一种自动包装机快速换袋装置的制作方法
1.本实用新型属于包装机配件领域,更具体的说涉及一种自动包装机快速换袋装置。
背景技术:
2.现有技术中,包装机早已实现自动化定量包装。在包装机上设置有用于放置空袋的空袋位、用于下料导料的料斗、设置在料斗下部用于打开袋口的开袋装置,和用于固定空袋的张袋装置、实现将空袋由空袋位输送至开袋装置上的上袋装置和在下料完成后对满袋进行输送的满袋输送带。由于现有的上袋装置上袋方向与满袋输送带输送方向垂直,需要在一袋包装完成后,首先满袋输送带将满袋输送出去,然后上袋装置在进行上料。这样就大大延长了换袋时间,降低了包装机的包装效率。
技术实现要素:
3.本实用新型的目的在于提供一种自动包装机快速换袋装置,实现在将满袋输送出料斗底部的同时上袋装置即进行同步上袋,缩短换袋时间,提高包装机的包装效率。
4.本实用新型技术方案一种自动包装机快速换袋装置,包括上袋装置和移袋装置,所述上袋装置将空袋输送至料斗下部的开袋装置上并被开袋装置打开装料,所述移袋装置将下料完成后的满袋输送出开袋装置下部,所述移袋装置包括摆动方向与满袋输送方向一致的移袋摆臂,所述移袋摆臂靠近满袋端设置有移袋夹紧组件,所述移袋夹紧组件夹紧满袋口部并在移袋摆臂带动下将满袋快速输出料斗下部,同时,上袋装置将空袋同步输送至料斗下部。
5.优选地,所述移袋夹紧组件包括对称设置在满袋输送带两侧的两移袋夹紧头,两所述移袋夹紧头均包括移袋夹爪和整袋组件,所述移袋夹爪夹紧满袋口部,然后整袋组件拉动移袋夹爪对满袋口部拉平。
6.优选地,所述移袋夹爪包括相对设置的两夹杆,两夹杆远离满袋端连接有一夹袋曲柄连杆组件和夹袋气缸,所述夹袋气缸通过夹袋曲柄连杆组件带动两夹杆对满袋口部进行夹紧;所述夹袋气缸上连接有夹袋座,所述夹袋曲柄连杆组件与夹袋座铰接。
7.优选地,所述整袋组件包括与分别与两夹袋座铰接的两整袋曲柄连杆组件,两所述整袋曲柄连杆组件上均分别连接有整袋气缸,所述整袋气缸带动移袋夹爪整体向外移动,实现将满袋袋口拉平;所述整袋气缸上连接有整袋座,所述整袋曲柄连杆组件与整袋座铰接;所述整袋座与移袋摆臂靠近满袋端铰接。
8.优选地,所述移袋摆臂远离满袋端铰接有摆臂座,移袋摆臂上连接有由移袋伺服电机驱动的摆臂曲柄连杆组件,所述移袋伺服电机驱动摆臂曲柄连杆组件带动移动摆臂绕其与摆臂座铰接处为轴摆动,从而带动移袋夹紧组件和满袋输送出料斗下部位置。
9.优选地,所述上袋装置包括两相对设置的上袋摆杆,两所述上袋摆杆上连接有上袋伺服电机,所述上袋伺服电机通过方型连接轴带动两上袋摆杆同步摆动,使得上袋摆杆
靠近空袋端在空袋输送端和开袋装置之间往复摆动;两所述上袋摆杆远离方型连接轴端均设置有上袋夹紧组件,所述上袋夹紧组件包括上袋夹爪和连接在上袋夹爪后部且带动上袋夹爪开合的上袋气缸。
10.优选地,所述上袋装置和移袋装置上连接有plc控制器,所述plc控制器控制上袋伺服电机和移袋伺服电机同时工作,控制上袋气缸、整袋气缸和夹袋气缸工作时间。
11.本实用新型技术方案的一种自动包装机快速换袋装置的有益效果是:
12.1、设置移袋装置,移袋装置对满袋的袋口进行夹紧和拉平,实现对满袋袋口整袋,便于封口。
13.2、上袋装置和移袋装置同时工作,在满袋输出时即同步进行上袋,缩短换袋时间,提高包装机的包装效率。
附图说明
14.图1为本实用新型技术方案的自动包装机的包装装置结构示意图,
15.图2为本实用新型技术方案的自动包装机的包装装置另一视角示意图,其中靠近外侧的一开袋夹爪未画出,
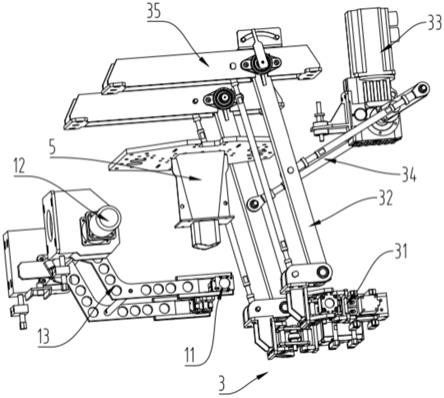
16.图3为本实用新型技术方案的一种自动包装机快速换袋装置结构示意图,
17.图4为图3的前视图,
18.图5为移袋装置结构示意图,
19.图6为移袋装置另一视角结构示意图,
20.图7为移袋夹紧组件结构示意图,
21.图8为移袋夹紧组件另一视角结构示意图,
22.图9为上袋装置结构示意图。
具体实施方式
23.下面结合附图和具体实施方式对本实用新型作进一步详细的说明。本实用新型的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本实用新型限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本实用新型的原理和实际应用,并且使本领域的普通技术人员能够理解本实用新型从而设计适于特定用途的带有各种修改的各种实施例。
24.如图1和图2所示,本实用新型技术方案的自动包装机包装位置的包装装置结构示意图。其包括用于包装下料导料的料斗5,在料斗5下部设置有将空袋袋口打开的开袋装置7。开袋装置7包括有两相对设置的吸袋盘71和两相对设置的开袋夹爪72,在开袋口时,首先两开袋夹爪72对向夹住袋口,然后两吸袋盘71靠近实现将空袋袋口吸开,这样两个方向上的作用力同时作用才能够将袋口打开。在袋口打开后,设置在料斗5下部的张袋装置73将空袋袋口向外张紧并套设在料斗5下部,实现下料包装。
25.现有技术中,为了降低包装机整机的体积和占地空间,一般的是将满袋输送带6与上袋方向垂直设置。在完成下料后,张袋装置73放松满袋的袋口,然后由首先由一与满袋输送带6输送方向垂直的过渡输送带将满袋输送至满袋输送带6上,然后由一与满袋输送带6同步运动的满袋袋口夹紧机构对满袋100的袋口进行夹紧,并随着满袋输送带6一起将满袋
输送出去,待满袋被完全输送离开料斗底部后,上袋装置1才开始工作,将空袋由空袋位输送至开袋装置7,实现上袋。这种操作方式和过程,使得换袋时间长,包装效率低。
26.针对上述问题,提出了如图3和图4所示的自动包装机快速换袋装置,其在原有的包装机上去除原来随满袋输送带6同步运动的满袋袋口夹紧机构,增设了一移动装置3。自动包装机快速换袋装置包括上袋装置1和移袋装置3,上袋装置1将空袋输送至料斗5下部的开袋装置7上并被开袋装置7打开装料。移袋装置3将下料完成后的满袋100输送出开袋装置7下部。移袋装置3包括摆动方向与满袋输送带6输送满袋方向一致的移袋摆臂32。移袋摆臂32靠近满袋100端设置有移袋夹紧组件31。移袋夹紧组件31在下料完成后夹紧满100袋口部并在移袋摆臂32带动下将满袋100快速输出料斗5下部,同时,上袋装置1将空袋同步输送至料斗5下部。
27.由上段技术方案中可见,利用移动摆臂32快速的将满袋100口部固定并摆动至满袋输送带6上,避免了现有技术中利用过渡输送带将满袋输送在满袋输送带上的时间浪费。即利用移动摆臂32快速的移出满袋100,在瞬间即可将料斗下部位置让出,所以,这里满袋移出和空袋上袋可同步进行,大大缩短了换袋时间,有效的提高了包装机的包装效率。
28.如图5至图7所示,移袋夹紧组件31包括对称设置在满袋输送带6两侧的两移袋夹紧头,两移袋夹紧头均包括移袋夹爪311和整袋组件312,移袋夹爪311夹紧满袋100口部,然后整袋组件312拉动移袋夹爪311对满袋口部拉平,便于后一工位对满袋100口部进行封口。
29.如图7所示,移袋夹爪311包括相对设置的两夹杆3111,两夹杆3111远离满袋100端连接有一夹袋曲柄连杆组件3113和夹袋气缸3114。夹袋气缸3114通过夹袋曲柄连杆组件3113带动两夹杆3111对满袋100口部进行夹紧。具体为在夹袋气缸3114端部设置一齿条3112,利用齿条3112带动两分别与两夹袋曲柄连杆组件3113连接的齿轮3116旋转,即带动夹袋曲柄连杆组件3113实现两夹杆3111呈现最大180
°
的开合,实现对满袋100口部进行夹紧。两夹杆3111开合范围大,便于对满袋口部进行夹紧操作。在夹袋气缸3114上连接有夹袋座3115,夹袋曲柄连杆组件3113与夹袋座3115铰接。
30.如图7所示,整袋组件312包括与分别与两夹袋座315铰接的两整袋曲柄连杆组件3121。两整袋曲柄连杆组件3121上均分别连接有整袋气缸3122,整袋气缸3122带动移袋夹爪311整体向外移动,实现将满袋100袋口拉平。整袋气缸3122上连接有整袋座3123,整袋曲柄连杆组件3121与整袋座3123铰接。整袋座3123与移袋摆臂32靠近满袋100端铰接。移袋摆臂32通过整袋组件312和移袋夹爪311带动满袋100瞬间由料斗5下部移动至满袋输送带6上。
31.如图5和图6所示,移袋摆臂32远离满袋100端铰接有摆臂座35,移袋摆臂32上连接有由移袋伺服电机33驱动的摆臂曲柄连杆组件34。移袋伺服电机33驱动摆臂曲柄连杆组件34带动移动摆臂32绕其与摆臂座35铰接处为轴摆动,从而带动移袋夹紧组件和满袋100输送出料斗下部位置。利用移动摆臂32的摆动实现对满袋移动,相较于输送带的方式,一方面移动输送快速,效率高,另一方面在满袋转移中对袋口进行拉平,便于后续封口。
32.如图9,上袋装置1包括两相对设置的上袋摆杆13,两上袋摆杆13上连接有上袋伺服电机12,上袋伺服电机12通过方型连接轴14带动两上袋摆杆13同步摆动,使得上袋摆杆13靠近空袋端在空袋输送端和开袋装置7之间往复摆动。两上袋摆杆13远离方型连接轴14端均设置有上袋夹紧组件11。上袋夹紧组件11包括上袋夹爪111和连接在上袋夹爪111后部
且带动上袋夹爪111开合的上袋气缸112。上袋气缸112带动上袋夹爪111张开,将空袋位上的空袋进行夹取并提升至开袋装置7上,开袋装置7对空袋进行开口。
33.本技术方案中上袋装置1和移袋装置3上连接有plc控制器。plc控制器控制上袋伺服电机和移袋伺服电机同时工作,控制上袋气缸、整袋气缸和夹袋气缸工作时间。plc控制器通过各个部件的工作点和工作时间控制各个电机或气缸的启闭,确保移袋和上袋同步进行,提高换袋速度,提高包装机包装效率。
34.显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域及相关领域的普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都应属于本实用新型保护的范围。本实用新型中未具体描述和解释说明的结构、装置以及操作方法,如无特别说明和限定,均按照本领域的常规手段进行实施。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1