一种燃气具自动装箱夹抱机的制作方法
[0001]
本实用新型涉及一种产品转移设备,具体是一种燃气具自动装箱夹抱机,所述燃气具涵盖壁挂炉、燃气热水器等。
背景技术:
[0002]
现有燃气具生产线中,燃气具随生产线流到包装区时需要由夹抱机将燃气具夹持转移至包装箱定位区,放置好随产品附件包(附件包包括说明书、安装工单、合格证、安装所需螺栓接头等中的一种或一种以上物品)后,将燃气具放入包装箱以完成产品的自动装箱;现有夹抱机存在以下缺陷:1.缺乏有效的力控功能,不能科学控制夹抱力,导致容易夹坏产品,且不能自动适应不同外型尺寸的产品;2.缺乏附件检测功能,不能检测是否有放置附件包,导致出现附件包漏放的问题。
[0003]
因此,需要现有的夹抱机做进一步改进。
技术实现要素:
[0004]
本实用新型的目的在于克服上述现有技术存在的不足,而提供一种燃气具自动装箱夹抱机,其能有效防止燃气具产品被夹坏,且可保证完成附件包的放置。
[0005]
本实用新型的目的是这样实现的:
[0006]
一种燃气具自动装箱夹抱机,包括用于夹持燃气具产品的夹抱装置;所述夹抱装置包括夹持组件和夹抱动力部件;所述夹持组件包括两块以上相对设置的夹块;所述夹抱动力部件传动连接一块以上夹块,以驱动一块以上夹块往复移动;其特征在于:一块以上所述夹块设置有用于监控管理夹块对燃气具产品施加夹持力的距离感应部件和/或用于检测是否有放置附件包的红外感应部件。
[0007]
所述夹块上设有与燃气具产品接触的夹持部,距离感应部件的感应端面与夹持部之间的距离为d,当距离感应部件的感应端面与燃气具产品之间的距离小于或等于d时,夹抱动力部件停止夹持工作;d为1-5mm,优选2mm或5mm。
[0008]
所述红外感应部件所在位置与燃气具产品上用于放置附件包的位置对应。
[0009]
所述红外感应部件具备扫码功能,燃气具产品和/或附件包上设有相应的识别码,红外感应部件扫描所述识别码。
[0010]
本夹抱机还包括龙门框架、横向移栽支架和竖向移栽支架;所述龙门框架与横向移栽支架之间设置有横向驱动组件,横向驱动组件驱动横向移栽支架相对龙门框架横向移动;所述横向移栽支架与竖向移栽支架之间设置有竖向驱动组件,竖向驱动组件驱动竖向移栽支架相对横向移栽支架竖向移动,当红外感应部件没有感应到附件包时,竖向驱动组件停止工作;所述夹抱装置设置于竖向移栽支架上。
[0011]
所述横向驱动组件包括设置于龙门框架上的横向传动齿条、设置于横向移栽支架上的横向驱动电机、以及传动连接横向驱动电机的电机轴的横向传动齿轮,横向传动齿条与横向传动齿轮相啮合。
[0012]
所述竖向驱动组件包括设置于竖向移栽支架上的竖向传动齿条、设置于横向移栽支架上的竖向驱动电机、以及传动连接竖向驱动电机的电机轴的竖向传动齿轮,竖向传动齿条与竖向传动齿轮相啮合。
[0013]
本实用新型的有益效果如下:
[0014]
夹块上设置有用于监控管理夹块对燃气具产品施加夹持力的距离感应部件和/或用于检测是否有放置附件包的红外感应部件;距离感应部件可实时检测其与燃气具产品之间的距离,当彼此之间的距离小于或等于设定值时,系统控制夹抱动力部件停止夹紧工作,进而有效监控管理夹抱力,防止由于夹抱力过大而损坏燃气具产品外观;由于本力控方式是通过检测距离实现,所以可根据燃气具产品外形尺寸自动调节夹块的开合间距,可适应不同的燃气具产品,可见本夹抱机的通用性和实用性较强;此外,红外感应部件可实时检测燃气具产品上是否已经放置附件包,进而有效保证附件包的放置,且红外感应部件还可扫描燃气具产品和/或附件包上的识别码,以便记录生产线品控管理系统中进行加强管理。
附图说明
[0015]
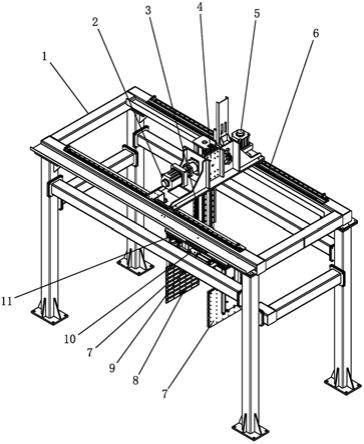
图1为本实用新型一实施例中夹抱机的立体图。
[0016]
图2为本实用新型一实施例中夹抱机的主视图。
[0017]
图3为本实用新型一实施例中夹抱机的俯视图。
[0018]
图4为本实用新型一实施例中夹抱机的左视图。
[0019]
图5为本实用新型一实施例中夹抱机的右视图。
[0020]
图6为本实用新型一实施例中夹抱机的仰视图。
[0021]
图7为图2中h处的放大示意图。
具体实施方式
[0022]
下面结合附图及实施例对本实用新型作进一步描述。
[0023]
参见图1-图6,本燃气具自动装箱夹抱机,包括用于夹持燃气具产品(本实施例涉及的燃气具产品为壁挂炉)的夹抱装置;夹抱装置包括夹持组件和夹抱动力部件10,本实施例涉及的夹抱动力部件10为气缸部件;夹持组件包括两块相对设置的夹块7;夹抱动力部件10传动连接其中一块夹块7,以驱动该夹块7往复移动,使两夹块7相互靠拢或远离;一块以上夹块7设置有用于监控管理夹块7对燃气具产品施加夹持力的距离感应部件8和用于检测是否有放置附件包的红外感应部件9;距离感应部件8可实时检测其与燃气具产品之间的距离,当彼此之间的距离小于或等于设定值时,系统控制夹抱动力部件10停止夹紧工作,进而有效监控管理夹抱力,防止由于夹抱力过大而损坏燃气具产品外观;由于本力控方式是通过检测距离实现,所以可根据燃气具产品外形尺寸自动调节夹块的开合间距,可适应不同的燃气具产品,可见本夹抱机的通用性和实用性较强;此外,红外感应部件9可实时检测燃气具产品上是否已经放置附件包,进而有效保证附件包的放置。
[0024]
进一步地,夹块7内侧壁上设有与燃气具产品接触的夹持部701,距离感应部件8的感应端面与夹持部701之间的距离为d,当距离感应部件8的感应端面与燃气具产品之间的距离小于或等于d时,夹抱动力部件10停止夹持工作;d为5mm。当距离感应部件8检测到的距离为d时,说明夹持部701与燃气具产品表面相接触,夹持部701开始夹抱燃气具产品;当检
测距离小于d时,说明夹抱力过大且开始对燃气具产品造成变形(这种变形是可自行恢复的),所以系统控制夹抱动力部件10停止工作,以避免夹抱力增大至损坏燃气具产品外观。
[0025]
进一步地,红外感应部件9所在位置与燃气具产品上用于放置附件包的位置对应,以保证附件包的放置位置落入红外感应部件9的检测范围内。
[0026]
进一步地,红外感应部件9具备扫码功能,燃气具产品和/或附件包上设有相应的识别码,红外感应部件9扫描识别码;识别码可以是二维码、条形码等起标识作用的图案。红外感应部件9通过扫描燃气具产品和/或附件包上的识别码,以便记录生产线品控管理系统中进行加强管理。
[0027]
进一步地,本夹抱机还包括龙门框架1、横向移栽支架4和竖向移栽支架11;龙门框架1与横向移栽支架4之间设置有横向驱动组件,横向驱动组件驱动横向移栽支架4相对龙门框架1横向移动;横向移栽支架4与竖向移栽支架11之间设置有竖向驱动组件,竖向驱动组件驱动竖向移栽支架11相对横向移栽支架4竖向移动,当红外感应部件9没有感应到附件包时,系统自行判定没有放置附件包并控制竖向驱动组件停止驱动壁挂炉下降装箱的工作,以杜绝出现漏放附件包的现象;夹抱装置设置于竖向移栽支架11上。
[0028]
进一步地,横向驱动组件包括设置于龙门框架1上的横向传动齿条6、设置于横向移栽支架4上的横向驱动电机5、以及传动连接横向驱动电机5的电机轴的横向传动齿轮13,横向传动齿条6与横向传动齿轮13相啮合。
[0029]
进一步地,竖向驱动组件包括设置于竖向移栽支架11上的竖向传动齿条3、设置于横向移栽支架4上的竖向驱动电机2、以及传动连接竖向驱动电机2的电机轴的竖向传动齿轮12,竖向传动齿条3与竖向传动齿轮12相啮合。
[0030]
本夹抱机利用距离感应部件8与夹抱动力部件10的协作配合,有效实现力控管理,避免夹抱力过大而损坏燃气具产品外观;本夹抱机利用红外感应部件9与竖向驱动组件的协作配合,有效检测附件包是否已经放置于燃气具产品上,才执行装箱动作,可避免人为漏放附件包的情况。
[0031]
工作流程:壁挂炉随生产线流到包装区,竖向驱动组件驱动夹抱装置自动下降到指定位置,夹抱装置自动夹持(夹抱动力部件10驱动两夹块7相互靠拢)壁挂炉,夹抱过程中距离感应部件8检测其与壁挂炉之间的距离d,当d≤5mm时,为防止夹抱力过大损坏壁挂炉外观,系统控制夹抱动力部件10停止工作;竖向驱动组件驱动夹抱装置自动升起,横向驱动组件驱动夹抱装置横向移动至包装箱定位区域,工人放置与壁挂炉对应的附件包,附件包放置到位后会遮挡红外感应部件9,即红外感应部件9可检测到附件包,此时系统才会控制竖向驱动组件驱动夹抱装置自动下降至指定位置,夹抱装置松开使壁挂炉落入下方的包装箱中,以完成壁挂炉的自动装箱。
[0032]
上述为本实用新型的优选方案,显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本领域的技术人员应该了解本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1