一种弹条夹爪的制作方法
[0001]
本实用新型涉及夹爪领域,具体地涉及一种弹条夹爪。
背景技术:
[0002]
在铁道部件生产中,工件加热到一定温度后进行热压成型,目前市场上没有自动完成该工序设备,现有的热压机是人工将工件一个一个的放入模具然后加热加压,而且压力值不理想,产品由人工操作,增加了工序的累计和效率缓慢,而且有非常大的安全隐患。
[0003]
专利号为201621026797.3,公开了一种具有自动卸料功能的弹条生产线,包括依次布置的上料机构、第一工序压力机、第一机器手、第二工序压力机、第二机器手、第三工序压力机和卸料机构,该卸料机构包括机架、设置在机架上的滑台电缸,以及通过滑台电缸进行水平移动的卸料组件,该卸料组件包括升降机构以及通过悬臂与升降机构连接的夹爪一,本实用新型中卸料机构与机械手联动的卸料单元,使装置可以替代机器人或者人工抓取,节省成本。
[0004]
该实用新型存在以下不足:弹条生产为高温环境,对夹爪的要求较高,需要定期更换夹爪,该夹爪结构拆卸较麻烦,夹爪的平面头部设计会使夹爪的夹持力降低。
技术实现要素:
[0005]
本实用新型为解决现有技术的问题,提供了一种快速更换的夹头,夹持力更大的夹爪机构,本实用新型包括:
[0006]
动力机构,所述动力机构包括气缸;
[0007]
传动机构,所述传动机构包括气缸接头、旋转块、夹臂支点块、夹臂,气缸接头一端与旋转块相连,另一端与气缸相连,夹臂支点块与旋转块相连,夹臂与夹臂支点块相连;
[0008]
执行机构,所述执行机构包括夹头,所述夹头与夹臂连接,通过传动机构的运动实现夹头取放弹条。
[0009]
进一步的改进,所述气缸设于气缸安装板上,所述主板与气缸安装板相连,形成内部腔体,所述气缸一侧设有保护罩,所述气管接头与气缸相连。
[0010]
进一步的改进,所述气缸安装板的一侧连接有机器人连接块。
[0011]
进一步的改进,所述夹头前端的夹持部,用于夹持弹条。
[0012]
进一步的改进,所述夹持部的夹持面自上而下,依次相连为夹持倾斜面、夹持竖面、夹持曲面。
[0013]
进一步的改进,所述夹臂包括夹臂横杆,夹臂竖杆,所述夹臂横杆为夹臂的本体,所述夹臂横杆与夹头连接的一侧设有凹形槽体,所述夹臂横杆远离夹头的另一侧与旋转块相连,所述夹臂竖杆垂直于夹臂横杆连接。
[0014]
进一步的改进,所述夹臂支点块呈f形结构,所述夹臂支点块包括横块一,横块二,竖块,所述横块一与竖块的端部相连,横块二靠近横块一的一侧与竖块相连。
[0015]
与现有技术相比,本实用新型提供的弹条夹爪,结构设计合理,快速更换的夹头,
夹持力更大的夹爪机构使夹爪更稳定,减少人工的劳动强度,为后面工序提高产品质量和工作效率。
附图说明
[0016]
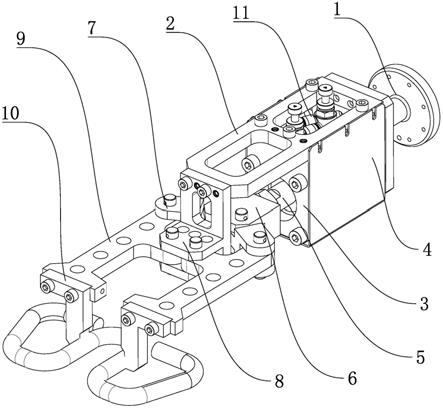
图1为本实用新型的结构示意图
[0017]
图2为本实用新型中夹头的结构示意图
[0018]
图3为本实用新型中夹臂的结构示意图
[0019]
图4为本实用新型中夹臂支点块的结构示意图
[0020]
图5为本实用新型中旋转块的结构示意图
[0021]
图6为本实用新型中气缸接头的结构示意图
[0022]
图中,1-机器人连接块,2-主板,3-气缸安装板,4-保护罩,5-气缸
[0023]
6-气缸接头,7-旋转块,8-夹臂支点块,9-夹臂,10-夹头,11-气管接头, 81-横块一,82-横块二,83-竖块,91-凹形槽体,92-臂横杆,93-夹臂竖杆,101-夹持部,102-夹持上端,103-夹持面,104-夹持倾斜面,105-夹持竖面, 106-夹持曲面。
具体实施方式
[0024]
下面结合实施例及附图1~6,对本实用新型的技术方案作进一步的阐述。
[0025]
实施例1:一种弹条夹爪,包括:
[0026]
动力机构,所述动力机构包括气缸5,气缸可在恶劣条件下可靠地工作,且操作简单,基本可实现免维护,气缸擅长作往复直线运动,仅仅调节安装在气缸两侧的单向节流阀就可简单地实现稳定的速度控制;
[0027]
传动机构,所述传动机构包括气缸接头6、旋转块7、夹臂支点块8、夹臂 9,气缸接头6一端与旋转块7相连,另一端与气缸5相连,夹臂支点块8与旋转块7相连,夹臂9与夹臂支点块8相连,通过简单的机械连杆组合构成弹条夹爪的传动机构,就能够实现执行机构抓取动作所要求的运动轨迹,并且后期维护方便;
[0028]
执行机构,所述执行机构包括夹头10,所述夹头10与夹臂9连接,通过传动机构的运动实现夹头10取放弹条。
[0029]
实施例2:所述气缸5设置于气缸安装板3上,所述主板2与气缸安装板3 相连,形成内部腔体,所述气缸5一侧设有保护罩4,所述气管接头11与气缸 5相连,主板2上部中空,便于气管接头11与外部元件相连,内部腔体内放置缸5与气管接头11。
[0030]
实施例3:所述气缸安装板3的一侧连接有机器人连接块1,夹爪可应用于弹条搬运机器人上,通过机器人连接块1可实现弹条在更大方向的旋转与移动。
[0031]
实施例4:所述夹头10前端的夹持部101,用于夹持弹条。
[0032]
实施例5:所述夹持部101的夹持面103自上而下,依次相连为夹持倾斜面 104、夹持竖面105、夹持曲面106,夹持部101不同的夹持面103的设置,可以增加夹持力,使夹持不同形状的工件可紧密夹持。
[0033]
实施例6:所述夹臂9包括夹臂横杆92,夹臂竖杆93,所述夹臂横杆92为夹臂9的本体,所述夹臂横杆92与夹头10连接的一侧设有凹形槽体91,所述夹臂横杆92远离夹头10的另一侧与旋转块7相连,所述夹臂竖杆93垂直于夹臂横杆92连接,夹头10卡入夹臂横杆92上
的凹形槽体91,再通过螺栓可拆卸连接,保证夹头10与夹臂连接的稳定性,当夹头10长时间夹取高温弹条导致夹取效果差时也可快速更换夹头10,增加了工作效率,夹臂横杆92远离夹头 10的一侧通过圆杆与旋转块7转动连接。
[0034]
实施例7:所述夹臂支点块8呈f形结构,所述夹臂支点块8包括横块一 81,横块二82,竖块83,所述横块一81与竖块83的端部相连,横块二82靠近横块一81的一侧与竖块83相连,夹臂9上的夹臂竖杆93安装在横块一81 与横块二82之间,再通过圆杆转动连接。
[0035]
实施例8:所述夹臂支点块8的竖块83的一端与主板2螺栓固定,气缸接头 6一端与旋转块7通过圆杆转动连接,气缸接头6一端的另一端与气缸5连接;夹臂支点块8的一端与主板5固定,所以传动机构、执行机构与气缸5在同一平面上做往复运动,当气缸5朝着远离夹臂支点块8的方向运动,夹臂9在传动机构的运动下会向外转动,进一步使得夹头10向外展开,到达抓取弹条的指定区域后,气缸5朝着靠近夹臂支点块8的方向运动,夹爪10向内收拢,抓取并紧固弹条,完成弹条的抓取。
[0036]
以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1