一种自动猫道平移装置的制作方法
1.本实用新型涉及石油钻探设备领域,具体涉及一种自动猫道平移装置。
背景技术:
2.在石油钻采的过程中,常常会有丛式井的情况,每个井位相隔几米,多个井位连续排列。当一个井位工作结束,石油钻机快速平移到下一个井位。但是钻机的外围设备,比如自动猫道不能实现自动平移。自动猫道很重并且很长,需要使用吊车和叉车来实现移动,操作不方便、耗时、成本高。
技术实现要素:
3.针对现有钻井现场自动猫道平移不便、耗时、成本高的问题,本实用新型提供了一种自动猫道平移装置,将本装置安装在自动猫道底座下端,借助本装置即可实现自动猫道水平方向的移动,本实用新型的技术目的是通过以下技术方案实现的:
4.一种猫道平移装置,用以猫道平移,其结构包括滑橇、伸缩杆,滑橇上端安装猫道底座,猫道底座放置在滑橇上端,伸缩杆一端活动连接在滑橇上端,伸缩杆另外一端活动连接在猫道底座侧壁,猫道底座和滑橇之间通过伸缩杆连接,伸缩杆可拆卸,伸缩杆对称设置在滑橇两侧。
5.进一步地,猫道底座下方设有至少两个滑橇。
6.进一步地,其结构还包括竖直设置的顶升装置,顶升装置对称设置在猫道底座两侧,顶升装置上端与猫道底座连接固定,顶升装置下端为自由端,顶升装置的下端可相对顶升装置的上端伸缩。
7.进一步地,滑橇上端对称设有两个或四个第一铰接座,猫道底座放置在对称设置的两个所述第一铰接座之间,猫道底座的侧面对应第一铰接座设有第三铰接座,伸缩杆两端分别设有铰接耳板,伸缩杆一端的铰接耳板通过销轴连接第一铰接座,伸缩杆另外一端的铰接耳板通过销轴连接第三铰接座,连接在所述第一铰接座和第三铰接座之间的伸缩杆平行于猫道底座长度方向。
8.进一步地,滑橇上端还设有第二铰接座,第二铰接座对称设置在猫道底座两侧,猫道底座的侧面对应第二铰接座设有第四铰接座,伸缩杆一端的铰接耳板通过轴销连接第二铰接座,伸缩杆另外一端的铰接耳板通过轴销连接第四铰接座,连接在所述第二铰接座和第四铰接座之间的伸缩杆与猫道的长度方向交叉。
9.进一步地,伸缩杆连接在第一铰接座和第三铰接座之间或者连接在第二铰接座和第四铰接座之间。
10.进一步地,猫道底座下端面还设有第一铰接座通过孔,第一铰接座通过孔设置在猫道底座两侧对称设置两个第一铰接座之间,连接在第二铰接座和第四铰接座之间的伸缩杆伸缩时第一铰接座可相对猫道底座进入第一铰接座通过孔。
11.进一步地,伸缩杆为油缸。
12.进一步地,顶升装置为油缸,油缸的下端还设有支撑脚,支撑脚呈凸台状。
13.相比现有技术,本实用新型的有益效果在于,通过本实用新型的自动猫道平移装置,可以实现猫道底座上端猫道的逐步移动,实现场地内猫道搬运,无需借助起重设备即可实现搬运;滑橇配合伸缩杆实现猫道的行走效果;通过第一铰接座配合第三铰接座、第二铰接座配合第四铰接座分别实现猫道在前后、左右方向的行走移动。
附图说明
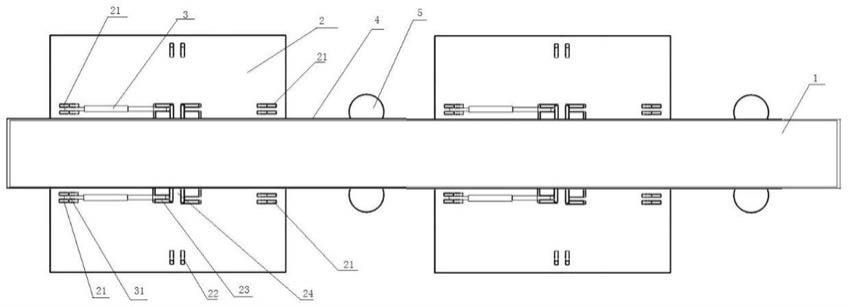
14.图1是本实用新型的猫道平移装置使用状态一示意图。
15.图2是本实用新型的猫道平移装置使用状态二示意图。
16.图3是本实用新型中的猫道平移装置局部结构图。
17.图4是本实用新型中的滑橇结构示意图。
18.图5是本实用新型中猫道平移装置前后平移流程图。
19.图6是本实用新型中猫道平移装置左右平移流程图。
20.图中,1、猫道;2、滑橇;3、伸缩杆;4、猫道底座;5、顶升装置;21、第一铰接座;22、第二铰接座;23、第三铰接座;24、第四铰接座;31、铰接耳板;41、第一铰接座通过孔;51、支撑脚。
具体实施方式
21.下面结合具体实施方式对本实用新型的技术方案进行进一步描述:
22.一种自动猫道平移装置,用于猫道1的移动,该装置包括滑橇2、伸缩杆3,滑橇2为钢板,将猫道底座4放置在滑橇上方,猫道1安装在猫道底座4上,一般一个猫道底座4下端至少需要安装两个滑橇2;其中在滑橇2上安装2个或4和第一铰接座21,2个第一铰接座21对称安装在位于猫道底座4两侧的滑橇2上;4个第一铰接座21也是对称安装在位于猫道底座4两侧的滑橇2上,如图1和图2和图4所示。
23.为了配合第一铰接座21安装伸缩杆3,在猫道底座4的两侧对称安装有第三铰接座23,伸缩杆3选用油缸,伸缩杆3的两端分别设有一个铰接耳板31,将伸缩杆3一端的铰接耳板31通过轴销安装在第一铰接座21上,将伸缩杆3另外一端的铰接耳板31通过轴销安装在第三铰接座23上;以具有四个第一铰接座的滑橇为例,两个伸缩杆3对称设置在猫道底座4的两侧,沿猫道底座4长度方向可以实现双向移动,向一个方向移动时,将两个伸缩杆3安装在靠近滑橇2一端的猫道底座两侧,如图1所示;向另外一个方向移动时,将伸缩杆拆装在靠近滑橇2另外一端的猫道底座两侧。
24.第一铰接座21配合第三铰接座23用于猫道1的前后方向移动,为了实现猫道1左右方向的移动,如图2所示,在滑橇2上还安装有第二铰接座22,两个第二铰接座22对称安装在猫道底座4两侧的滑橇2上,为了配合第二铰接座22使用,在猫道底座4两侧对称设有第四铰接座24,将伸缩杆3安装在第二铰接座22和第四铰接座24之间,同样通过轴销连接;通过两侧伸缩杆3的拉动实现猫道底座4在滑橇2上的相对移动;为了增大移动的距离,在对应第一铰接座21位置的猫道底座下端设有第一铰接座通过孔41,第一铰接座通过孔41设置在猫道底座4两侧对称设置两个第一铰接座21之间,如图3所示,当伸缩杆3安装在第二铰接座22和第四铰接座24之间时,伸缩杆3拉动猫道底座4相对滑橇2位移,第一铰接座21可以进入第一
铰接座通过孔41,避免第一铰接座21对猫道底座4在滑橇2上的移动造成阻碍。
25.单独通过伸缩杆3配合滑橇2进行猫道搬运时,只能实现猫道移动一个伸缩杆伸缩长度的位移,因为伸缩杆3由初始状态伸长推动猫道底座4在滑橇2上滑动时,滑橇2相对地面静止,猫道底座4相对地面移动,若要实现猫道底座4的再次位移,需要使得滑橇2复位,因此需要保证猫道底座4相对地面静止,将滑橇2相对猫道底座4和地面移动,因此需要将猫道底座4的载荷从滑橇上转移到其他结构上,比如使用千斤顶将猫道底座4抬起。
26.本实施例采用在猫道底座4的两侧安装顶升装置5,顶升装置5选用油缸,顶升装置5的上端安装在猫道底座4的侧面,顶升装置5至少有4个,将猫道底座4相对地面抬起,使得猫道底座4上的重力载荷转移到顶升装置5上且脱离滑橇2,伸缩杆3拉动滑橇2相对猫道底座4前进,重新将猫道底座4的重力载荷转移到滑橇2上,重复操作实现猫道底座4的移动,也即实现猫道底座4上猫道1的移动。
27.为了增大顶升装置5的稳定性以及减少对地面的破坏,顶升装置5的下端还设有凸台状的支撑脚51,可以是圆台也可以是棱台,本实施例中选用圆台状的支撑脚51。
28.前后移动猫道1时,如图1和图5所示,伸缩杆3安装在第一铰接座21和第三铰接座23之间,第一步,初始状态下,伸缩杆3处于收缩状态,顶升装置5也处于收缩状态;第二步,伸缩杆3伸长推动猫道底座4在滑橇2上滑动;第三步,顶升装置5处于伸长状态,将猫道底座4相对滑橇2抬高;第四步,伸缩杆3收缩,拉动滑橇2相对猫道底座4移动;第五步,顶升装置5处于收缩状态,恢复到初始状态;重复上述步骤将猫道移动到指定位置。
29.左右移动猫道时,如图2和图6所示,伸缩杆3安装在第二铰接座22和第四铰接座24之间,第一步,初始状态下,调整伸缩杆3使得猫道底座4一侧的伸缩杆3处于伸长状态,猫道底座4另外一侧的伸缩杆3处于收缩状态,顶升装置5处于收缩状态,此时猫道底座4两侧的第一铰接座21和第二铰接座22不再处于对称状态;第二步,伸长的伸缩杆3收缩,另外一侧收缩的伸缩杆3伸长,使得猫道底座4相对滑橇2滑动;第三步,顶升装置5伸长,将猫道底座4相对滑橇2抬升;第四步,将第二步完成后处于收缩状态的伸缩杆3伸长,将第二步完成后处于伸长状态的伸缩杆3收缩,拉动滑橇2相对猫道底座4移动;第五步,顶升装置5收缩,恢复到初始状态;重复上述步骤将猫道移动到指定位置。
30.对于只有两个第一铰接座的滑橇,向前后方向中的一个方向移动时,和图5所示步骤相同,向另外一个方向移动时,其初始状态是伸缩杆3处于伸长状态,顶升装置5处于收缩状态;伸缩杆3收缩一次,猫道1前进一段距离。
31.本实施例只是对本实用新型的进一步解释,并不是对本实用新型的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性的修改,但是只要在本实用新型的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1