一种智能仓库搬运机器人的制作方法
1.本实用新型属于搬运机器人技术领域,具体涉及一种智能仓库搬运机器人。
背景技术:
2.智能搬运机器人是近代自动控制领域出现的一项高新技术,涉及到了力学,机械学,电器液压气压技术,自动控制技术,传感器技术,单片机技术和计算机技术等学科领域,已成为现代机械制造生产体系中的一项重要组成部分。它的优点是可以通过编程完成各种预期的任务,在自身结构和性能上有了人和机器的各自优势,尤其体现出了人工智能和适应性。如今在仓库内作业过程中,为减小工作人员的工作负担,会使用到这种智能搬运机器人,上侧会设有若干个放置框,工作人员将物品放置在放置框中,通过智能搬运机器人将物品搬运到指定位置,但是通常放置框之间的间距不能调整,当工作人员需要放置一些较大的物品时,不能放入放置框内,且不能调整相邻放置框的间距,使整体的搬运空间利用达不到最优。
技术实现要素:
3.本实用新型的目的是:旨在提供一种智能仓库搬运机器人,可根据需要调整放置框之间的间距,便于工作人员放置较大的物品。
4.为实现上述技术目的,本实用新型采用的技术方案如下:
5.一种智能仓库搬运机器人,包括机体,所述机体下侧四角均装配有移动轮,所述机体上侧固定连接有固定框,所述固定框之间由上至下均匀设有若干组滑轨,每组所述滑轨均包括有两个滑槽,两个所述滑槽分别位于固定框左右两侧内壁,若干所述滑槽下侧均设有限位孔,所述固定框装配有若干个放置框,若干所述放置框左右两侧均设有伸入滑槽的滑条,若干所述放置框底部左右两侧均设有与限位孔位置相匹配的台阶孔,两个所述台阶孔底部均装配有弹簧,两个所述弹簧均固定连接有伸出台阶孔的t形锁件,两个所述t形锁件均与限位孔相匹配,两个所述台阶孔底部均设有通槽,两个所述通槽内部均装配有拉线,所述放置框内部设有与两个通槽相连接的缠绕槽,若干所述缠绕槽内部均转动装配有缠绕杆,两个所述拉线另一端均穿过通槽与缠绕杆固定连接,所述缠绕杆前后两端均贯穿放置框固定连接有转动把手。
6.采用本实用新型技术方案,当需要调整相邻两个放置框之间的间距时,任一转动一个转动把手,带动缠绕杆转动,缠绕杆转动,将两侧的拉线缠绕在缠绕杆上,从而拉动两侧拉线,带动两侧的t形锁件相互靠近,两侧弹簧压缩,两个t 形锁件分别从两侧的限位孔内移出,此时可拉动放置框,滑条在滑槽内滑动,从而可将放置框从固定框内移出,与上同理,可将所放置框从固定框内移出;工作人员可根据放置物品的大小调整若干个放置框之间间距,通过放置框左右两侧的滑条滑入不同的滑槽内,安装放置框时,使放置框左右两侧的滑条与滑槽相匹配,此时转动转动把手,与上同理,将两个t形锁件收入台阶孔内,然后持续滑动放置框,直至两个台阶孔收入固定框之间,此时松开转动把手,通过两个弹簧,伸张,
将两侧的t形锁件向外张开,两个t形锁件贴紧固定框内壁,直至两个t 形锁件分别与两侧的限位孔相匹配,两侧的弹簧伸张,将两个t形锁件分别锁入两个台阶孔内,从而对放置框进行限位;与上同理,工作人员可根据需要将若干个放置框与不同的滑槽相匹配,实现调整若干个放置框之间的间距,从而便于工作人员放置较大的物品,使搬运机器人的搬运空间最大利用化,两个转动把手的设计,便于工作人员从两侧均可取出放置框;本实用新型结构简单,设计合理,可根据需要调整放置框之间的间距,便于工作人员放置较大的物品,使搬运机器人的搬运空间最大利用化。
7.进一步限定,所述转动把手表面均设有花纹。这样的结构,便于工作人员转动转动把手。
8.进一步限定,若干所述放置框内部均装配有防滑垫。这样的结构,增加了放置物品与放置框之间的摩擦性,防止搬运机器人在移动时,放置物品发生摆动。
9.进一步限定,四个所述移动轮均为橡胶轮。这样的结构,使移动轮具有一定的减震能力,在搬运机器人移动时,可对搬运机器人内部的电气元件和放置框内部的放置物进行减震。
10.本实用新型与现有技术相对比具有以下优点:
11.本实用新型结构简单,设计合理,可根据需要调整放置框之间的间距,便于工作人员放置较大的物品,使搬运机器人的搬运空间最大利用化,调节步骤简单,操作便捷,且工作人员从两侧均可取出放置框。
附图说明
12.本实用新型可以通过附图给出的非限定性实施例进一步说明;
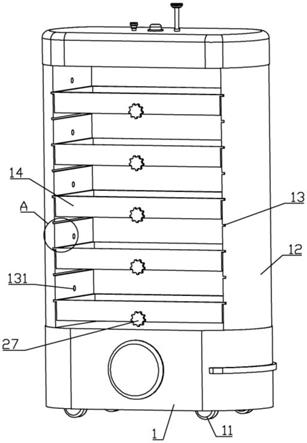
13.图1为本实用新型一种智能仓库搬运机器人实施例的结构示意图;
14.图2为图1中a处的放大结构示意图;
15.图3为本实用新型一种智能仓库搬运机器人实施例放置框的剖面结构示意图;
16.图4为图3中b处的放大结构示意图;
17.图5为图3中b处的放大结构示意图;
18.主要元件符号说明如下:
19.机体1、移动轮11、固定框12、滑槽13、限位孔131、放置框14、防滑垫 141、滑条15、台阶孔2、弹簧21、t形锁件22、通槽23、拉线24、缠绕槽25、缠绕杆26、转动把手27。
具体实施方式
20.为了使本领域的技术人员可以更好地理解本实用新型,下面结合附图和实施例对本实用新型技术方案进一步说明。
21.如图1-5所示,本实用新型的一种智能仓库搬运机器人,包括机体1,机体1下侧四角均装配有移动轮11,机体1上侧固定连接有固定框12,固定框12之间由上至下均匀设有若干组滑轨,每组滑轨均包括有两个滑槽13,两个滑槽13 分别位于固定框12左右两侧内壁,若干滑槽13下侧均设有限位孔131,固定框 12装配有若干个放置框14,若干放置框14左右两侧均设有伸入滑槽13的滑条 15,若干放置框14底部左右两侧均设有与限位孔131位置相匹配的台阶孔2,两个台阶孔2底部均装配有弹簧21,两个弹簧21均固定连接有伸出台阶孔2
的 t形锁件22,两个t形锁件22均与限位孔131相匹配,两个台阶孔2底部均设有通槽23,两个通槽23内部均装配有拉线24,放置框14内部设有与两个通槽 23相连接的缠绕槽25,若干缠绕槽25内部均转动装配有缠绕杆26,两个拉线 24另一端均穿过通槽23与缠绕杆26固定连接,缠绕杆26前后两端均贯穿放置框14固定连接有转动把手27。
22.采用本实用新型技术方案,当需要调整相邻两个放置框14之间的间距时,任一转动一个转动把手27,带动缠绕杆26转动,缠绕杆26转动,将两侧的拉线24缠绕在缠绕杆26上,从而拉动两侧拉线24,带动两侧的t形锁件22相互靠近,两侧弹簧21压缩,两个t形锁件22分别从两侧的限位孔131内移出,此时可拉动放置框14,滑条15在滑槽13内滑动,从而可将放置框14从固定框12 内移出,与上同理,可将所放置框14从固定框12内移出;工作人员可根据放置物品的大小调整若干个放置框14之间间距,通过放置框14左右两侧的滑条15 滑入不同的滑槽13内,安装放置框14时,使放置框14左右两侧的滑条15与滑槽13相匹配,此时转动转动把手27,与上同理,将两个t形锁件22收入台阶孔2内,然后持续滑动放置框14,直至两个台阶孔2收入固定框12之间,此时松开转动把手27,通过两个弹簧21,伸张,将两侧的t形锁件22向外张开,两个t形锁件22贴紧固定框12内壁,直至两个t形锁件22分别与两侧的限位孔 131相匹配,两侧的弹簧21伸张,将两个t形锁件22分别锁入两个台阶孔2内,从而对放置框14进行限位;与上同理,工作人员可根据需要将若干个放置框14 与不同的滑槽13相匹配,实现调整若干个放置框14之间的间距,从而便于工作人员放置较大的物品,使搬运机器人的搬运空间最大利用化,两个转动把手27 的设计,便于工作人员从两侧均可取出放置框14;本实用新型结构简单,设计合理,可根据需要调整放置框14之间的间距,便于工作人员放置较大的物品,使搬运机器人的搬运空间最大利用化。
23.优选转动把手27表面均设有花纹。这样的结构,便于工作人员转动转动把手27。实际上,也可以根据具体情况考虑使用其它结构,便于工作人员转动转动把手27。
24.优选若干放置框14内部均装配有防滑垫141。这样的结构,增加了放置物品与放置框14之间的摩擦性,防止搬运机器人在移动时,放置物品发生摆动。实际上,也可以根据具体情况考虑使用其它结构,增加放置物品与放置框14之间的摩擦性,防止搬运机器人在移动时,放置物品发生摆动。
25.优选四个移动轮11均为橡胶轮。这样的结构,使移动轮11具有一定的减震能力,在搬运机器人移动时,可对搬运机器人内部的电气元件和放置框内部的放置物进行减震。实际上,也可以根据具体情况考虑使用其它结构,可对搬运机器人内部的电气元件和放置框内部的放置物进行减震。
26.上述实施例仅示例性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1