一种洁具搬运装置的制作方法
1.本实用新型涉及陶瓷洁具生产技术领域,具体而言,涉及一种洁具搬运装置。
背景技术:
2.陶瓷洁具是由高温加热,从而使产品达到全瓷化,具有耐磨、不吸水的优点。陶瓷洁具从烧制炉中烧制完成一般需要搬运至其他车间或工位进行下一道工序的加工。
3.现有的洁具搬运系统一般包括以下的功能模块:从炉中运送出洁具的轨道车、连接下一道生产线的输送带、人工操作的桥式起重机。搬运过程大致包括:首先由人操作桥式起重机到达轨道车附近合适位置,接着人工手动操作夹爪夹取洁具,然后操作桥式起重机至输送带上方,最后按照一定的位姿将洁具放置在输送带上,手动松开夹爪,开始下一次夹取。
4.现有的洁具搬运系统具有搬运生产线的基本要求,能够实现洁具搬运的任务。
5.然而,现有的洁具搬运系统主要存在以下技术缺陷:
6.实际工业生产中,洁具的产量巨大,人工搬运效率低下,人工成本高,生产环境恶劣,以人工搬运为主要搬运方式的生产线越来越难以满足大批量多样化的生产需求。
技术实现要素:
7.本实用新型就是为了解决现有人工手动操作搬运陶瓷洁具效率低、人工成本高、难以满足大批量多样化生产需求的技术问题,提供了一种效率高、人工成本低、能够满足大批量多样化生产需求的洁具搬运装置。
8.本实用新型提供洁具搬运装置,包括码垛机器人和夹具,夹具包括夹具固定座、夹具连接座、夹具主框架、结构光相机、相机固定板、气缸、第一直线滑轨、第二直线滑轨、第一夹爪、第二夹爪、连接柱、连接叉、连接销、第一转动连杆和第二转动连杆,夹具连接座与夹具固定座固定连接,夹具主框架与夹具连接座固定连接,相机固定板与夹具主框架固定连接,结构光相机与相机固定板连接,气缸固定连接在夹具主框架上,连接柱与气缸的伸缩杆固定连接,第一直线滑轨、第二直线滑轨分别与夹具主框架的底面连接,第一夹爪的上端与第一直线滑轨的滑块连接,第二夹爪的上端与第二直线滑轨的滑块连接,连接叉与连接柱的下端固定连接,连接销与连接叉固定连接,第一转动连杆的一端与连接销转动连接,第二转动连杆的一端与连接销转动连接,第一转动连杆的另一端与第一夹爪的下端转动连接,第二转动连杆的下端与第二夹爪的下端转动连接;第一夹爪的下端设有第一夹取部,第二夹爪的下端设有第二夹取部;
9.夹具固定座与码垛机器人的末端固定连接。
10.优选地,洁具搬运装置还包括控制器。
11.本实用新型的有益效果是,自动化程度高,效率高,人工成本低、能够满足大批量多样化生产需求的。
12.本实用新型进一步的特征,将在以下具体实施方式的描述中,得以清楚地记载。
附图说明
13.图1是洁具搬运装置布置在输送带旁边,处于初始位置的侧视图;
14.图2是洁具搬运装置布置在输送带旁边,处于初始位置的俯视图;
15.图3是洁具搬运装置位于拍照位置的俯视图;
16.图4是洁具搬运装置位于拍照位置的正视图;
17.图5是洁具搬运装置移动至取料位置的侧视图;
18.图6是洁具搬运装置移动至取料位置的俯视图;
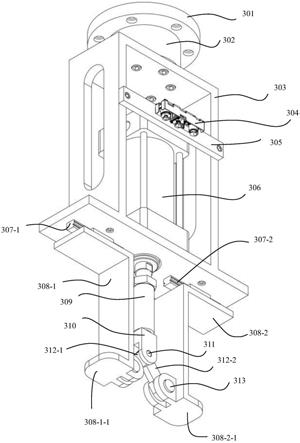
19.图7是夹具的结构示意图;
20.图8是夹具夹取陶瓷马桶的状态示意图;
21.图9是图8所示结构中,两个夹爪作用在陶瓷马桶上的示意图。
22.图中符号说明:
23.1.输送带,2.码垛机器人,2
‑
1.支架,3.夹具,301.夹具固定座,302.夹具连接座,303.夹具主框架,304.结构光相机,305.相机固定板,306.气缸,307
‑
1.第一直线滑轨,307
‑
2.第二直线滑轨,308
‑
1.第一夹爪、308
‑
2.第二夹爪,309.连接柱,310.连接叉,311.连接销,312
‑
1.第一转动连杆,312
‑
2.第二转动连杆,313.转动轴;4.轨道车,5.陶瓷马桶。
具体实施方式
24.以下参照附图,以具体实施例对本实用新型作进一步详细说明。
25.如图1
‑
7所示,生产车间布置了输送带1、轨道车4。
26.洁具搬运装置主要由码垛机器人2、夹具3以及控制器构成,夹具3包括夹具固定座301、夹具连接座302、夹具主框架303、结构光相机304、相机固定板305、气缸306、第一直线滑轨307
‑
1、第二直线滑轨307
‑
2、第一夹爪308
‑
1、第二夹爪308
‑
2、连接柱309、连接叉310、连接销311、第一转动连杆312
‑
1、第二转动连杆312
‑
2、转动轴313,夹具连接座302与夹具固定座301固定连接,夹具主框架303通过螺钉与夹具连接座302固定连接,相机固定板305通过螺钉与夹具主框架303固定连接,结构光相机304安装定位在相机固定板305上,气缸306固定安装在夹具主框架303上,连接柱309与气缸306的伸缩杆固定连接,第一直线滑轨307
‑
1、第二直线滑轨307
‑
2分别安装在夹具主框架303的底面,第一夹爪308
‑
1的上端与第一直线滑轨307
‑
1的滑块连接,第二夹爪308
‑
2的上端与第二直线滑轨307
‑
2的滑块连接,连接叉310与连接柱309的下端固定连接,连接销311与连接叉310固定连接,第一转动连杆312
‑
1的一端与连接销311转动连接,第二转动连杆312
‑
2的一端与连接销311转动连接,第一转动连杆312
‑
1的另一端与第一夹爪308
‑
1的下端通过转动轴转动连接,第二转动连杆312
‑
2的另一端与第二夹爪308
‑
2的下端通过转动轴313转动连接。第一夹爪308
‑
1的下端设有第一夹取部308
‑1‑
1,第二夹爪308
‑
2的下端设有第二夹取部308
‑2‑
1。
27.使用螺栓将夹具固定座301固定安装在码垛机器人2末端的支架上。
28.结构光相机304与控制器连接通讯,结构光相机304可以对轨道车4上的陶瓷马桶5拍照采集图像数据,控制机根据结构光相机304发送的图像数据对陶瓷马桶5进行识别。结构光相机是深度相机的一种类型。
29.码垛机器人2的底座安装定位在输送带1和轨道车4之间。
30.下面介绍洁具搬运装置的工作过程:
31.如图1和2所示,码垛机器人2位于初始位置,轨道车4从窑炉中运送出多个陶瓷马桶5;如图3和4所示,控制器控制码垛机器人2动作,使夹具3移动到陶瓷马桶5的正上方,控制器再指令结构光相机304对陶瓷马桶5进行拍照;然后,控制器指令码垛机器人2动作将夹具3向下位移一端距离,控制器再指令夹具3的气缸306动作,气缸306的伸缩杆伸出通过连接柱309带动连接叉310向下运动,连接叉310通过第一转动连杆312
‑
1、第二转动连杆312
‑
2推动第一夹爪308
‑
1、第二夹爪308
‑
2向外张开,如图8和9所示,第一夹爪308
‑
1的第一夹取部308
‑1‑
1伸入陶瓷马桶5的坐便部大圆孔的周边下方,第二夹爪308
‑
2的第二夹取部308
‑2‑
1伸入陶瓷马桶5的坐便部大圆孔的周边下方;然后码垛机器人2动作使夹具3整体向上运动,第一夹爪308
‑
1的第一夹取部308
‑1‑
1、第二夹爪308
‑
2的第二夹取部308
‑2‑
1作用在陶瓷马桶5的坐便部大圆孔的周边将陶瓷马桶5向上抬起,进一步码垛机器人2动作将陶瓷马桶5转运到输送带1上;然后,气缸306的伸缩杆缩回带动第一夹爪308
‑
1、第二夹爪308
‑
2收回靠拢,第一夹爪308
‑
1的第一夹取部308
‑1‑
1以及第二夹爪308
‑
2的第二夹取部308
‑2‑
1脱离陶瓷马桶5的坐便部大圆孔,整个夹具3向上移动,进而夹具3在码垛机器人2的带动下移动到轨道车4位置处进行下一个马桶的夹取搬运。
32.以上示意性的对本实用新型及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。所以,如果本领域的技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,采用其它形式的零件构型、驱动装置以及连接方式不经创造性的设计与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1