激光导航装置及激光堆垛叉车AGV的制作方法
激光导航装置及激光堆垛叉车agv
技术领域
1.本实用新型涉及自动导航领域,具体涉及激光导航装置及激光堆垛叉车agv。
背景技术:
2.激光堆垛叉车agv靠叉车agv上部的激光导航仪和固定在仓库等场景的反光定位柱来实现对agv的导航。现有的应用于激光堆垛叉车agv的激光导航仪多为固定高度,且工作场地的反光定位柱的高度固定,使激光堆垛叉车agv在具体应用时适用的场景单一,一种型号的agv只能对应一种工作场景,做不到适用多场景。并且,由于各个仓库之间的门或电梯有高度限制,激光导航仪的高度如果高于该限制条件,则会阻碍agv在仓库1和仓库2 之间行走。
3.现有的应用于激光堆垛叉车agv上的激光导航装置需进一步优化。
技术实现要素:
4.本实用新型的第一个发明目的在于提供一种激光导航装置,本实用新型的激光导航装置的高度可调,以便适应不同使用场景。
5.为实现以上发明目的,本实用新型采取以下技术方案:
6.激光导航装置,包括连接架、升降机构、安装平台和激光导航仪,所述连接架用于固定在agv上,所述升降机构设于连接架上,所述安装平台设在升降机构的上侧,所述激光导航仪设在安装平台上,所述升降机构可驱动安装平台相对连接架纵向移动以带动激光导航仪上升或下降。
7.本实用新型的激光导航装置通过设置升降机构实现激光导航仪的上升或下降,从而使 agv可根据所在场地的反光定位柱高度调整激光导航仪的高度,或在进出仓库时根据门或电梯的高度调整激光导航仪的高度。与现有技术相比,本实用新型的激光导航装置应用于激光堆垛叉车agv上,可使agv适用不同的场景,且行走方便。
8.优选的,还包括避障传感器,所述避障传感器设于安装平台上并与agv通信连接。本方案的避障传感器用于检测agv的行进方向是否存在障碍并生成障碍信号,当agv的高度大于门体高度,或agv与反光定位柱之间存在障碍物,或agv的前进方向存在障碍物,避障传感器生成避障信号并发送给agv。
9.优选的,所述避障传感器设有两个,并布设于激光导航装置的左、右侧。
10.优选的,所述升降机构包括升降驱动组件,所述升降驱动组件包括电动气缸和编码器,所述电动气缸竖向地设在连接架上,所述电动气缸的活动端与安装平台的下侧连接以驱动安装平台上升或下降,所述编码器设在电动气缸上,以用于监测安装平台的上升或下降的距离数据。本方案中,agv根据避障传感器的反馈获得障碍物的高度位置,通过编码器的反馈获得激光导航仪的高度位置,从而控制电动气缸工作。
11.优选的,所述电动气缸与安装平台的底部中间连接,所述升降机构还包括两组升降导向组件,包括导向杆和连接轴承,所述连接轴承固定在连接架上,所述导向杆与连接轴
承滑动连接,两个导向杆的上侧分别与安装平台的下部其中一侧连接。本方案的升降导向组件具有导向作用,可使升降平台在上升或下降过程中保持平衡。
12.优选的,还包括第一位置传感器,所述第一位置传感器设在连接架的上部并位于所在升降导向组件的一侧,所述第一位置传感器实时感应导向杆并向agv发送感应信号。本方案的第一位置传感器用于检测导向杆的上升高度是否超出最高警戒高度线,当导向杆的底部高度超出第一位置传感器的感应范围,其无法检测到导向杆,则agv以此判断上升高度已超出最高警戒高度线,从而控制电动气缸停止继续向上顶推。需说明的是,最高警戒高度线为虚拟线,第一位置传感器的高度与该虚拟线平齐。
13.优选的,还包括第二位置传感器,所述第二位置传感器设置连接架的下部并位于所在升降导向组件的一侧,所述第二位置传感器实时感应导向杆并向agv发送感应信号。本方案的第二位置传感器用于检测导向杆的下降高度是否低于最低警戒高度线,当导向杆的底部高度超出第二位置传感器的感应范围,其无法检测到导向杆,则agv以此判断下降高度未低于最低警戒高度线,反之,判定其下降高度已低于最低警戒高度线,从而控制电动气缸停止继续向下缩进。需说明的是最低警戒高度线为虚拟线,第二位置传感器的高度与该虚拟线平齐。
14.优选的,上述连接架包括纵向设置地安装板以及设于安装板左、右侧的连接结构,所述连接结构用于与agv上的连接结构连接,所述升降机构设于安装板的前端面上。
15.优选的,还包括壳体,所述壳体呈后侧敞口的罩状,所述壳体罩设在安装板的前侧,所述壳体的上侧对应所述升降机构设有过孔,所述安装平台位于壳体的上方,所述升降机构通过所述过孔与安装平台连接。
16.本实用新型的第二个发明目的在于提供一种激光堆垛叉车agv,包括agv本体以及上述方案的激光导航装置,激光导航装置设置在agv本体的上侧。与现有技术相比,本实用新型的激光堆垛叉车agv由于应用了上述的方案,因此,具有上述方案的所有优点。
附图说明
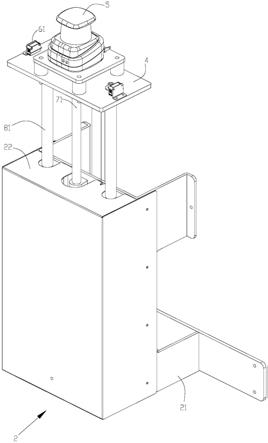
17.图1是激光导航装置的结构示意图1;
18.图2是激光导航装置的结构示意图2;
19.图3是激光导航装置的结构示意图3;
20.图4是激光堆垛叉车agv的结构示意图。
21.标号说明:
22.agv本体1、激光导航装置2、连接架21、壳体22、安装板23、连接结构24、连接耳25、固定板26、升降机构3、安装平台4、激光导航仪5、避障传感器61、第一位置传感器 62、第二位置传感器63、升降驱动组件、电动气缸71、编码器72、升降导向组件8、导向杆81、连接轴承82。
具体实施方式
23.以下根据附图,进一步的说明本实用新型的技术方案:
24.在本实用新型的描述中,需要理解的是,所述“上”、“下”、“左”、“右”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描
述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
25.如图1-3所示,本实用新型公开了一种激光导航装置2,包括连接架21、升降机构3、安装平台4和激光导航仪5,所述连接架21用于固定在agv上,所述升降机构3设于连接架21上,所述安装平台4设在升降机构3的上侧,所述激光导航仪5设在安装平台4上,所述升降机构3可驱动安装平台4相对连接架21纵向移动以带动激光导航仪5上升或下降。
26.在一实施例中,激光导航装置2还包括避障传感器61,所述避障传感器61设于安装平台4上并与agv通信连接。本实施例的避障传感器61用于检测agv的前方是否存在障碍并生成障碍信号,当agv的高度大于门体高度或agv前方存在障碍物,避障传感器61生成避障信号并发送给agv。
27.在一实施例中,上述避障传感器61设有两个,并布设于激光导航装置2的左、右侧。
28.在一实施例中,上述升降机构3包括升降驱动组件,所述升降驱动组件包括电动气缸 71和编码器72,所述电动气缸71竖向地设在连接架21上,所述电动气缸的活动端与安装平台4的下侧连接以驱动安装平台4上升或下降,所述编码器72设在电动气缸71上,以用于监测安装平台4的上升或下降的距离数据。本实施例中,agv根据避障传感器61的反馈获得障碍物的高度位置,通过编码器72获得激光导航仪5的高度位置,从而控制电动气缸71工作。
29.在一实施例中,上述电动气缸71与安装平台4的底部中间连接,所述升降机构3还包括两组升降导向组件8,包括导向杆81和连接轴承82,所述连接轴承82固定在连接架21 上,所述导向杆81与连接轴承82滑动连接,两个导向杆81的上侧分别与安装平台4的下部其中一侧连接。本实施例的升降导向组件8具有导向作用,可使升降平台在上升或下降过程中保持平衡。
30.在一实施例中,激光导航装置2还包括第一位置传感器62,所述第一位置传感器62设在连接架21的上部并位于所在升降导向组件8的一侧,所述第一位置传感器62实时感应导向杆81并向agv发送感应信号。本实施例的第一位置传感器62用于检测导向杆81的上升高度是否超出最高警戒高度线,当导向杆81的底部高度超出第一位置传感器62的感应范围,其无法检测到导向杆81,则agv以此判断上升高度已超出最高警戒高度线,从而控制电动气缸71停止继续向上顶推。
31.在一实施例中,激光导航装置2还包括第二位置传感器63,所述第二位置传感器63设置连接架21的下部并位于所在升降导向组件8的一侧,所述第二位置传感器63实时感应导向杆81并向agv发送感应信号。本实施例的第二位置传感器63用于检测导向杆81的下降高度是否低于最低警戒高度线,当导向杆81的底部高度超出第二位置传感器63的感应范围,其无法检测到导向杆81,则agv以此判断下降高度未低于最低警戒高度线,反之,判定其下降高度已低于最低警戒高度线,从而控制电动气缸71停止继续向下缩进。
32.在一实施例中,上述连接架21包括纵向设置地安装板23以及设于安装板23左、右侧的连接结构24,所述连接结构24用于与agv上的连接结构24连接,所述升降机构3设于安装板23的前端面上。
33.上述连接结构24包括设连接耳25,所述连接耳25自安装板的两侧向后延伸,所述连接耳25设于安装板23的后侧,为加强连接架的强度,两个连接耳25之间通过固定板26 连
接。
34.在一实施例中,激光导航装置2还包括壳体22,所述壳体22呈后侧敞口的罩状,所述壳体22罩设在安装板23的前侧,所述壳体22的上侧对应所述升降机构3设有过孔,所述安装平台4位于壳体22的上方,所述升降机构3通过所述过孔与安装平台4连接。
35.本实用新型的激光导航装置2通过设置升降机构3实现激光导航仪5的上升或下降,从而使agv可根据所在场地的反光定位柱高度调整激光导航仪5的高度,或在进出仓库时根据门或电梯的高度调整激光导航仪5的高度。与现有技术相比,本实用新型的激光导航装置2应用于激光堆垛叉车agv上,可使agv适用不同的场景,且行走方便。
36.如图4所示,本实用新型还公开了一种激光堆垛叉车agv,包括agv本体以及上述方案的激光导航装置2,激光导航装置2设置在agv本体1的上侧。与现有技术相比,本实用新型的激光堆垛叉车agv由于应用了上述的方案,因此,具有上述方案的所有优点。
37.根据上述说明书的揭示和教导,本实用新型所属领域的技术人员还可以对上述实施方式进行变更和修改。因此,本实用新型并不局限于上面揭示和描述的具体实施方式,对本实用新型的一些修改和变更也应当落入本实用新型的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本实用新型构成任何限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1