具有自动纠偏和自动上下料功能全自动双工位贴辅料机的制作方法
1.本实用新型涉及手机壳手工拉线贴合辅料技术领域,特指一种具有自动纠偏和自动上下料功能全自动双工位贴辅料机。
背景技术:
2.手机壳上面的辅料目前为手工贴合或者全自动组装生产线贴合。手工贴合效率低,品质差;而全自动组装生产线贴合又成本高且切换项目复杂。
3.因此,有必要对现有技术进行改进。
技术实现要素:
4.针对以上问题,本实用新型提供了一种具有自动纠偏和自动上下料功能全自动双工位贴辅料机,有效解决现有技术中的缺陷。
5.为了实现上述目的,本实用新型应用的技术方案如下:
6.具有自动纠偏和自动上下料功能全自动双工位贴辅料机,包括贴辅料机贴辅料机上设有用于将产品导向的导向机构、以及用于将产品上料的上料机构、以及用于将产品进行旋转的旋转机构、以及用于将产品进行吸附的吸料机构、以及用于将产品下料的下料机构、以及用于纠偏的纠偏机构以及控制机构。
7.根据以上方案,所述导向机构包括导向轨道以及设于导向轨道上的来料感应器,来料感应器电连接于控制机构。
8.根据以上方案,所述上料机构包括上料机械手以及与上料机械手对应设置的上料机械手滑轨,上料机械手通过驱动组件可在上料机械手滑轨可来回滑动。
9.根据以上方案,所述旋转机构包括分度盘以及设于分度盘上的多个定位底模,分度盘上对应设有上料位、贴合位、下料位,上料位与上料机构对应设置,贴合位与吸料机构对应设置,下料位与下料机构对应设置,分度盘通过控制机构控制旋转。
10.根据以上方案,所述吸料机构包括吸料治具以及吸料治具驱动装置。
11.根据以上方案,所述下料机构包括下料机械手以及与下料机械手对应设置的下料机械手滑轨,下料机械手通过驱动组件可在下料机械手滑轨可来回滑动。
12.根据以上方案,所述纠偏机构包括ccd拍照上摄像头与ccd拍照下摄像头, ccd拍照上摄像头与ccd拍照下摄像头分别与吸料机构对应设置,纠偏机构电连接于控制机构。
13.根据以上方案,所述控制机构包括plc控制系统。
14.根据以上方案,所述贴辅料机的底部上设有用于滚动的万向滚轮以及用于定位支撑的定位底撑。
15.本实用新型有益效果:
16.本实用新型采用这样的结构设置,贴辅料机单台独立运行,使用成本低,单台机双工位工作,工作效率高,可以达到产能1200pcs/h以上,另外配备ccd 拍照纠偏系统,可以对辅料进行拍照纠偏,此贴辅料机自动上下料,自动贴合,全程不需要人员操作。
附图说明
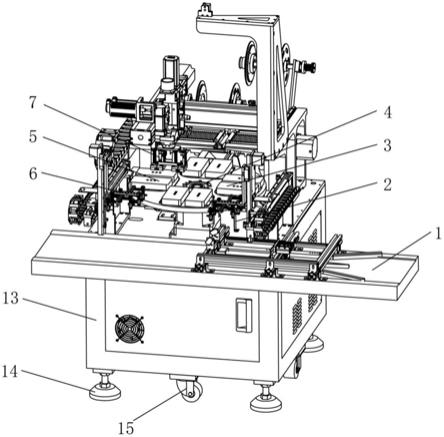
17.图1是本实用新型整体结构立体图;
18.图2是本实用新型整体结构俯视图。
19.1.导向机构;2.上料机构;3.上料位;4.贴合位;5.下料位;6.下料机构;7.吸头机构;8.旋转机构;9.定位底模;11.上料机械手滑轨;12.下料机械手滑轨;13. 贴辅料机;14.定位底撑;15.万向滚轮。
具体实施方式
20.下面结合附图与实施例对本实用新型的技术方案进行说明。
21.如图1和图2所示,本实用新型所述具有自动纠偏和自动上下料功能全自动双工位贴辅料机,包括贴辅料机13,贴辅料机13上设有用于将产品导向的导向机构1、以及用于将产品上料的上料机构2、以及用于将产品进行旋转的旋转机构8、以及用于将产品进行吸附的吸料机构7、以及用于将产品下料的下料机构6、以及用于纠偏的纠偏机构以及控制机构。以上所述构成本实用新型基本结构。
22.在本实施例中,所述导向机构1包括导向轨道以及设于导向轨道上的来料感应器,来料感应器电连接于控制机构。采用这样的结构设置,手工拉线来料通过导向轨道定位到指定的位置,使产品停止流动,其中,来料感应器感应到产品来料,并把来料信号发送给控制机构。
23.在本实施例中,所述上料机构2包括上料机械手以及与上料机械手对应设置的上料机械手滑轨11,上料机械手通过驱动组件可在上料机械手滑轨11可来回滑动。采用这样的结构设置,通过上料机械手把停止在导向轨道上的产品移动到旋转机构8上,其中,上料机械手在上料机械手滑轨11的作用下可来回滑动,便于将产品移动。
24.在本实施例中,所述旋转机构8包括分度盘以及设于分度盘上的多个定位底模9,分度盘上对应设有上料位3、贴合位4、下料位5,上料位3与上料机构2 对应设置,贴合位4与吸料机构7对应设置,下料位5与下料机构6对应设置,分度盘通过控制机构控制旋转。采用这样的结构设置,分度盘接收到上料机构2 移动过来的产品,并开始旋转,把产品移动到贴辅料的贴合位4上,以便于贴辅料机13对产品进行贴合辅料。
25.其工作原理:上料机构2将产品移动至分度盘上的上料位3后,控制机构控制分度盘开始旋转至吸料机构7下方,通过吸料机构7将上料位3上的产品吸附,并放置于分度盘上的贴合位4,便于后序贴辅料,贴完后,吸料机构7再将产品吸附放至下料位5,通过下料机构6将产品移出分度盘。
26.实际应用中,上料位3、贴合位4、下料位5均通过分度盘旋转带动底模实现,当分度盘旋转带动底模旋转至上料位3时,上料机构2工作,当分度盘旋转带动底模旋转至吸料机构7下方时,吸料机构7工作,贴好后的产品通过吸料机构7重新将产品吸附,并放置于分度盘上底模上,分度盘旋转带动底模旋转至下料位5时,下料机构6工作。
27.在本实施例中,所述吸料机构7包括吸料治具以及吸料治具驱动装置。采用这样的结构设置,通过吸料治具驱动装置驱动吸料机构7工作,实现对分度盘上的产品进行吸附,并放置于分度盘上的贴合位4,后序贴好后的产品同样通过吸料治具驱动装置驱动吸料机构7工作,实现对分度盘上的贴合位4的产品进行吸附,并放置于分度盘上的下料位5。
28.在本实施例中,所述下料机构6包括下料机械手以及与下料机械手对应设置的下料机械手滑轨12,下料机械手通过驱动组件可在下料机械手滑轨12可来回滑动。采用这样的结构设置,通过下料机械手将下料位5上产品移出,其中,下料机械手在下料机械手滑轨12的作用下可来回滑动。
29.在本实施例中,所述纠偏机构包括ccd拍照上摄像头与ccd拍照下摄像头, ccd拍照上摄像头与ccd拍照下摄像头分别与吸料机构7对应设置,纠偏机构电连接于控制机构。采用这样的结构设置,通过ccd拍照上摄像头与ccd拍照下摄像头对产品的位置进行拍照,并将纠偏数据反馈至控制机构,通过控制机构把产品的误差传输至吸料机构7,使吸料机构7根据纠偏数据进行修复位置。
30.在本实施例中,所述控制机构包括plc控制系统。采用这样的结构设置,通过电脑系统进行数据接收,并通过相关数据进行控制各部件的工作。
31.在本实施例中,所述贴辅料机13的底部上设有用于滚动的万向滚轮15以及用于定位支撑的定位底撑14。采用这样的结构设置,通过万向滚轮15可以便于贴辅料机13的移动,并通过定位底撑14实现对贴辅料机13的定位。
32.实际应用中,定位底撑14可调节高度。
33.以上结合附图对本实用新型的实施例进行了描述,但本实用新型并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本实用新型的启示下,在不脱离本实用新型宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1