一种码垛装置的制作方法
1.本申请涉及码垛设备的领域,尤其是涉及一种码垛装置。
背景技术:
2.传统的码垛治具包括钩式治具、夹紧式治具与单箱吸盘式治具。但是传统的码垛治具能够码放的产品码放量相对较小,多次码放产品时,工作效率相对较低。
3.现有相关技术中申请号为cn201810538610.5的中国专利公开了一种码垛装置、码垛治具及码垛方法,其码垛装置和码垛治具的技术要点为:包括支架、多个吸盘和夹紧组件,吸盘连接在支架的同一侧面;夹持组件设置于支架,夹紧组件包括驱动机构、第一夹持件与第二夹持件,第一夹持件与第二夹持件并列间隔设置,第一夹持件与第二夹持件分别位于支架的相对两侧,且吸盘位于第一夹持件与第二夹持件之间,驱动机构分别与第一夹持件、第二夹持件传动相连,驱动机构用于驱动第一夹持件与第二夹持件相向运动夹持码垛产品;码垛装置包括码垛机器人,码垛机器人的驱动臂与支架相连。
4.针对上述中的相关技术,发明人认为在实际使用过程中,在需要对袋装物料做码垛时,采用吸盘对物料做码垛时,吸附相对较为不稳定,导致码垛整齐度相对较差。
技术实现要素:
5.为了有效的优化码垛时的稳定性,本申请提供一种码垛装置。
6.本申请提供的一种码垛装置采用如下的技术方案:
7.一种码垛装置,包括码垛机器人,还包括设置于码垛机器人侧部的整平机构,所述码垛机器人的侧部设置有机架,所述整平机构包括用于传输物料袋的传送带和用于压平物料袋的压紧件,所述传送带设置于机架,所述压紧件包括多个沿传送带分布方向分布的压紧辊和套设于多个压紧辊的压紧带,所述压紧辊垂直于传送带的传输方向且压紧辊转动连接于机架,所述压紧带位于传送带的上方。
8.通过采用上述技术方案,在使用时,物料袋先被通过机架设置于地面的传送带传输,在传输的过程中,套设于多个压紧辊的压紧带能够相对较为均匀的将物料袋压平,以使得码垛机器人在通过多个吸盘吸附不同物料袋时,能够有效的减小因物料袋带面正平整部分吸盘吸附物料袋时不稳定的情况,并能够通过压紧辊在压紧带压平物料的过程中,减小压紧带对物料袋产生的阻碍,使得使用时整体相对较为稳定。
9.可选的,多个所述压紧辊的中心沿压紧带的长度连线的轮廓呈等腰梯形或直角梯形,多个所述压紧辊中心连线轮廓的小端朝下,所述压紧带套设于多个压紧辊中心连线轮廓的斜腰部分朝向物料传入的方向。
10.通过采用上述技术方案,能够使得物料袋在被压合于压紧带和传送带的带面之间时,对物料袋做相对较为平缓的过度,以优化使用的稳定性的同时,减小压平的过程中物料袋产生过多褶皱影响码垛机器人的吸盘吸附的可能性。
11.可选的,所述机架设置有支架,所述支架设置有用于调节压紧件高度的调节机构。
12.通过采用上述技术方案,在对不同规格的物料袋做码垛时,能够通过调节机构调整压紧件的高度,以适应不同规格的物料袋,优化使用效果。
13.可选的,所述调节机构包括呈框状结构的连接件和用于调节连接件高度的调节件,所述压紧辊转动连接于连接件。
14.通过采用上述技术方案,在调整压紧件的高度时,只需通过调节件调节连接件的高度即可,整体相对较为便捷。
15.可选的,所述调节件包括多个转动连接于连接件的调节杆和用于控制调节杆转动的控制杆,所述控制杆转动连接于支架,所述调节杆的上端转动连接于支架。
16.通过采用上述技术方案,在需要调节压紧件的高度时,只需通过控制杆控制调节杆转动,使得连接件跟随调节杆摆动即可使得连接件的高度改变。
17.可选的,所述调节杆和控制杆之间设置有传动件,所述传动件包括固定连接于调节杆的从动蜗轮和啮合于多个从动蜗轮的传动蜗杆,所述传动蜗杆同轴固定有从动锥齿轮,所述控制杆同轴固定连接有啮合于从动锥齿轮的主动锥齿轮,所述从动蜗轮与调节杆两者的转动平面相互平行。
18.通过采用上述技术方案,在控制杆控制调节杆转动时,只需使得控制杆转动带动主动锥齿轮转动,并使得主动锥齿轮通过从动锥齿轮带动传动蜗杆转动,从而带动多个从动蜗轮转动,转动的从动蜗轮带动其连接的调节杆转动即可。
19.可选的,所述机架设置有多个限制物料袋的膨胀以及滑落传送带的限制件,多个所述限制件分为两组且两组分别设置于传送带传输方向的两侧。
20.通过采用上述技术方案,由于在使用时,是通过码垛机器人做码垛,对物料袋的位置精度相对较高,此时通过限制件对传送带带面的物料袋做限制和导引,以使得被压平后的物料袋相对传送带的位置能够固定,优化使用效果。
21.可选的,所述限制件包括平行于传送带传输方向的限制板、至少一个固定于限制板的连接杆和外套并螺纹连接于连接杆的控制螺母,所述连接杆垂直于传送带的传输方向,所述控制螺母转动连接于机架。
22.通过采用上述技术方案,能够通过限制板对物料袋做限制和导引的同时,还能够通过转动控制螺母使得连接杆轴向滑移,带动限制板沿连接杆的轴向滑移,以能够适应不同规格的物料袋。
23.可选的,所述机架设置有多个连接板,所述连接板开设有长条形孔,所述控制螺母开设有环槽,所述长条形孔的开口边沿卡设于环槽内。
24.通过采用上述技术方案,控制螺母能够通过长条形孔的开口边沿卡设于环槽而转动连接于连接板,并使得控制螺母沿长条形孔滑移做适应性的位置调整,以优化使用效果。
25.综上所述,本申请包括以下至少一种有益技术效果:
26.1.在使用时,物料袋先被通过机架设置于地面的传送带传输,在传输的过程中,套设于多个压紧辊的压紧带能够相对较为均匀的将物料袋压平,以使得码垛机器人在通过多个吸盘吸附不同物料袋时,能够有效的减小因物料袋带面正平整部分吸盘吸附物料袋时不稳定的情况,并能够通过压紧辊在压紧带压平物料的过程中,减小压紧带对物料袋产生的阻碍,使得使用时整体相对较为稳定。
附图说明
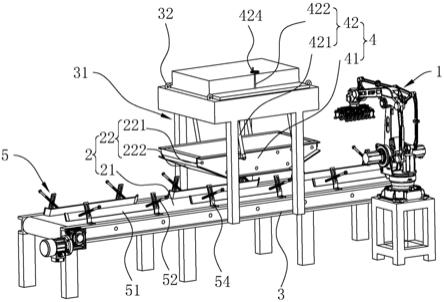
27.图1是本申请实施例的结构示意图;
28.图2是本申请实施例的局部剖视图;
29.图3是图2中a部分的放大示意图;
30.图4是图2中b部分的放大示意图。
31.附图标记说明:1、码垛机器人;2、整平机构;21、传送带;22、压紧件;221、压紧辊;222、压紧带;3、机架;31、支架;32、吊耳;4、调节机构;41、连接件;42、调节件;421、调节杆;422、控制杆;423、传动杆;424、转盘;43、传动件;431、从动蜗轮;432、传动蜗杆;433、从动锥齿轮;434、主动锥齿轮;5、限制件;51、限制板;52、连接杆;53、控制螺母;531、环槽;54、连接板;541、长条形孔。
具体实施方式
32.以下结合附图1
‑
4对本申请作进一步详细说明。
33.本申请实施例公开一种码垛装置。参照图1和图2,码垛装置包括码垛机器人1和设置于码垛机器人1侧部的整平机构2,以用于在码垛机器人1通过治具吸取物料袋之前,对物料袋做整平,使得不同物料袋能够相对较为充分的贴合于码垛机器人1的驱动臂连接的吸盘,从而优化使用时的稳定性。
34.码垛机器人1的侧部还对应整平机构2设置有机架3,整平机构2包括用于传输物料袋的传送带21和用于压平物料袋的压紧件22,其中传送带21可选用市售的皮带传输机。压紧件22包括多个轴向垂直于传送带21的传送方向的压紧辊221和压紧带222,多个压紧辊221沿传送带21的分布方向分布,并且多个压紧辊221的分布路径呈环状。压紧带222套设于多个压紧辊221。压紧辊221转动连接于机架3,并且压紧带222位于传送带21的上方,以使得传送带21传送物料时,物料袋会通过压紧带222和传送带21的带面之间,从而能够通过压紧带222和传送带21的带面将传送带21传送的物料压平并做整平。
35.此外,为了使得物料袋能够相对较为顺畅的导入至压紧带222和传送带21的上带面之间,多个压紧辊221的分布路径呈等腰梯形或直角梯形,即使得多个压紧辊221的中心沿压紧带222的带面连线的轮廓呈等腰梯形或直角梯形,多个压紧辊221的中心沿压紧带222的带面连线的轮廓的小端朝下。并使得压紧带222套设于多个压紧辊221中心连线轮廓的斜腰部分朝向物料传入的方向,以使得物料袋在被传送带21穿入至其与压紧带222之间时,压紧带222的倾斜部能够对物料袋做导引和过渡,以优化使用时的稳定性,减少物料袋在被整平的过程中出现的褶皱。
36.参照图1和图2,机架3的顶部设置有支架31,支架31由多个分别固定于机架3两侧部的支撑杆和固定连接于多个支撑杆顶部的安装盖组成,并且安装盖的顶部的角部分别固定连接有吊耳32,以便于装运。安装盖的内侧设置有用于调节压紧件22高度的调节机构4,以用于适配并整平不同规格的物料袋。
37.调节机构4包括呈框状结构的连接件41和用于调节连接件41高度的调节件42,压紧辊221转动连接于连接件41的内侧,以使得在需要调节压紧件22高度时,只需通过调节件42调节连接件41的高度即可。
38.调节件42包括多个转动连接于连接件41的调节杆421和用于控制调节杆421转动
的控制杆422,控制杆422呈竖向设置且其穿设并转动连接于支架31的安装盖。调节杆421的一端转动连接于连接件41,调节杆421的另一端转动连接于支架31的安装盖,并且多个调节杆421分为两组,两组的调节杆421分别设置于连接件41沿传送带21传输方向的两侧,以用于平衡连接件41的受力。
39.参照图3,在调节杆421和控制杆422之间还设置有用于传递控制杆422转动时的动力至调节杆421的传动件43。传动件43包括多个从动蜗轮431和啮合于从动蜗轮431的传动蜗杆432,多个调节杆421还分为多组且同组包含有两个调节杆421。同组的两个调节杆421沿垂直于调节杆421和传送带21的传输方向分布,并且同组的两个调节杆421分别设置于连接件41沿传送带21传输方向的两侧,同组的两个调节杆421转动连接于支架31的安装盖的端部固定有传动杆423,多个传动杆423分别穿设并固定于多个从动蜗轮431且两者同中心轴线设置,以使得从动蜗轮431通过传动杆423固定于调节杆421,从而在传动蜗杆432转动时,能够同时带动多个从动蜗轮431转动,并能够通过传动杆423带动多个传动杆423转动,使得调节杆421转动并调整连接件41相对传送带21上带面的间距,适应不同规格的物料袋。
40.同时为了控制杆422能够带动传动蜗杆432转动,传动蜗杆432固定连接有从动锥齿轮433,控制杆422同轴固定连接有啮合于从动锥齿轮433的主动锥齿轮434,并且从动蜗轮431与调节杆421的转动平面均平行于传送带21的传送带21的传输方向,从动蜗轮431与调节杆421的转动平面均呈竖向设置。此外,控制杆422的顶部固定连接有用于辅助对其做转动的转盘424。
41.参照图3,在控制杆422转动时,能够通过与其固定的主动锥齿轮434带动从动锥齿轮433转动,从而使得控制杆422转动时能够带动传动蜗杆432转动,并能够通过从动蜗轮431啮合于传动蜗杆432的单向传动,限制调节杆421的转动。
42.参照图4,此时由于在传送带21传送物料袋时,会压平物料袋,此时物料袋的侧部会膨胀,并且物料袋在被传送带21传送时,不同物料袋的在传送带21的位置不同,为了使得物料袋被整平后的位置相对较为统一和更加平整,机架3设置有多个限制物料袋的膨胀以及滑落传送带21的限制件5,还对物料袋做导引。
43.多个限制件5分为两组且两组的多个限制件5分别设置于传送带21传输方向的两侧,以用于限制物料袋的位置和进一步做整平。
44.限制件5包括平行于传送带21传输方向设置的限制板51、至少一个固定于限制板51远离传送带21带面一侧的连接杆52和至少一个控制螺母53,不同的控制螺母53分别外套并螺纹连接于不同的连接杆52。连接杆52垂直于传送带21的传输方向,连接杆52呈水平设置或呈倾斜设置,控制螺母53转动连接于机架3,限制板51沿传送带21传输方向的两端分别朝向远离传送带21的方向弯折,以用于对物料袋做导引,减小划破物料袋的可能性的同时,限制物料袋的位置,并通过传送带21两侧的限制板51将不同物料袋导引至传送带21的中部位置或其他相对较为固定的位置,以优化使用效果,并能够在传送不同规格的物料袋时,能够通过转动控制螺母53使得连接杆52轴向位移,从而通过调整传送带21两侧的限制板51之间的间距而适应不同规格的物料袋。
45.参照图4,机架3设置有多个连接板54,多个连接板54分为两组且两组的连接板54分别设置于传送带21的两侧。连接板54开设有长条形孔541,控制螺母53开设有环槽531,长条形孔541的开口边沿卡设于环槽531内,以使得控制螺母53通过长条形孔541的开口边沿
卡设于环槽531而转动连接于连接板54,并能够通过控制螺母53沿长条形孔541滑移而做适应性的位置调整,进一步优化使用效果。
46.本申请实施例一种码垛装置的实施原理为:在对物料袋做码垛时,物料袋先放置于传送带21做传输,此时设置于传送带21两侧的限制板51能够限制物料袋滑落的同时还能够将物料袋限制于传送带21相对较为固定的位置,并能够通过压紧带222和传送带21的带面将物料袋的上下带面压平,在对物料袋压平的过程中,位于压紧件22和传送带21之间的限制板51还能够限制物料袋的横向膨胀,以使得被传出的物料袋能够相对更加平整,进一步优化码垛机器人1通过吸盘吸附物料袋时的稳定性。
47.以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1