述卷扬14通过卷扬电机控制驱动;
[0069]
所述车底座1上还固定设置有控制柜19和电缆卷线器20。
[0070]
所述驱动轮2的数量为一个,具体设置在车底座1一端的中部,所述驱动轮2具体为带有万向转动机构的驱动轮;
[0071]
所述行走轮3的数量为两个,具体设置在车底座1另一端的两侧。
[0072]
所述升降电动推杆5的数量为三个,具体安装在驱动轮2和行走轮3的上部;
[0073]
所述升降电动推杆5通过相应的升降电机控制驱动。
[0074]
所述控制柜19上设置有外置手持操作盒,所述外置手持操作盒上设置有启动按钮sa1,急停按钮sb1,升降动作开关sa2,行走动作开关sa3,回转动作开关sa4,机械爪动作开关sa5,伸缩动作开关sa6,卷扬动作开关sa7;
[0075]
所述启动按钮sa1与急停按钮sb1相连形成启动开关,所述启动开关的进线端接入交流电电源,所述启动开关的出线端串接保护开关组后与交流接触器线圈km1的进线端相连,所述交流接触器线圈km1的联动触点为常开触点km1.1,所述启动开关的进线端与常开触点km1.1的进线端相连;
[0076]
所述常开触点km1.1的出线端依次并接升降电机控制回路、行走电机控制回路、回转电机控制回路、机械爪电机控制回路、伸缩电机控制回路的进线端后与卷扬电机控制回路的进线端相连。
[0077]
所述升降电机控制回路、行走电机控制回路、回转电机控制回路、机械爪电机控制回路、伸缩电机控制回路、卷扬电机控制回路中设置有继电器线圈km2-km13;
[0078]
所述升降电机控制回路的进线端与升降动作开关sa2的输入端相连,所述升降动作开关sa2的一个输出端串接继电器线圈km2后接入三相电源的n相,所述升降动作开关sa2的另一个输出端串接继电器线圈km3后接入三相电源的n相;
[0079]
所述行走电机控制回路的进线端与行走动作开关sa3的输入端相连,所述行走动作开关sa3的一个输出端串接继电器线圈km4后接入三相电源的n相,所述行走动作开关sa3的另一个输出端串接继电器线圈km5后接入三相电源的n相;
[0080]
所述回转电机控制回路的进线端与回转动作开关sa4的输入端相连,所述回转动作开关sa4的一个输出端串接继电器线圈km6后接入三相电源的n相,所述回转动作开关sa4的另一个输出端串接继电器线圈km7后接入三相电源的n相;
[0081]
所述机械爪电机控制回路的进线端与机械爪动作开关sa5的输入端相连,所述机械爪动作开关sa5的一个输出端串接继电器线圈km8后接入三相电源的n相,所述机械爪动作开关sa5的另一个输出端串接继电器线圈km9后接入三相电源的n相;
[0082]
所述伸缩电机控制回路的进线端与伸缩动作开关sa6的输入端相连,所述伸缩动作开关sa6的一个输出端串接继电器线圈km10后接入三相电源的n相,所述伸缩动作开关sa6的另一个输出端串接继电器线圈km11后接入三相电源的n相;
[0083]
所述卷扬电机控制回路的进线端与卷扬动作开关sa7的输入端相连,所述卷扬动作开关sa7的一个输出端串接继电器线圈km12后接入三相电源的n相,所述卷扬动作开关sa7的另一个输出端串接继电器线圈km13后接入三相电源的n相。
[0084]
所述继电器线圈km2的常开触点为km2.1;
[0085]
所述继电器线圈km3的常开触点为km3.1;
[0086]
所述继电器线圈km4的常开触点为km4.1;
[0087]
所述继电器线圈km5的常开触点为km5.1;
[0088]
所述继电器线圈km6的常开触点为km6.1;
[0089]
所述继电器线圈km7的常开触点为km7.1;
[0090]
所述继电器线圈km8的常开触点为km8.1;
[0091]
所述继电器线圈km9的常开触点为km9.1;
[0092]
所述继电器线圈km10的常开触点为km10.1;
[0093]
所述继电器线圈km11的常开触点为km11.1;
[0094]
所述继电器线圈km12的常开触点为km12.1;
[0095]
所述继电器线圈km13的常开触点为km13.1;
[0096]
所述控制柜19中还设置有电机驱动及调速电路,所述电机驱动及调速电路的电路结构为:所述升降电机控制回路的电机控制端接入三相电源,所述常开触点km2.1设置在升降电机的正转控制回路上,所述常开触点km3.1设置在升降电机的反转控制回路上;
[0097]
所述行走电机控制回路的电机控制端接入三相电源,所述常开触点km4.1设置在行走电机的正转控制回路上,所述常开触点km5.1设置在行走电机的反转控制回路上;
[0098]
所述回转电机控制回路的电机控制端接入三相电源,所述常开触点km6.1设置在回转电机的正转控制回路上,所述常开触点km7.1设置在回转电机的反转控制回路上;
[0099]
所述机械爪电机控制回路的电机控制端接入三相电源,所述常开触点km8.1设置在机械爪电机的正转控制回路上,所述常开触点km9.1设置在机械爪电机的反转控制回路上;
[0100]
所述伸缩电机控制回路的电机控制端接入三相电源,所述常开触点km10.1设置在伸缩电机的正转控制回路上,所述常开触点km11.1设置在伸缩电机的反转控制回路上;
[0101]
所述伸缩电机的信号输出端与第一转差离合器相连,所述第一转差离合器的输出端与第一测速发电机相连;
[0102]
所述卷扬电机控制回路的电机控制端接入三相电源,所述常开触点km12.1设置在卷扬电机的正转控制回路上,所述常开触点km13.1设置在卷扬电机的反转控制回路上;
[0103]
所述卷扬电机的信号输出端与第二转差离合器相连,所述第二转差离合器的输出端与第二测速发电机相连。
[0104]
所述交流电电源的输出端上还设置有保护开关ql1和相序保护器ka,所述保护开关组包括保护开关ql2-ql9;
[0105]
所述升降电机的进线端上设置有保护开关ql2-ql4;
[0106]
所述行走电机的进线端上设置有保护开关ql5;
[0107]
所述回转电机的进线端上设置有保护开关ql6;
[0108]
所述机械爪电机的进线端上设置有保护开关 ql7;
[0109]
所述伸缩电机的进线端上设置有保护开关ql8;
[0110]
所述卷扬电机的进线端上设置有保护开关ql9。
[0111]
本实用新型的所有机构均安装在底盘车1上,底盘车1带有三个车轮,其中一个车
轮为驱动轮2,通过行走电机m3驱动,且该驱动轮2为带有万向转动机构的驱动轮,其他两个车轮为行走轮3,在驱动轮2一侧还设置有把手4,工作人员可以通过操作把手4控制整个车的行走方向;机械臂装置的升降通过安装在底盘车1和回转装置底盘6间的升降电动推杆5由升降电机驱动来实现;机械臂装置还可以通过回转支撑驱动轮7实现水平回转,回转支撑驱动轮7通过回转电机m4进行驱动;机械臂装置主要包括立柱9、支柱10、横梁11、伸缩臂12、机械爪13、卷扬14和卷扬吊钩18,伸缩臂12通过伸缩电机m6驱动伸缩电动推杆15实现机械臂的伸缩,伸缩电动推杆15可以根据工件情况进行无级调速控制,卷扬14通过卷扬电机m7进行驱动,卷扬作业可以通过控制卷扬电机m7的速度控制工件的起升、下降的速度,机械爪13通过机械爪电机m5驱动机械爪电动推杆16实现机械爪的抓紧和松开动作。
[0112]
本实用新型的机械臂还在底盘车1上设置有控制柜19,在控制柜19上外置了一个手持操作盒,方便操作,整个机械臂的线缆均可以通过电缆卷线器20进行线缆的收放,机械臂上安装的部分电气设备可以通过安装在回转支撑驱动轮7间的电旋转连接器8与控制柜19连接。
[0113]
本实用新型在使用时先通过设置在控制柜19上的启动按钮sa1来启动整个系统的电源,启动按钮sa1为系统的启动电源,点击启动按钮sa1,交流接触器线圈km1得电,常开触点km1.1闭合,系统上电,本实用新型的控制电路中还设置有相序保护器ka,用来负责系统电源缺相和相序的保护,确保各个电机的供电安全和机械臂的转向正确,另外本实用新型的控制电路还设置有急停按钮sb1,当系统发生意外时,可以拍下急停按钮sb1,切断系统的电源,从而保证整个系统的安全,避免发生电路事故。
[0114]
当系统电源启动后,通过作业现场的环境适当调整机械臂小车整体的高度,通过升降动作开关sa2控制升降电机m0、升降电机m1、升降电机m2来驱动升降电动推杆5以实现对机械臂小车整体的升降控制,从而控制平台升降作业;具体为将升降动作开关sa2的拨片拨至使继电器线圈km2得电,此时常开触点km2.1闭合,升降电机m0、升降电机m1、升降电机m2同时正转驱动升降电动推杆5上升使得机械臂高度升高,将升降动作开关sa2的拨片拨至使继电器线圈km3得电,此时常开触点km2.1失电断开,常开触点km3.1闭合,升降电机m0、升降电机m1、升降电机m2同时反转驱动升降电动推杆5下降使得机械臂高度降低,当升降动作开关sa2的拨片拨至中间时,此时继电器线圈km2、km3均失电,常开触点km2.1、km3.1均打开,升降电机m0、升降电机m1、升降电机m2同时停止转动,机械臂处于合适的作业高度。
[0115]
在调整好机械臂小车整体的高度后,通过行走动作开关sa3控制行走电机m3实现对驱动轮2的行走启停和转向的控制,从而控制小车实现前进、后退、倒车和停车的功能,并且通过把手4与驱动轮2的配合使用从而实现对小车行进方向的控制;具体为将行走动作开关sa3的拨片拨至使继电器线圈km4得电,此时常开触点km4.1闭合,行走电机m3正转控制驱动轮2前进,将行走动作开关sa3的拨片拨至使继电器线圈km5得电,此时常开触点km4.1失电断开,常开触点km5.1闭合,行走电机m3反转控制驱动轮2后退,将行走动作开关sa3的拨片拨至中间,此时继电器线圈km4、km5均失电,常开触点km4.1、km5.1均打开,行走电机m3停止转动,机械臂小车停止在作业点。
[0116]
当机械臂小车整体的高度及行进方向都确定后,在作业时通过回转动作开关sa4控制回转电机m4的启停及转向,从而实现对机械臂作业时的回转控制;具体为将回转动作开关sa4的拨片拨至使继电器线圈km6得电,此时常开触点km6.1闭合,回转电机m4正转控制
机械臂正向作业,当回转动作开关sa4的拨片拨至使继电器线圈km7得电,此时常开触点km6.1失电断开,常开触点km7.1闭合,回转电机m4反转控制机械臂反向作业,当回转动作开关sa4的拨片拨至中间,此时继电器线圈km6、km7均失电,常开触点km6.1、km7.1均打开,回转电机m4停止转动,机械臂处于前一个回转状态。
[0117]
在机械臂作业时,通过机械爪动作开关sa5控制机械爪电机m5的启停及转向来驱动机械爪电动推杆16运动,从而实现对机械爪13的抓取、松开作业的控制;具体为将机械爪动作开关sa5的拨片拨至使继电器线圈km8得电,此时常开触点km8.1闭合,机械爪电机m5正转驱动机械爪电动推杆16向上运动使机械爪呈抓取状态,当机械爪动作开关sa5的拨片拨至使继电器线圈km9得电,此时常开触点km8.1失电断开,常开触点km9.1闭合,机械爪电机m3反转驱动机械爪电动推杆16向下运动使机械爪呈松开状态,当机械爪动作开关sa5的拨片拨至中间,此时继电器线圈km8、km9均失电,常开触点km8.1、km9.1均打开,机械爪电机m3停止转动,此时机械爪停止抓取或松开作业。
[0118]
在机械臂作业过程中还需要实现对机械臂的伸缩控制,本实用新型通过设置的伸缩动作开关sa6控制伸缩电机m6的启停及转向从而控制伸缩电动推杆15运动,实现了机械臂的伸缩作业,在实际作业中往往需要根据现场的情况来控制电机的转速,通过转差离合器及测速发电机m8的配合使用实时控制伸缩电机m6的电机转速,从而达到控制伸缩速度的目的;具体为将伸缩动作开关sa6的拨片拨至使继电器线圈km10得电,此时常开触点km10.1闭合,伸缩电机m6正转控制伸缩电动推杆15驱动机械臂伸展,同时在伸展过程中通过转差离合器及测速发电机m8控制伸缩电机m6的转速,将伸缩动作开关sa6的拨片拨至使继电器线圈km11得电,此时常开触点km10.1失电断开,常开触点km11.1闭合,伸缩电机m6反转控制伸缩电动推杆15驱动机械臂缩回,同时在缩回过程中通过转差离合器及测速发电机m8控制伸缩电机m6的转速,将伸缩动作开关sa6的拨片拨至中间,此时继电器线圈km10、km11均失电,常开触点km10.1、km11.1均打开,伸缩电机m6停止转动,机械臂处于适合作业的伸缩范围内。
[0119]
同时在机械臂作业中也会出现需要同时运输多件工件的情况,本实用新型通过卷扬动作开关sa7实现对卷扬电机m7的启停及转向控制,从而实现对卷扬吊钩18升降作业的控制,本实用新型可以通过机械爪13和卷扬吊钩18同时实现多个工件的作业,在实际作业现场还可以通过转差离合器及测速发电机m9来实现对卷扬电机m7电机转速的控制从而实现对卷扬作业中升降速度的控制;具体为将卷扬动作开关sa7的拨片拨至使继电器线圈km12得电,此时常开触点km12.1闭合,卷扬电机m7正转控制卷扬吊钩18起升,同时在卷扬吊钩18升起过程中通过转差离合器及测速发电机m9控制卷扬电机m7的转速,将卷扬动作开关sa7的拨片拨至使继电器线圈km13得电,此时常开触点km12.1失电断开,常开触点km13闭合,卷扬电机m7反转控制卷扬吊钩18降落,同时在卷扬吊钩18降落过程中通过转差离合器及测速发电机m9控制卷扬电机m7的转速,从而控制卷扬吊钩18降落的速度,将卷扬动作开关sa7的拨片拨至中间,此时继电器线圈km12、km13均失电,常开触点km12.1、km13.1均打开,卷扬电机m7停止转动,完成对工件的装、卸。
[0120]
在电机驱动电路中,通过控制每个电机不同的接触器的开合,控制对应电机正反转,在电机调速电路中,可以通过电磁调速器,控制伸缩臂伸缩电机m6和卷扬电机m7的转速、转向从而实现机械臂伸缩速度可控、卷扬升降速度可控的功能。
[0121]
本实用新型中使用的驱动电机采用现有型号,具体为:
[0122]
所述升降电机m0、升降电机m1、升降电机m2、伸缩电机m5的型号为nkla22-s;
[0123]
所述行走电机m2的型号为saf107;
[0124]
所述回转电机m3的型号为kb142;
[0125]
所述机械爪电机m4的型号为ez-400ez-300;
[0126]
所述卷扬电机m7的型号为ik-2.5/30;
[0127]
所述第一测速发电机m8、第二测速发电机m9的型号为gat9.06/420。
[0128]
关于本实用新型具体结构需要说明的是,本实用新型采用的各部件模块相互之间的连接关系是确定的、可实现的,除实施例中特殊说明的以外,其特定的连接关系可以带来相应的技术效果,并基于不依赖相应软件程序执行的前提下,解决本实用新型提出的技术问题,本实用新型中出现的部件、模块、具体元器件的型号、连接方式除具体说明的以外,均属于本领域技术人员在申请日前可以获取到的已公开专利、已公开的期刊论文、或公知常识等现有技术,无需赘述,使得本案提供的技术方案是清楚、完整、可实现的,并能根据该技术手段重现或获得相应的实体产品。
[0129]
最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1