12-43寸与AGV对接偏光片全自动投料设备的制作方法
12
‑
43寸与agv对接偏光片全自动投料设备
技术领域
1.本实用新型属于智能制造相关技术领域,具体涉及12
‑
43寸与agv对接偏光片全自动投料设备。
背景技术:
2.智能制造源于人工智能的研究,一般认为智能是知识和智力的总和,前者是智能的基础,后者是指获取和运用知识求解的能力,智能制造应当包含智能制造技术和智能制造系统,智能制造系统不仅能够在实践中不断地充实知识库,而且还具有自学习功能,还有搜集与理解环境信息和自身的信息,并进行分析判断和规划自身行为的能力。
3.现有的全自动投料设备技术存在以下问题:目前国内的偏光片加工行业,因为没有合适的自动投料设备,都需要通过人工进行物料补充,但人工进行物料补充不适合无人操作车间具有相当的使用局限性问题。
技术实现要素:
4.本实用新型的目的在于提供12
‑
43寸与agv对接偏光片全自动投料设备,以解决上述背景技术中提出的目前国内的偏光片加工行业,因为没有合适的自动投料设备,都需要通过人工进行物料补充,但人工进行物料补充不适合无人操作车间具有相当的使用局限性问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.12
‑
43寸与agv对接偏光片全自动投料设备,包括框架和旋转顶升模组,所述框架的顶端端面前方位置处连接有旋转顶升模组,所述旋转顶升模组的左端端面连接有下输送线,所述下输送线的上方连接有上输送线,所述上输送线的上方在位于旋转顶升模组的顶端端面设置有周转治具,所述周转治具的后方设置有buffer工站,所述buffer工站的后方设置有后顶升模组,所述后顶升模组的后方设置有提升模组,所述提升模组的后方右侧位置处设置有水平搬运模组,所述水平搬运模组的左侧设置有外皮带线,所述周转治具包括有偏光片、磁性治具座、牛眼顶升孔和磁性治具板,所述磁性治具板顶端端面右侧设置有牛眼顶升孔,所述牛眼顶升孔的左侧设置有偏光片,所述偏光片的后方设置有磁性治具座。
7.优选的,所述旋转顶升模组包括有定位销、旋转台和顶升模体,所述顶升模体的顶端端面连接有旋转台,所述旋转台的顶端端面连接有定位销,所述下输送线包括有滚轮限位机构、动力电机、感应器和输送链,所述动力电机的顶端端面连接有滚轮限位机构,所述滚轮限位机构的顶端端面连接有输送链,所述输送链的顶端端面连接有感应器,所述提升模组包括有提升膜体和吸附气缸,所述提升膜体的底端端面前方位置处连接有吸附气缸,所述水平搬运模组包括有固定电机、水平膜组和真空吸嘴,所述水平膜组的顶端端面前方位置处连接有固定电机且底端端面后方位置处连接有真空吸嘴,所述外皮带线包括有防静电皮带线和稳定电机,所述稳定电机的顶端端面连接有防静电皮带线。
8.优选的,所述上输送线可带动周转治具相对于框架进行前后运动,所述周转治具
的底端端面与上输送线的顶端端面为相贴合设置,所述上输送线和下输送线为相匹配对称设置,所述旋转顶升模组可相对于框架进行上下运动,所述下输送线的顶端端面设置有均匀分布的后顶升模组,所述后顶升模组可通过下输送线相对于框架进行前后运动。
9.优选的,所述水平搬运模组可通过管道与外部设备固定连接,所述水平搬运模组和外皮带线皆可进行前后运动,所述提升模组的底端端面高于水平搬运模组的顶端端面,所述提升模组的左端端面与外皮带线的顶端端面为贯通设置,所述框架的前端端面设置有操作控制面板。
10.优选的,所述偏光片可相对于磁性治具座进行运动,所述磁性治具板的顶端端面设置有均匀分布的磁性治具座和牛眼顶升孔,所述动力电机可带动输送链进行运动,所述动力电机可与外部电源电性连接。
11.优选的,所述感应器的顶端端面突出于输送链的顶端端面,所述顶升模体的顶端端面设置有丝杆可带动定位销和旋转台进行上下运动,所述提升膜体的底端端面设置有水平分布的吸附气缸。
12.优选的,所述吸附气缸的底端端面具有弹性可伸缩,所述提升膜体可通过软管与外部设备固定连接,所述固定电机可与外部电源电性连接,所述水平膜组的底端端面设置有水平分布的真空吸嘴。
13.优选的,所述水平膜组的内表面设置有对称分布的滑动模组,所述防静电皮带线的内表面设置有防静电涂层结构,所述稳定电机的顶端端面设置有减速机与防静电皮带线的后端端面固定连接。
14.与现有技术相比,本实用新型提供了12
‑
43寸与agv对接偏光片全自动投料设备,具备以下有益效果:
15.1、本实用新型可实现自动化上料工作,在日常使用中可适应无人操作和人工投料等多种方式,具有相当强的操作灵活性,同时设备的整体操作较为简单,使用者更容易上手操作,同时设备本身的结构较为完善,可有效的避免出现叠料等问题。
16.2、本实用新型在使用中可持续对物料进行输送,同时整体的损耗较小,可在特殊情况下避免人工投料带来的危险性问题,本设备在使用中可适用于无人操作车间,在使用中具有相当强的实用性,可满足使用者的多种投料需求。
附图说明
17.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制,在附图中:
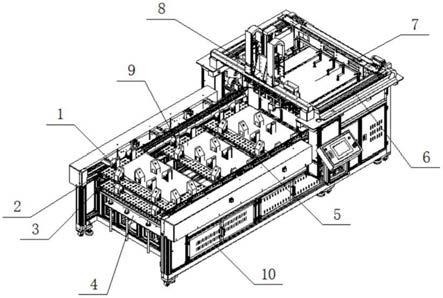
18.图1为本实用新型提出的12
‑
43寸与agv对接偏光片全自动投料设备结构示意图;
19.图2为本实用新型提出的周转治具结构示意图;
20.图3为本实用新型提出的旋转顶升模组结构示意图;
21.图4为本实用新型提出的下输送线结构示意图;
22.图5为本实用新型提出的提升模组结构示意图;
23.图6为本实用新型提出的水平搬运模组结构示意图;
24.图7为本实用新型提出的外皮带线结构示意图;
25.图中:1、周转治具;2、上输送线;3、下输送线;4、旋转顶升模组;5、后顶升模组;6、
水平搬运模组;7、外皮带线;8、提升模组;9、buffer工站;10、框架;11、偏光片;12、磁性治具座;13、牛眼顶升孔;14、磁性治具板;31、滚轮限位机构;32、动力电机;33、感应器;34、输送链;41、定位销;42、旋转台;43、顶升模组;61、固定电机;62、水平膜组;63、真空吸嘴;71、防静电皮带线;72、稳定电机;81、提升膜体;82、吸附气缸。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.请参阅图1
‑
7,本实用新型提供12
‑
43寸与agv对接偏光片全自动投料设备技术方案:
28.12
‑
43寸与agv对接偏光片全自动投料设备,包括框架10和旋转顶升模组4,框架10的前端端面设置有操作控制面板,框架10的顶端端面前方位置处连接有旋转顶升模组4,旋转顶升模组4包括有定位销41、旋转台42和顶升模体43,顶升模体43的顶端端面连接有旋转台42,旋转台42的顶端端面连接有定位销41,顶升模体43的顶端端面设置有丝杆可带动定位销41和旋转台42进行上下运动,旋转顶升模组4的左端端面连接有下输送线3,下输送线3包括有滚轮限位机构31、动力电机32、感应器33和输送链34,动力电机32的顶端端面连接有滚轮限位机构31,滚轮限位机构31的顶端端面连接有输送链34,输送链34的顶端端面连接有感应器33,动力电机32可带动输送链34进行运动,动力电机32可与外部电源电性连接,感应器33的顶端端面突出于输送链34的顶端端面。
29.12
‑
43寸与agv对接偏光片全自动投料设备,包括下输送线3的上方连接有上输送线2,上输送线2可带动周转治具1相对于框架10进行前后运动,周转治具1的底端端面与上输送线2的顶端端面为相贴合设置,上输送线2和下输送线3为相匹配对称设置,旋转顶升模组4可相对于框架10进行上下运动,下输送线3的顶端端面设置有均匀分布的后顶升模组5,后顶升模组5可通过下输送线3相对于框架10进行前后运动,上输送线2的上方在位于旋转顶升模组4的顶端端面设置有周转治具1,偏光片11可相对于磁性治具座12进行运动,磁性治具板14的顶端端面设置有均匀分布的磁性治具座12和牛眼顶升孔13,周转治具1的后方设置有buffer工站9,buffer工站9的后方设置有后顶升模组5,后顶升模组5的后方设置有提升模组8,提升模组8的底端端面高于水平搬运模组6的顶端端面,提升模组8的左端端面与外皮带线7的顶端端面为贯通设置,提升模组8包括有提升膜体81和吸附气缸82,提升膜体81的底端端面前方位置处连接有吸附气缸82,提升膜体81的底端端面设置有水平分布的吸附气缸82,吸附气缸82的底端端面具有弹性可伸缩,提升膜体81可通过软管与外部设备固定连接。
30.12
‑
43寸与agv对接偏光片全自动投料设备,包括提升模组8的后方右侧位置处设置有水平搬运模组6,水平搬运模组6可通过管道与外部设备固定连接,水平搬运模组6和外皮带线7皆可进行前后运动,水平搬运模组6包括有固定电机61、水平膜组62和真空吸嘴63,水平膜组62的顶端端面前方位置处连接有固定电机61且底端端面后方位置处连接有真空吸嘴63,固定电机61可与外部电源电性连接,水平膜组62的底端端面设置有水平分布的真
空吸嘴63,水平膜组62的内表面设置有对称分布的滑动模组,水平搬运模组6的左侧设置有外皮带线7,外皮带线7包括有防静电皮带线71和稳定电机72,稳定电机72的顶端端面连接有防静电皮带线71,防静电皮带线71的内表面设置有防静电涂层结构,稳定电机72的顶端端面设置有减速机与防静电皮带线71的后端端面固定连接,周转治具1包括有偏光片11、磁性治具座12、牛眼顶升孔13和磁性治具板14,磁性治具板14顶端端面右侧设置有牛眼顶升孔13,牛眼顶升孔13的左侧设置有偏光片11,偏光片11的后方设置有磁性治具座12。
31.本实用新型的工作原理及使用流程:本实用新型安装好过后,首先将设备放置在需要使用的位置处,其后可通过框架10的前端端面操作控制面板对设备的运行模式等进行调节,而后当外部agv将周转治具1放置在下输送线3的顶端端面时,旋转顶升模组4可将模组抬升并定位周转治具1,同时在使用中可根据使用情况进行角度调节,然后动力电机32通过输送链34带动周转治具1进行向后运动,随后周转治具1被输送至buffer工站9的顶端端面处,随后顶升模组5对其吸附并抬升一片偏光体,同时根据抬升情况判断是否出现叠料等情况,然后提升膜体81带动吸附气缸82进行上下运动,同时吸附气缸82与外部气泵固定连接对下方偏光体进行强力吸附,随后在提升膜体81的带动下偏光体跟随吸附气缸82回归至原本高度位置处,然后偏光体被水平膜组62底端端面水平分布的真空吸嘴63所吸附,同时吸附气缸82与外部气泵断开连接与偏光体断开,而后偏光体被真空吸嘴63所固定,然后固定电机61通过丝杆带动真空吸嘴63在水平膜组62的内表面滑槽内进行向后运动,随后在到达指定位置后对偏光体分离,其后偏光体到达外皮带线7的顶端端面处,而后在外皮带线7的带动下偏光体到达下一工序位置处。
32.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1