一种便于装卸的脚手架运输装置的制作方法
1.本实用新型涉及脚手架技术领域,具体为一种便于装卸的脚手架运输装置。
背景技术:
2.脚手架是为了保证各施工过程顺利进行而搭设的工作平台,一般脚手架由多个钢管通过插接装置拼装而成,在搭建和拆除的前后,都需要对脚手架进行搬运,如公告号为cn208915220u的实用新型专利中,公开了一种建筑脚手架钢管收集运输装置,包括收集架板、手柄、第一夹板、第二夹板、第一拉环、第二拉环和弹性复位件;收集架板包括第一侧板、第二侧板和底板;第一侧板和第二侧板分别垂直连接在底板相对的两侧,构成钢管存放腔体;底板安装万向轮;第一夹板设置在存放腔体的中部位置;第二夹板设置在存放腔体的中部位置;弹性复位件用于使第一夹板和第二夹板复位至存放腔体的中部位置,然而,该装置在使用时,脚手架在装卸时需要人工搬运,大大提升了工人的劳动强度,且在搬运时易将脚手架的拼接装置碰撞变形。
技术实现要素:
3.针对现有技术的不足,本实用新型提供了一种便于装卸的脚手架运输装置,解决了现有装置装卸脚手架时需要人工搬运的技术问题。
4.为实现以上目的,本实用新型通过以下技术方案予以实现:一种便于装卸的脚手架运输装置,包括车厢上固接有货架,所述货架包括与所述车厢固接的固定板,所述固定板上固接有一对挡板,所述固定板上还固接有若干对托杆固定块,若干对所述托杆固定块均活动连接有一对托杆,每对所述托杆下壁均固接有横杆,所述车厢上还固接有一对侧挡板,所述横杆两端抵紧于一对所述侧挡板内壁,所述货架一端设有传送装置。
5.优选的,所述传送装置包括位于货架一端的平台,所述平台上壁固接有一对转轴固定块,一对所述转轴固定块上活动连接有第一转轴,所述第一转轴两侧固接有一对升降臂,一对所述升降臂另一端活动连接有第二转轴,所述第一转轴与所述第二转轴上套装有一对传送带,一对所述传送带上均固接有若干托架,一对所述升降臂中间处还活动连接有第三转轴,所述平台上固接有一对伸缩杆固定块,一对所述伸缩杆固定块之间活动连接有电动伸缩杆,所述电动伸缩杆伸缩端固接于所述第三转轴。
6.优选的,所述平台上壁固接有电机,所述第一转轴上固接有从动轮,所述电机输出端通过链条连通所述从动轮,所述平台上壁固接有电瓶,所述电瓶通过导线连通所述电机和所述电动伸缩杆。
7.优选的,所述第二转轴上还活动连接有一对延伸托架,且一对所述延伸托架套装于所述第二转轴上。
8.优选的,所述平台下方转动连接有两对车轮。
9.优选的,一对所述转轴固定块均固接有脚手架放置板。
10.优选的,一对所述侧挡板上均固接有延伸杆,所述延伸杆下方固接有手拉葫芦,所
述手拉葫芦伸缩端固接有连接杆,且所述连接杆通过转轴连接于若干所述横杆两端。
11.优选的,若干所述托杆一端均开设有通孔,若干所述托杆通孔内插装有档杆。
12.有益效果
13.本实用新型提供了一种便于装卸的脚手架运输装置,具备以下有益效果:
14.1、装卸脚手架时通过传送装置装卸脚手架,减轻了工人的劳动强度,操作简单,使用方便。
15.2、通过设有的货架可以有序的摆放脚手架,减少了脚手架在装卸时产生碰撞变形。
附图说明
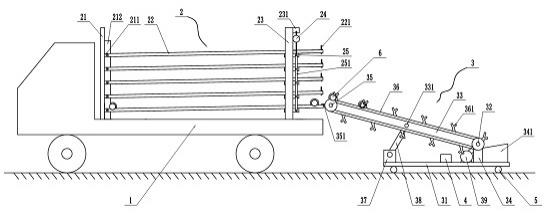
16.图1为本实用新型的整体结构示意图。
17.图2为本实用新型的传送装置俯视示意图。
18.图3为本实用新型的货架侧视示意图。
19.图4为本实用新型在卸脚手架时托架工作方式示意图。
20.图中:1
‑
车厢;2
‑
货架;21
‑
固定板;211
‑
托杆固定块;212
‑
挡板;22
‑
托杆;221
‑
档杆;23
‑
侧挡板;231
‑
延伸杆;24
‑
手拉葫芦;25
‑
横杆;251
‑
连接杆;3
‑
传送装置;31
‑
平台;32
‑
第一转轴;321
‑
从动轮;322
‑
链条;33
‑
升降臂;331
‑
第三转轴;34
‑
转轴固定块;341
‑
脚手架放置板;35
‑
第二转轴;351
‑
延伸托架;36
‑
传送带;361
‑
托架;37
‑
伸缩杆固定块;38
‑
电动伸缩杆;39
‑
电机;4
‑
电瓶;5
‑
车轮;6
‑
脚手架。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.请参阅图1
‑
4,本实用新型提供一种技术方案:一种便于装卸的脚手架运输装置,包括车厢1上固接有货架2,所述货架2包括与所述车厢1固接的固定板21,所述固定板21上固接有一对挡板212,所述固定板21上还固接有若干对托杆固定块211,若干对所述托杆固定块211均活动连接有一对托杆22,每对所述托杆22下壁均固接有横杆25,所述车厢1上还固接有一对侧挡板23,所述横杆25两端抵紧于一对所述侧挡板23内壁,所述货架2一端设有传送装置3;所述传送装置3包括位于货架2一端的平台31,所述平台31上壁固接有一对转轴固定块34,一对所述转轴固定块34上活动连接有第一转轴32,所述第一转轴32两侧固接有一对升降臂33,一对所述升降臂33另一端活动连接有第二转轴35,所述第一转轴32与所述第二转轴35上套装有一对传送带36,一对所述传送带36上均固接有若干托架361,一对所述升降臂33中间处还活动连接有第三转轴331,所述平台31上固接有一对伸缩杆固定块37,一对所述伸缩杆固定块37之间活动连接有电动伸缩杆38,所述电动伸缩杆38伸缩端固接于所述第三转轴331;所述平台31上壁固接有电机39,所述第一转轴32上固接有从动轮321,所述电机39输出端通过链条322连通所述从动轮321,所述平台31上壁固接有电瓶4,所述电瓶4通过导线连通所述电机39和所述电动伸缩杆38;所述第二转轴35上还活动连接有一对延伸
托架351,且一对所述延伸托架351套装于所述第二转轴35上;所述平台31下方转动连接有两对车轮5;一对所述转轴固定块34均固接有脚手架放置板341;一对所述侧挡板23上均固接有延伸杆231,所述延伸杆231下方固接有手拉葫芦24,所述手拉葫芦24伸缩端固接有连接杆251,且所述连接杆251通过转轴连接于若干所述横杆25两端;若干所述托杆22一端均开设有通孔,若干所述托杆22通孔内插装有档杆221。
23.通过本领域人员,将本案中所有电气件与其适配的电源通过导线进行连接,并且应该根据实际情况,选择合适的控制器,以满足控制需求,具体连接以及控制顺序,应参考下述工作原理中,各电气件之间先后工作顺序完成电性连接,其详细连接手段,为本领域公知技术,下述主要介绍工作原理以及过程,不在对电气控制做说明。
24.实施例:在装脚手架6用时,通过拉动两侧的手拉葫芦24,使若干对托杆22一端上升,此时托杆22为向内倾斜,将若干对托杆22上的档杆22全部拔出,将传送装置3移动至货架2后方,通过电动伸缩杆38推动升降壁33,使第二转轴35的轴线对齐一对托杆22上壁,转动伸托架351搭使其在一对托杆22上壁,启动电机39,通过链条322带动第一转轴32转动,通过第一转轴32转动使传送带36转动,将脚手架6放置在一对脚手架放置板341上壁,通过脚手架放置板341倾斜的上壁使脚手架6滚动至传送带36一端,通过传送带36上的托杆361将脚手架6托起,当脚手架6移动至传送带36另一端时利用重力使脚手架6降落至延伸托架351上,通过倾斜的延伸托架351使脚手架6滚动至托杆22上,然后滚动至托杆22另一端,当这层托杆22装满时,停止电机39,通过电动伸缩杆38推动升降壁33,使第二转轴35对齐至上一层托杆22,启动电机39开始在这一层装入脚手架6,所有托杆22全部装满后将档杆221全部插回托杆22内,防止运输时脚手架6滚动出来,在卸脚手架6时,通过拉动两侧的手拉葫芦24,使若干对托杆22一端下降,此时托杆22为向外倾斜,将传送装置3移动至货架2后方,通过电动伸缩杆38推动升降壁33,使第二转轴35轴线对齐一对托杆22上壁,将这一层的档杆221拔出,此时因为向外倾斜的托杆22使脚手架6滚动至传送带36一端,启动电机39并使电机39反转,如图4所示,通过传送带36上的托架361可以将脚手架6托起,经过传送带36将脚手架6传送至脚手架放置板上,达到卸脚手架6的目的。
25.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下。由语句“包括一个......限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素”。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1