往复运动的旋转刀封装置的制作方法
1.本实用新型涉及包装机技术领域,更具体地说涉及一种往复运动的旋转刀封装置。
背景技术:
2.随着科技的发展和时代的进步,自动化的包装技术越来越趋于完善,现有的包装机的种类繁多,按封口形式区分,可分为背封式、三边封、四边封和三角封等等;按产品形态区分,可分为卧式包装机,立式包装机,真空包装机和封口机等等。
3.横封封合机构是包装机的重要组成部分,它可以将包装物外面的包装膜进行加热切割和封口。目前包装机的横封封合机构大多以圆周回转式运动为主,利用上下高温封合切刀相对旋转的上下啮合来完成对包装膜的封装;这种回转式横封法其特点是结构简单,可实现高速运转。
4.但是,现有技术中,由于回转式横封包装方法,横封封合时间较短,多位瞬间密封,为确保包装膜的封口密封效果良好,则需要将横封时间控制在一定范围内,即横封密封器与包装膜接触的时间要确保可以将包装膜进行良好的密封和切断。
5.假设包装膜封口的最低接触时间要求为t,则在t时间内,需回转式横封机构的密封器从开始接触包装膜、加热、切断、离开包装膜这个过程在t时间内完成,即可确保封口的密封性。而包装膜与密封器接触的范围就在包装膜与密封器相切的这段距离l里,若密封器旋转速度越快,则通过该距离l的时间t越小,因此,当封口时间t收到限定时,密封器的旋转速度也就会收到限定。
6.包装膜与密封器接触的这段距离l里,为确保封口质量,是必须要求包装膜的输送速率与密封器的线速度相同,则密封器与包装膜相对静止,这就导致了密封器的旋转时与包装膜接触的线速度决定了包装膜的输送速度,也就决定了包装速度。因此,现有的回转式横封包装方法的最快包装速率已经确定了,在不影响包装封口效果的情况下,包装速率无法提高。
技术实现要素:
7.为了克服上述现有技术中存在的缺陷和不足,本实用新型提供了一种往复运动的旋转刀封装置,本实用新型的发明目的在于提高现有技术中回转式横封机构的封口效率,在确保封口效果的情况下,提高其运行速度,进而提高包装效率。本实用新型的往复运动的旋转刀封装置包括回转式刀封机构和往复驱动机构,往复驱动机构与回转式刀封机构相连,带动回转式刀封机构沿包装膜走膜方向往复运动。本实用新型的往复运动的旋转刀封机构的走膜线速度为回转式刀封机构的旋转速度和回转式刀封机构沿走膜方向移动速度的速度之和,本实用新型这样的设置可以打破现有回转式封口机构的走膜速度的上限,可以在确保封口效果的情况下,提高走膜速度,进而提高整体包装速度。
8.为了解决上述现有技术中存在的问题,本实用新型是通过下述技术方案实现的:
9.往复运动的旋转刀封装置,包括回转式刀封机构,所述回转式刀封机构包括第一封口轴、第二封口轴、封口座、封口驱动电机、传动齿轮组和密封器组件,所述第一封口轴和第二封口轴对称布设在封口座上,封口驱动电机与第一封口轴相接并带动第一封口轴转动,第一封口轴通过传动齿轮组带动第二封口轴转动;所述密封组件包括第一密封器和第二密封器,第一密封器安装在第一封口轴上,第二密封器安装在第二封口轴上,第一密封器和第二密封器设有相互配合的密封面;其特征在于:旋转刀封装置还包括往复驱动机构,所述往复驱动机构包括往复驱动电机、安装座、导向轴和传动组件,所述往复驱动电机固定安装在安装座上,导向轴沿走膜方向布置在安装座上,所述封口座上设置有导向轴配合滑动的导向滑块,导向滑块连接在导向轴上,往复驱动电机通过传动组件带动封口座沿导向轴往复滑动。
10.所述传动齿轮组包括第一传动齿轮和第二传动齿轮,第一传动齿轮固定在第一封口轴相对连接封口驱动电机的另一端的端部,第二传动齿轮安装在第二封口轴的端部,且第一传动齿轮与第二传动齿轮啮合。
11.所述回转式刀封机构包括有两组密封器组件,当其中一组密封器组件的两个密封器贴合在一起时,另一组密封器组件的两个密封器分别位于两极限位置。
12.所述传动组件包括往复驱动摇臂和连杆,往复驱动摇臂的一端与往复驱动电机的输出轴固定连接,往复驱动摇臂的另一端与连杆的一端铰接,连杆的另一端铰接在封口座上。
13.与现有技术相比,本实用新型所带来的有益的技术效果表现在:
14.1、本实用新型的包括回转式刀封机构和往复驱动机构,往复驱动机构与回转式刀封机构相连,带动回转式刀封机构沿包装膜走膜方向往复运动。本实用新型的往复运动的旋转刀封机构的走膜线速度为回转式刀封机构的旋转速度和回转式刀封机构沿走膜方向移动速度的速度之和,本实用新型这样的设置可以打破现有回转式封口机构的走膜速度的上限,可以在确保封口效果的情况下,提高走膜速度,进而提高整体包装速度。
15.2、本实用新型的往复运动的旋转刀封机构,走膜线速度v=刀封移动速度v2+刀封旋转速度v1;刀封封合的旋转速度在封合时间内要和走膜的线速度同步才能达到封合的最佳效果;常规的回转式刀封机构只有刀封旋转速度v1,而本申请的往复运动的旋转刀封装置,在相同的封合时间内,增加刀封的水平移动速度v2,从而走膜的线速度需增加相应的水平移动速度实现封合。即一个单位的封合时间内,走膜需要提高的速度就是包装机整体提高的速度。
16.3、本实用新型中,传动齿轮组啮合的方式,确保了第一封口轴和第二封口轴的同步运动,使得第一密封器和第二密封器在旋转时完成封合。本申请设置两组密封器组件,可以进一步提高包装效率。
17.4、本实用新型的往复式驱动机构的传动组件、导向轴,结构简单,传动平稳,确保回转式刀封机构的平稳往复移动。
附图说明
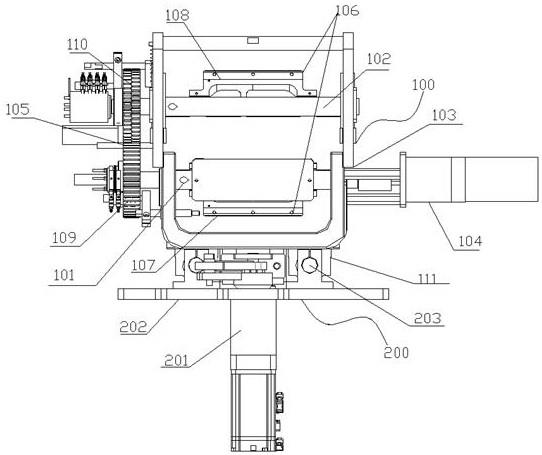
18.图1为本实用新型往复运动的旋转刀封装置的第一种实施方式的结构示意图图;
19.图2为本实用新型往复运动的旋转刀封装置一视角的结构图;
20.图3为本实用新型往复运动的旋转刀封装置又一视角的结构图;
21.图4为本实用新型往复运动的旋转刀封装置的速度分析图;
22.图5为本实用新型往复式运动的旋转刀封装置的另一种实施方式的主视图;
23.附图标记:100、回转式刀封机构, 101、第一封口轴,102、第二封口轴,103、封口座,104、封口驱动电机,105、传动齿轮组,106、密封器组件,107、第一密封器,108、第二密封器,109、第一传动齿轮,110、第二传动齿轮,111、导向滑块;200、往复驱动机构,201、往复驱动电机,202、安装座,203、导向轴,204、往复驱动摇臂,205、连杆。
具体实施方式
24.下面结合说明书附图对本实用信息的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本实用新型,但不构成对本实用新型的限定。此外,下面所描述的本实用新型各个实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。
25.图1
‑
图3出示了本实用新型往复运动的旋转刀封装置第一种实施方式的结构,如图1所示,包括回转式刀封机构100,所述回转式刀封机构100包括第一封口轴101、第二封口轴102、封口座103、封口驱动电机104、传动齿轮组105和密封器组件106,所述第一封口轴101和第二封口轴102对称布设在封口座103上,封口驱动电机104与第一封口轴101相接并带动第一封口轴101转动,第一封口轴101通过传动齿轮组105带动第二封口轴102转动;所述密封组件包括第一密封器107和第二密封器108,第一密封器107安装在第一封口轴101上,第二密封器108安装在第二封口轴102上,第一密封器107和第二密封器108设有相互配合的密封面。
26.在本实施方式中,密封器组件106的数量为一个,即与第一封口轴101配合运动的第一密封器107设置为一个,与第二封口轴102配合运动的第二密封器108设置为一个,这种一组密封器组件106形式为单刀形式。如图1所示,当第二密封器108处于最高点位置时,第一密封器107位于其正下方的最低点位置,保证了两个密封器同步运动时,可在旋转时完成封合。
27.如图1所示,若将图1看作是主视图,则该设备可适用于枕式包装机(卧式包装机),若将图1看作是俯视图,则该设置可适用于立式包装机。
28.如图2和图3所示,旋转刀封装置还包括往复驱动机构200,所述往复驱动机构200包括往复驱动电机201、安装座202、导向轴203和传动组件,所述往复驱动电机201固定安装在安装座202上,导向轴203沿走膜方向布置在安装座202上,所述封口座103上设置有导向轴203配合滑动的导向滑块111,导向滑块111连接在导向轴203上,往复驱动电机201通过传动组件带动封口座103沿导向轴203往复滑动。导向轴203设置为两根,确保封口座103运行稳定。
29.更进一步地,所述传动齿轮组105包括第一传动齿轮109和第二传动齿轮110,第一传动齿轮109固定在第一封口轴101相对连接封口驱动电机104的另一端的端部,第二传动齿轮110安装在第二封口轴102的端部,且第一传动齿轮109与第二传动齿轮110啮合。第一封口轴101作为主动轴与封口驱动电机104相连,第一传动齿轮109作为主动轮,第二传动齿轮110作为从动轮与第一传动齿轮109相啮合,第一封口轴101转动带动第二封口轴102转
动。
30.所述传动组件包括往复驱动摇臂204和连杆205,往复驱动摇臂204的一端与往复驱动电机201的输出轴固定连接,往复驱动摇臂204的另一端与连杆205的一端铰接,连杆205的另一端铰接在封口座103上。
31.如图5所示,示出了本实用新型往复运动的旋转刀封装置另一种实施方式的结构,与第一种实施方式不同的是,密封器组件106为两组,即与第一封口轴101配合运动的第一密封器107设置为两个,与第二封口轴102配合运动的第二密封器108设置为两个,这种两组密封器组件106形式为双刀形式。如图5所示,当一组密封器组件106的第一密封器107和第二密封器108配合密封面在一起时,第一封口轴101上的两个第一密封器107和第二封口轴102上的两个第二密封器108位于同一平面内。该设备若应用在枕式包装机(卧式包装机)则位于同一竖直面内;该设备若用于立式包装机中,则位于同一水平面内。
32.更进一步地,如图4所示,图4示出了本实施方式中往复运动的旋转刀封机构的走膜线速度v=刀封移动速度v2+刀封旋转速度v1;刀封封合的旋转速度在封合时间内要和走膜的线速度同步才能达到封合的最佳效果;常规的回转式刀封机构100只有刀封旋转速度v1,而本申请的往复运动的旋转刀封装置,在相同的封合时间内,增加刀封的水平移动速度v2,从而走膜的线速度需增加相应的水平移动速度实现封合。即一个单位的封合时间内,走膜需要提高的速度就是包装机整体提高的速度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1