电梯以及电梯的控制方法与流程
1.本发明涉及电梯以及电梯的控制方法。
背景技术:
2.电梯为了乘降人、物品,在建筑构造物的各层设有出入口。同样,在载置人、物品的轿厢也设有人、物品出入的开口部。在该出入口、轿厢的开口部分别设有能够开闭的门。并且,在设于出入口的建筑物侧门以及设于轿厢的轿厢侧门设有在开闭时卡合的卡合部。而且,通过使卡合部卡合,来使建筑物侧门以及轿厢侧门彼此连动地开闭。
3.作为关于轿厢侧门与建筑物侧门的卡合部的技术,例如有专利文献1所记载的技术。在专利文献1中记载有如下技术:将从门全闭状态检测机构检测到轿厢侧门的全闭状态的时刻起在检测到因轿厢侧门的打开动作而两门各自的卡合装置接触时产生的来自转矩指令运算部的转矩指令值的增加的期间的由移动距离运算部运算出的移动距离作为卡合间隙量而保存于存储器。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2010-202335号公报
技术实现要素:
7.发明所要解决的课题
8.并且,轿厢侧门与建筑物侧门的卡合部的位置关系根据轿厢在停靠时的水平方向的位置而变化。而且,若卡合部的位置关系变化,则对开闭驱动轿厢侧门的门马达施加的转矩也变动。然而,在专利文献1所记载的技术中,未能确认针对卡合部的卡合位置的变化而对门马达施加的转矩的变动。
9.本发明考虑到上述问题点,其目的在于提供电梯以及电梯的控制方法,能够确认针对卡合部的卡合位置的变化的门马达的转矩的变动。
10.用于解决课题的方案
11.为了解决上述课题且实现目的,电梯构成为,设于轿厢的轿厢侧门的轿厢侧卡合部与设于轿厢所停止的层的建筑物侧门的建筑物侧卡合部卡合,从而轿厢侧门与建筑物侧门彼此连动地进行开闭动作。
12.并且,电梯具备导轨、主动辊式导向件、门马达以及控制部。导轨沿轿厢升降移动的方向竖立设置。主动辊式导向件沿导轨对轿厢进行导向,并使轿厢沿水平方向移动。门马达开闭驱动轿厢侧门。控制部控制门马达以及主动辊式导向件。并且,控制部在使主动辊式导向件的导辊移动一定量后的状态下,使轿厢侧门进行开闭动作,测定在开闭动作时对门马达施加的转矩值。
13.并且,电梯的控制方法包括以下(1)以及(3)所示的工序。
14.(1)在上述轿厢停靠时使主动辊式导向件的导辊移动一定量的工序,其中,上述主
动辊式导向件使上述轿厢在水平方向上移动。
15.(2)使轿厢侧门进行开闭动作的工序。
16.(3)测定对在开闭动作时驱动轿厢侧门的门马达施加的转矩值的工序。
17.发明的效果如下。
18.根据上述结构的电梯以及电梯的控制方法,能够确认针对卡合部的卡合位置的变化的门马达的转矩的变动。
附图说明
19.图1是示出实施方式例的电梯的简要结构图。
20.图2是示出实施方式例的电梯的轿厢的简要结构图。
21.图3是示出实施方式例的电梯的轿厢的俯视图。
22.图4是示出实施方式例的电梯的主动辊式导向件的简要结构图。
23.图5是示出实施方式例的电梯的主动辊式导向件的立体图。
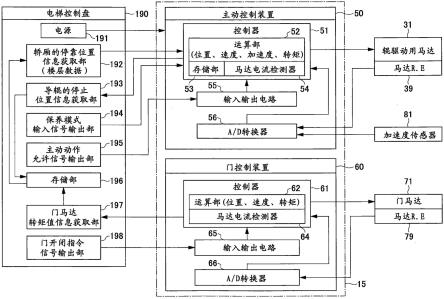
24.图6是示出实施方式例的电梯的控制系统的结构的框图。
25.图7是示出实施方式例的电梯中的保养运转模式的动作例的流程图。
26.图8是示出实施方式例的电梯中的保养运转模式的动作例的流程图。
27.图9是示出实施方式例的电梯中的保养运转模式的动作例的流程图。
28.图10是示出实施方式例的电梯中的保养运转模式的动作例的说明图。
29.图11是实施方式例的电梯中的保养运转模式的变形例的动作例的流程图。
30.图12是示出实施方式例的电梯中的轿厢位置探索动作的动作例的流程图。
31.图13是示出实施方式例的电梯中的轿厢位置探索动作(保养运转模式)的动作例的流程图。
32.图14是示出实施方式例的电梯中的轿厢位置探索动作(保养运转模式)的动作例的流程图。
33.图15是示出实施方式例的电梯中的轿厢位置探索动作(保养运转模式)的动作例的流程图。
34.图16是示出实施方式例的电梯中的轿厢位置探索动作(保养运转模式)的动作例的流程图。
35.图17是示出实施方式例的电梯中的轿厢位置探索动作(保养运转模式)的动作例的流程图。
36.图18是示出实施方式例的电梯中的轿厢位置探索动作(自动运转诊断模式)的动作例的流程图。
37.图19是示出实施方式例的电梯中的轿厢位置探索动作(自动运转诊断模式)的动作例的流程图。
38.图20是示出实施方式例的电梯中的轿厢位置探索动作(自动运转诊断模式)的动作例的流程图。
39.图21是示出实施方式例的电梯中的轿厢位置探索动作(自动运转诊断模式)的动作例的流程图。
40.图22是示出实施方式例的电梯中的轿厢位置探索动作(自动运转诊断模式)的动
作例的流程图。
具体实施方式
41.以下,参照图1~图22对电梯以及电梯的控制方法的实施方式例进行说明。其中,各图中,对共用的部件标注同一符号。
42.1.实施方式例
43.1-1.电梯的结构
44.首先,参照图1及图3对第一实施方式例(以下称为“本例”。)的电梯的结构进行说明。
45.图1是示出本例的电梯的结构例的简要结构图,图2是示出本例的电梯的轿厢的简要结构图。图3是示出轿厢的俯视图。
46.如图1所示,电梯1具备在设于建筑构造物的升降通道200内升降的轿厢2、以及以能够移动的方式支撑轿厢2的导轨3。导轨3配置于轿厢2的与升降移动的上下方向正交的宽度方向的两侧,且沿轿厢2的升降方向竖立设置在升降通道200内。
47.并且,电梯1具备绳索130、平衡配重140、卷扬机100以及电梯控制盘190。并且,在升降通道200的顶部设有机械室160。
48.卷扬机100以及电梯控制盘190配置于机械室160,通过卷绕绳索130来使轿厢2升降。并且,在卷扬机100的近旁设有安装架设绳索130的转向滑轮150。
49.轿厢2经由绳索130与平衡配重140连结,在升降通道200内升降。并且,在建筑构造物的各层中的轿厢2所停止的层站区201设有人、物品出入轿厢2的出入口202。
50.在出入口202设有建筑物侧门203。建筑物侧门203配置为能够开闭出入口202。在建筑物侧门203的升降通道200侧的一面设有建筑物侧卡合部204。建筑物侧卡合部204从建筑物侧门203的一面朝向升降通道200突出。
51.为了人、物品出入,轿厢2具有轿厢室10、轿厢侧门11以及主动辊式导向件12。并且,轿厢2具有控制轿厢侧门11及主动辊式导向件12的轿厢侧控制部15。
52.在轿厢室10设有开口部10a,且在该开口部10a能够开闭地设置有轿厢侧门11。轿厢侧门11通过设于轿厢2的门马达71(参照图6)进行开闭动作。
53.在轿厢侧门11的升降通道200侧的一面设有轿厢侧卡合部13。在轿厢2在任意层停止时,轿厢侧卡合部13与设于建筑物侧门203的建筑物侧卡合部204卡合。而且,通过使建筑物侧卡合部204与轿厢侧卡合部13卡合,从而建筑物侧门203以及轿厢侧门11一体地开闭移动。
54.主动辊式导向件12配置于轿厢室10的上部和下部。并且,主动辊式导向件12配置于轿厢室10中的轿厢侧门11的开闭方向即宽度方向的两侧。而且,主动辊式导向件12与导轨3对置。
55.并且,主动辊式导向件12沿导轨3对轿厢2进行导向。再有,主动辊式导向件12通过使下述的导辊21a、21b、21c移动,来使轿厢2沿水平方向位移。而且,主动辊式导向件12具有作为抑制轿厢2所产生的振动的减振装置的作用。
56.此处,将轿厢侧门11与建筑物侧门203对置的方向作为第一方向x,将与第一方向x正交且与轿厢侧门11的开闭方向平行的方向作为第二方向y。而且,第一方向x以及第二方
向y与轿厢2的升降方向正交且与水平方向平行。
57.1-2.主动辊式导向件的结构
58.接下来,参照图4及图5对主动辊式导向件12的结构进行说明。
59.图4是示出主动辊式导向件12的简要结构图,图5是示出主动辊式导向件12的立体图。
60.如图4及图5所示,主动辊式导向件12具有第一导辊21a、第二导辊21b以及第三导辊21c。第一导辊21a与第二导辊21b以在中间隔着导轨3的状态配置。第三导辊21c配置于第一导辊21a与第二导辊21b之间,且配置于与导轨3对置的位置。导辊21a、21b、21c与导轨3接触。
61.并且,主动辊式导向件12具有使第一导辊21a及第二导辊21b移动的第一驱动机构22、使第三导辊21c移动的第二驱动机构24、以及支撑台25。
62.再有,主动辊式导向件12具有能够旋转地支撑第一导辊21a的第一杠杆23a、能够旋转地支撑第二导辊21b为第二杠杆23b、以及能够旋转地支撑第三导辊21c的未图示的第三杠杆。第一导辊21a经由轴部40能够旋转地支撑在第一杠杆23a的长度方向的中间部,第二导辊21b经由轴部40能够旋转地支撑在第二杠杆23b的长度方向的中间部。同样,第三导辊21c经由轴部40能够旋转地支撑在第三杠杆的长度方向的中间部。
63.支撑台25固定于轿厢2中的支撑轿厢室10的未图示的轿厢框架。具有连结部26、第一支撑板27以及第二支撑板28。第一支撑板27与第二支撑板28在上下方向上对置。而且,第一支撑板27与第二支撑板28由连结部26连结。在第一支撑板27配置有第一驱动机构22以及第二驱动机构24。
64.并且,在第二支撑板28设有第一支撑部29a、第二支撑部29b以及未图示的第三支撑部。第一杠杆23a的长度方向的一端部经由摆动轴41能够摆动地安装于第一支撑部29a。第二杠杆23b的长度方向的一端部经由摆动轴41能够摆动地安装于第二支撑部29b。同样,第三杠杆能够摆动地安装于第三支撑部。并且,第一杠杆23a、第二杠杆23b各自的长度方向与上下方向大致平行地配置。
65.在第一杠杆23a及第二杠杆23b的长度方向的另一端部插入有杆36。杆36以其轴向与第一导辊21a与第二导辊21b对置的方向大致平行的方式延伸。在杆36的轴向的两端部分别安装有弹性部件37和保持弹性部件37的螺母38。
66.作为弹性部件37,在本例的主动辊式导向件12中应用压缩螺旋弹簧。而且,弹性部件37以压缩的状态被夹在螺母38与第一杠杆23a或第二杠杆23b之间。此外,弹性部件37不限定于压缩螺旋弹簧,也可以应用橡胶、板簧等其它各种具有弹性的部件。
67.并且,在杆36的轴向的中间部固定有下述的第一驱动机构22的可动部件33。第一驱动机构22具有辊驱动用马达31、滚珠丝杠32、可动部件33以及台座34。
68.辊驱动用马达31以及台座34配置于第一支撑板27。辊驱动用马达31基于从下述的主动控制装置50输出的驱动信号进行旋转驱动。在辊驱动用马达31的驱动轴连结有滚珠丝杠32。滚珠丝杠32能够旋转地被台座34支撑。
69.在滚珠丝杠32螺纹结合有可动部件33。并且,可动部件33固定于杆36,以滚珠丝杠32的轴心为中心的旋转受到限制。而且,若滚珠丝杠32旋转,则与滚珠丝杠32螺纹结合的可动部件33沿滚珠丝杠32的轴向进行直线移动。通过可动部件33直线移动,从而固定有可动
部件33的杆36使安装于两端部的弹性部件37伸缩而移动。
70.对第一杠杆23a及第二杠杆23b的另一端部施加的来自弹性部件37的作用力变化,从而第一杠杆23a及第二杠杆23b以摆动轴41为中心摆动。由此,安装于第一杠杆23a及第二杠杆23b的第一导辊21a以及第二导辊21b移动,第一导辊21a及第二导辊21b按压导轨3的按压力变化。
71.并且,与第一驱动机构22相同,第二驱动机构24具有辊驱动用马达31、未图示的滚珠丝杠32、可动部件33以及台座34。而且,在可动部件33设有未图示的杆。在该杆安装有弹性部件以及螺母,并且连接有第三杠杆的长度方向的另一端部。其它结构与第一驱动机构22相同,因此省略其说明。
72.使导辊21a、21b、21c移动的驱动机构22、24不限定于上述结构,例如,能够应用使用了多个齿轮的机构、凸轮等其它各种用于使部件移动的机构。并且,对在杠杆23a、23b、23c的一端部设置摆动轴41来使杠杆23a、23b、23c摆动的例子进行了说明,但不限定于此。例如,也可以以与杆36、滚珠丝杠32平行地移动的方式支撑杠杆23a、23b、23c的一端部,来使杠杆23a、23b、23c直线移动。
73.1-3.控制系统的结构例
74.接下来,参照图6对具有上述结构的电梯1的控制系统的结构进行说明。
75.图6是示出控制系统的结构的框图。
76.如图6所示,电梯1具有示出控制部的一例的电梯控制盘190和轿厢侧控制部15。电梯控制盘190具有电源191、停靠位置信息获取部192、停止位置信息获取部193、保养模式输入信号输出部194、主动动作允许信号输出部195以及存储部196。并且,电梯控制盘190具有门马达转矩值信息获取部197和门开闭指令信号输出部198。
77.电源191向电梯1整体供给电力。停靠位置信息获取部192从存储部196获取轿厢2所停止的层的信息(楼层数据)。并且,停靠位置信息获取部192将楼层数据发送至下述的轿厢侧控制部15的主动控制装置50。
78.停止位置信息获取部193从主动控制装置50获取在轿厢2所停止的层的导辊21a、21b、21c的停止位置。并且,停止位置信息获取部193将获取到的导辊21a、21b、21c的停止位置存储于存储部196。
79.在进行保养运转模式时,保养模式输入信号输出部194将保养模式输入信号输出至主动控制装置50。并且,在允许主动辊式导向件12的动作时,主动动作允许信号输出部195将动作允许信号输出至主动控制装置50。
80.门马达转矩值信息获取部197从门控制装置60获取在轿厢侧门11的开闭动作时施加的门马达71的转矩值信息。然后,门马达转矩值信息获取部197将获取到的转矩值信息存储于存储部196。在使轿厢侧门11以及建筑物侧门203进行开闭动作时,门开闭指令信号输出部198将门开闭指令信号输出至门控制装置60。
81.轿厢侧控制部15具有控制主动辊式导向件12的驱动的主动控制装置50以及控制轿厢侧门11的开闭动作的门控制装置60。示出控制部的一例的主动控制装置50具有控制器51、输入输出电路55以及a/d转换器56。并且,控制器51具有运算部52、存储部53以及马达电流检测器54。
82.a/d转换器56将设于辊驱动用马达31的旋转编码器(马达r.e)39的检测信号进行
a/d转换,并将其输出至控制器51。并且,a/d转换器56将设于轿厢2的加速度传感器81的检测信号进行a/d转换,并将其输出至控制器51。
83.加速度传感器81在轿厢2的升降移动时检测轿厢室10的振动。然后,加速度传感器81将检测信号输出至主动控制装置50。在轿厢2的升降移动时,主动控制装置50基于来自加速度传感器81的检测信号,来使辊驱动用马达31驱动。由此,主动辊式导向件12的导辊21a、21b、21c移动,进行抑制轿厢2所产生的振动的减振动作。
84.输入输出电路55接收来自电梯控制盘190的保养模式输入信号输出部194以及主动动作允许信号输出部195的输出信号,并将接收到的输出信号输出至控制器51。
85.运算部52根据来自加速度传感器81的检测信号、来自保养模式输入信号输出部194以及主动动作允许信号输出部195的输出信号,对辊驱动用马达31的驱动信号进行运算。然后,控制器51基于运算出的驱动信号来使辊驱动用马达31驱动。
86.并且,马达电流检测器54检测驱动时的辊驱动用马达31的电流值。马达电流检测器54将检测到的电流值输出至运算部52。然后,运算部52基于电流值来对施加于辊驱动用马达31的转矩进行运算。
87.在存储部53中存储每层的导辊21a、21b、21c的停止位置信息。当轿厢2停止在任意层时,运算部52以使导辊21a、21b、21c在存储部53所存储的停止位置停止的方式控制辊驱动用马达31的驱动。并且,在下述的自动运转诊断模式时,运算部52对存储部53所存储的停止位置信息进行更新。
88.示出控制部的一例的门控制装置60具有控制器61、输入输出电路65以及a/d转换器66。控制器61具有运算部62和马达电流检测器64。
89.a/d转换器66将设于门马达71的旋转编码器(马达r.e)79的检测信号进行a/d转换,并将其输出至控制器61。控制器61的运算部62基于经由a/d转换器66接收到的来自马达r.e79的检测信号,来检测轿厢侧门11的开门端以及关门端。
90.此外,开门端以及关门端的检测不限定于使用马达r.e79的检测信号。例如,也可以在轿厢侧门11的开门端以及关门端设置机械式的检测开关,使用来自该检测开关的检测信号来检测轿厢侧门11的开门端以及关门端。
91.输入输出电路65从电梯控制盘190的门开闭指令信号输出部198接收门开闭指令信号。然后,输入输出电路65将接收到的门开闭指令信号输出至控制器61。
92.运算部62基于门开闭指令信号来对驱动门马达71的驱动信号进行运算。然后,运算部62基于运算出的驱动信号来驱动门马达71,进行轿厢侧门11的开闭动作。
93.并且,马达电流检测器64检测驱动时的门马达71的电流值。马达电流检测器64将检测到的电流值输出至运算部62。然后,运算部62基于电流值来对施加于门马达71的转矩进行运算。并且,控制器61将运算出的门马达71的转矩值信息输出至电梯控制盘190的门马达转矩值信息获取部197。
94.此外,在本例中,对根据电流值来检测门马达71的转矩值的例子进行了说明,但不限定于此,也可以在门马达71设置检测门马达71的转矩值的转矩检测部。
95.2.动作例
96.接下来,参照图7至图22对具有上述结构的电梯1的动作例进行说明。
97.2-1.保养运转模式的动作例
98.首先,参照图7至图11对保养运转模式的动作例进行说明。图7至图9是示出保养运转模式的动作例的流程图,图10是示出保养运转模式的动作例的说明图。
99.图7至图11所示的保养运转模式是在使主动辊式导向件12最大限度地可移动时诊断轿厢侧门11的门马达71的过载异常的动作例,在轿厢2在任意层停止时进行。
100.如图7所示,首先,主动控制装置50判断主动辊式导向件12的动作允许信号(动作允许旗标)是否开启(步骤s11)。在步骤s11的处理中,在未从主动动作允许信号输出部195输出动作允许信号的情况下,动作允许信号关闭,若从主动动作允许信号输出部195输出动作允许信号,则动作允许信号开启。
101.在步骤s11的处理中,在主动控制装置50判断为动作允许信号关闭的情况下(步骤s11的否定判定),保养运转模式的动作结束。与此相对,在步骤s11的处理中,在主动控制装置50判断为动作允许信号开启的情况下(步骤s11的肯定判定),判断当前的运转模式是否是保养运转模式(步骤s12)。
102.在步骤s12的处理中,在主动控制装置50判断为当前的运转模式不是保养运转模式的情况下(步骤s12的否定判定),保养运转模式的动作结束。
103.并且,若从保养模式输入信号输出部194向主动控制装置50输出保养模式输入信号,则当前的运转模式成为保养运转模式。然后,在步骤s12的处理中,在主动控制装置50判断为模式是保养运转模式的情况下(步骤s12的肯定判定),驱动使导辊21a、21b、21c移动的辊驱动用马达31(步骤s13)。主动控制装置50的控制器51进行辊驱动用马达31的驱动。
104.接下来,主动控制装置50的马达电流检测器54检测辊驱动用马达31的电流值。主动控制装置50的运算部52根据电流值来运算辊驱动用马达31的转矩。然后,在主动辊式导向件12的导辊21a、21b、21c可移动至最大限度的情况下,辊驱动用马达31的转矩上升。
105.然后,主动控制装置50的运算部52判断辊驱动用马达31的转矩是否超过了阈值(步骤s14)。在步骤s14的处理中,主动控制装置50的控制器51继续辊驱动用马达31的驱动直到转矩超过阈值为止。
106.在步骤s14的处理中,在运算部52判断为转矩超过了阈值的情况下,控制器51使辊驱动用马达31的驱动停止(步骤s15)。然后,若主动控制装置50使主动辊式导向件12可移动至最大限度,使辊驱动用马达31停止,则将停止信息输出至电梯控制盘190。
107.由此,如图10所示,轿厢2在第一方向x和/或第二方向y上移动,从预定的位置相对于建筑物侧门203位移。由此,轿厢侧卡合部13与建筑物侧卡合部204的位置关系变化,因此轿厢侧卡合部13与建筑物侧卡合部204的间隔变化。
108.此外,也可以使轿厢2仅在第一方向x或第二方向y上移动。并且,通过使主动辊式导向件12可移动至最大限度,能够再现轿厢2相对于层站区201在第一方向x及第二方向y上最大限度地位移后的状态。
109.此外,在本例中,对根据辊驱动用马达31的转矩来检测主动辊式导向件12的可动极限的例子进行了说明,但不限定于此。也可以在主动辊式导向件12的驱动机构22、24设置机械式的检测开关,使用来自该检测开关的检测信号来检测主动辊式导向件12的可动极限。
110.接下来,如图8所示,门开闭指令信号输出部198将开门指令输出至门控制装置60(步骤s16)。若门控制装置60的控制器61接收到开门指令,则驱动门马达71,进行轿厢侧门
11的打开动作。通过使轿厢侧门11进行打开动作,从而在轿厢2相对于建筑物侧门203位移后的状态下,轿厢侧卡合部13与建筑物侧卡合部204卡合。然后,轿厢侧门11和建筑物侧门203一起打开。
111.接下来,门控制装置60的马达电流检测器64检测打开动作时的门马达71的电流值。门控制装置60的运算部62根据电流值运算门马达71的转矩值。然后,门控制装置60测定开门动作时的门马达71的转矩值(步骤s17)。
112.接下来,门控制装置60的控制器61基于来自门马达71的马达r.e79的信息、来自检测开关的信息,来判断轿厢侧门11是否移动至开门端(步骤s18)。门控制装置60的控制器61继续进行打开动作以及转矩值的测定动作直到轿厢侧门11移动至开门端为止。
113.并且,在步骤s18的处理中,在判断为轿厢侧门11移动至开门端的情况下(步骤s18的肯定判定),门控制装置60将开门完成信息输出至电梯控制盘190。然后,门开闭指令信号输出部198将关门指令输出至门控制装置60(步骤s19)。若门控制装置60的控制器61接收到关门指令,则驱动门马达71,进行轿厢侧门11的关闭动作。
114.接下来,门控制装置60基于马达电流检测器64检测到的门马达71的电流值,来测定关门动作时的门马达71的转矩值(步骤s20)。门控制装置60的控制器61判断轿厢侧门11是否移动至关门端(步骤s21)。门控制装置60的控制器61继续进行关闭动作以及转矩值的测定动作直到轿厢侧门11移动至关门端为止。
115.并且,在步骤s21的处理中,在判断为轿厢侧门11移动至开门端的情况下(步骤s21的肯定判定),门控制装置60将关门完成信息输出至电梯控制盘190。接下来,如图9所示,门控制装置60的运算部62判断开门、关门动作时的门马达71的转矩值是否为阈值以下(步骤s22)。在该保养运转模式中,在步骤s22的处理中,判断门马达71是否产生了过载异常。
116.在步骤s22的处理中,在运算部62判断为转矩值为阈值以下的情况下(步骤s22的肯定判定),判定诊断结果为合格,并输出至电梯控制盘190(步骤s23)。由此,保养运转模式的动作结束。
117.与此相对,在步骤s22的处理中,在运算部62判断为转矩值超过阈值的情况下(步骤s22的否定判定),判定诊断结果为不合格,并输出至电梯控制盘190(步骤s24)。由此,保养运转模式的动作结束。
118.此外,步骤s22中的判定处理也可以由电梯控制盘190进行。并且,诊断结果也可以不仅向电梯控制盘190输出,还向外部的监视中心输出。
119.如步骤s24的处理所示,在诊断结果为不合格的情况下,进行轿厢侧卡合部13及建筑物侧卡合部204的安装位置的调整、主动辊式导向件12的调整作业。
120.通过进行上述的工序,在轿厢2相对于层站区201在第一方向x及第二方向y上最大限度地位移后的情况下,能够确认门马达71是否产生了过载异常。即,即使在轿厢2相对于层站区201最大限度地位移后的情况下,也能够确认轿厢侧门11以及建筑物侧门203是否正常地进行开闭动作。
121.[变形例]
[0122]
在图7所示的动作例中,对主动辊式导向件12自动地动作的例子进行了说明,但不限定于此,也可以由作业人员的手使主动辊式导向件12的驱动机构22、24动作。图11是示出保养运转模式的变形例的动作例的流程图。
[0123]
如图11所示,首先,主动控制装置50判断主动辊式导向件12的动作允许信号(动作允许旗标)是否开启(步骤s31)。在步骤s31的处理中,在主动控制装置50判断为动作允许信号关闭的情况下(步骤s31的否定判定),保养运转模式的动作结束。
[0124]
与此相对,在步骤s31的处理中,在主动控制装置50判断为动作允许信号开启的情况下(步骤s31的肯定判定),判断当前的运转模式是否是保养运转模式(步骤s32)。在步骤s32的处理中,在主动控制装置50判断为当前的运转模式不是保养运转模式的情况下(步骤s32的否定判定),保养运转模式的动作结束。
[0125]
在步骤s32的处理中,在主动控制装置50判断为是保养运转模式的情况下(步骤s32的肯定判定),使对辊驱动用马达31进行制动的未图示的制动器释放(步骤s33)。接下来,作业人员手动地使辊驱动用马达31旋转,来使导辊21a、21b、21c移动至可动极限(步骤s34)。在步骤s34的处理中,例如,通过手动使驱动机构22、24的滚珠丝杠32旋转。
[0126]
此外,之后的处理与图8及图9所示的处理相同,因此省略其说明。这样,通过由作业人员的手使主动辊式导向件12可动,能够进行保养运转动作。
[0127]
2-2.轿厢位置探索动作
[0128]
接下来,参照图12至图22对轿厢位置探索动作进行说明。
[0129]
图12至图22是示出轿厢位置探索动作的流程图。其中,图13至图17示出保养运转模式,图18至图22示出自动运转诊断模式。保养运转模式在轿厢2停止在任意层的状态下实施,在自动运转诊断模式中,一边使轿厢2正常运转一边实施。
[0130]
图12至图22所示的轿厢位置探索动作是在轿厢2的正常运转时探索避免产生门马达71的过载异常的轿厢位置的动作。该轿厢位置探索动作在轿厢2停止的每个层进行。
[0131]
如图12所示,电梯控制盘190判断轿厢2是否停靠(步骤s41)。在步骤s41的处理中,在判断为轿厢2未停靠的情况下(步骤s41的否定判定),轿厢2正在升降通道200内进行升降移动。然后,主动控制装置50基于来自设于轿厢2的加速度传感器81的检测信号来驱动主动辊式导向件12,进行抑制轿厢2所产生的振动的减振动作。
[0132]
再有,若轿厢2接近目的地楼层,则主动控制装置50以在目的地楼层停靠时成为存储部53所存储的目标辊位置的方式驱动主动辊式导向件12来使导辊21a、21b、21c移动(步骤s42)。
[0133]
然后,在步骤s41的处理中,在判断为轿厢2已停靠的情况下(步骤s41的肯定判定),主动控制装置50判断主动辊式导向件12的动作允许信号(动作允许旗标)是否关闭(步骤s43)。此外,若轿厢2停靠,且主动辊式导向件12的动作停止,则动作允许信号关闭。
[0134]
在步骤s43的处理中,在主动控制装置50判断为主动辊式导向件12的动作允许信号开启的情况下(步骤s43的否定判定),使动作允许信号为关闭,再次进行步骤s43的处理。
[0135]
在步骤s43的处理中,在主动控制装置50判断为动作允许信号关闭的情况下(步骤s43的肯定判定),判断当前的运转模式是否是保养运转模式(步骤s44)。在步骤s44的处理中,在判断为模式不是保养运转模式的情况下(步骤s44的否定判定),进行下述的步骤s47的处理。
[0136]
并且,在步骤s44的处理中,在判断为模式是保养运转模式的情况下(步骤s44的肯定判定),主动控制装置50从停靠位置信息获取部192获取轿厢2停靠的层的楼层数据(步骤s45)。接下来,主动控制装置50将轿厢2停靠时的导辊21a、21b、21c的位置(以下简称为辊位
置)存储于存储部53(步骤s46)。然后,进行图13所示的步骤s49的处理。
[0137]
在步骤s47的处理中,主动控制装置50判断当前的运转模式是否是自动运转诊断模式。在步骤s47的处理中,在判断为是自动运转诊断模式的情况下(步骤s47的肯定判定),主动控制装置50将测定信号(测定旗标)开启(步骤s48)。然后,实施图18至图22所示的自动运转诊断模式。在下文中说明自动运转诊断模式。
[0138]
并且,在步骤s47的处理中,在判断为不是自动运转诊断模式的情况下(步骤s47的否定判定),当前的运转模式为与保养运转模式及自动运转诊断模式不同的运转模式。然后,如图17所示,动作结束。
[0139]
如图13所示,若步骤s46的处理结束,则门开闭指令信号输出部198将开门指令输出至门控制装置60(步骤s49)。若门控制装置60的控制器61接收到开门指令,则驱动门马达71,进行轿厢侧门11的打开动作。
[0140]
接下来,门控制装置60基于马达电流检测器64检测到的门马达71的电流值,来检测开门动作时的门马达71的转矩值(步骤s50)。门控制装置60的控制器61判断轿厢侧门11是否移动至开门端(步骤s51)。门控制装置60的控制器61继续进行打开动作以及转矩值的检测动作直到轿厢侧门11移动至开门端为止。
[0141]
接下来,控制器61更新针对当前的辊位置的门马达71的转矩值的最大值,并将转矩值信息输出至门马达转矩值信息获取部197(步骤s52)。门马达转矩值信息获取部197将获取到的转矩值信息与对应的辊位置信息一起存储于存储部196。
[0142]
接下来,如图14所示,门开闭指令信号输出部198将关门指令输出至门控制装置60(步骤s53)。若门控制装置60的控制器61接收到关门指令,则驱动门马达71,进行轿厢侧门11的关闭动作。
[0143]
接下来,门控制装置60基于马达电流检测器64检测到的门马达71的电流值,来检测关门动作时的门马达71的转矩值(步骤s54)。门控制装置60的控制器61判断轿厢侧门11是否移动至关门端(步骤s55)。门控制装置60的控制器61继续进行关闭动作以及转矩值的测定动作直到轿厢侧门11移动至关门端为止。
[0144]
接下来,控制器61更新针对当前的辊位置的门马达71的转矩值的最大值,并将转矩值信息输出至门马达转矩值信息获取部197(步骤s56)。门马达转矩值信息获取部197将获取到的转矩值信息与对应的辊位置信息一起存储于存储部196。
[0145]
接下来,主动控制装置50判断正方向测定中信号(正方向测定中旗标)是否开启(步骤s57)。在步骤s57的处理中,在判断为正方向测定中信号开启的情况下(步骤s57的肯定判定),主动控制装置50进行下述的步骤s63的处理。
[0146]
与此相对,在判断为正方向测定中信号关闭的情况下(步骤s57的否定判定),主动控制装置50判断负方向测定中信号(负方向测定中旗标)是否开启(步骤s58)。在步骤s58的处理中,在判断为负方向测定中信号开启的情况下(步骤s58的肯定判定),主动控制装置50进行下述的步骤s68的处理。
[0147]
此处,正方向为与第一方向x及第二方向y平行的方向,负方向为在第一方向x及第二方向y上与正方向相反的方向。
[0148]
与此相对,在判断为负方向测定中信号关闭的情况下(步骤s58的肯定判定),进行图15所示的步骤s59的处理。在步骤s59的处理中,电梯控制盘190的主动动作允许信号输出
部195将动作允许信号输出至主动控制装置50。然后,若从主动动作允许信号输出部195输出动作允许信号,则主动控制装置50将动作允许信号(旗标)开启。
[0149]
接下来,主动控制装置50将正方向测定中信号(正方向测定中旗标)开启(步骤s60)。然后,主动控制装置50控制辊驱动用马达31的驱动,从轿厢2停靠时的辊位置起沿第一方向x和/或第二方向y向正方向移动预定量(步骤s61)。在本例中,作为预定量,移动0.5mm。并且,主动控制装置50将移动后的辊位置信息输出至停止位置信息获取部193。
[0150]
在步骤s61的处理中,在向第一方向x移动的情况下,使第一导辊21a和第二导辊21b移动,在向第二方向y移动的情况下,使第三导辊21c移动。
[0151]
接下来,电梯控制盘190判断通过步骤s61的处理而移动后的辊位置是否是已完成测定门马达71的开闭动作时的转矩值的辊位置(步骤s62)。在步骤s62的处理中,在判断为是测定未进行的辊位置的情况下(步骤s62的否定判定),返回至步骤s49的处理。
[0152]
然后,进行步骤s49的处理至步骤s56的处理,再次开闭轿厢侧门11,测定开闭动作中的门马达71的转矩值。并且,在步骤s52及步骤s56的处理中,更新针对移动后的辊位置的门马达71的转矩值的最大值,并将转矩值信息输出至门马达转矩值信息获取部197。门马达转矩值信息获取部197将获取到的转矩值信息与对应的辊位置信息一起存储于存储部196。
[0153]
并且,在从步骤s62的处理返回至步骤s49的处理的情况下,由于正方向测定中信号(正方向测定中旗标)开启,所以在步骤s57的处理中成为肯定判定。因此,移至步骤s63的处理。在步骤s63的处理中,主动控制装置50判断从当前的辊位置起进一步向正方向移动预定量(0.5mm)后的位置是否在轿厢可移动范围以内。即,判断是否在主动辊式导向件12的设计阈值以内。
[0154]
然后,在步骤s63的处理中,在判断为在轿厢可移动范围以内的情况下(步骤s63的肯定判定),返回至步骤s60的处理。并且,在步骤s61的处理中,使辊位置向正方向移动预定量。然后,测定在移动后的辊位置的门马达71的转矩值。由此,在存储部196存储使轿厢2向正方向各移动预定量直到可移动范围的门马达71的转矩值信息。
[0155]
并且,在步骤s62的处理中,在判断为当前的辊位置是测定已完成的辊位置的情况下(步骤s62的肯定判定),主动控制装置50将正方向测定中信号关闭(步骤s64)。再有,在步骤s63的处理中,在判断为在轿厢可移动范围外的情况下(步骤s63的否定判定),实施步骤s64的处理。
[0156]
若步骤s64的处理结束,则如图16所示,主动控制装置50将负方向测定中信号(正方向测定中旗标)开启(步骤s65)。然后,主动控制装置50控制辊驱动用马达31的驱动,从轿厢2停靠时的辊位置起沿第一方向x和/或第二方向y向负方向移动预定量(步骤s66)。在本例中,作为预定量,移动0.5mm。并且,主动控制装置50将移动后的辊位置信息输出至停止位置信息获取部193。
[0157]
接下来,电梯控制盘190判断通过步骤s61的处理而移动后的辊位置是否是已完成测定门马达71的开闭动作时的转矩值的辊位置(步骤s67)。在步骤s62的处理中,在判断为是测定未进行的辊位置的情况下(步骤s67的否定判定),返回至步骤s49的处理。
[0158]
然后,进行步骤s49的处理至步骤s56的处理,再次开闭轿厢侧门11,测定开闭动作中的门马达71的转矩值。并且,在步骤s52及步骤s56的处理中,更新针对移动后的辊位置的门马达71的转矩值的最大值,并将转矩值信息输出至门马达转矩值信息获取部197。
[0159]
并且,在从步骤s62的处理返回至步骤s49的处理的情况下,由于正方向测定中信号(正方向测定中旗标)关闭,所以在步骤s57的处理中成为否定判定。此外,由于负方向测定中信号(负方向测定中旗标)开启,所以在步骤s58的处理中成为肯定判定。
[0160]
因此,移至步骤s68的处理。在步骤s68的处理中,主动控制装置50判断从当前的辊位置起进一步向负方向移动预定量(0.5mm)后的位置是否在轿厢可移动范围以内。即,判断是否在主动辊式导向件12的设计阈值以内。
[0161]
然后,在步骤s68的处理中,在判断为在轿厢可移动范围以内的情况下(步骤s68的肯定判定),返回至步骤s65的处理。并且,在步骤s66的处理中,使辊位置向负方向移动预定量。然后,测定在移动后的辊位置的门马达71的转矩值。由此,在存储部196存储使轿厢2向负方向各移动预定量直到可移动范围为止的门马达71的转矩值信息。
[0162]
并且,在步骤s67的处理中,在判断为当前的辊位置是测定已完成的辊位置的情况下(步骤s67的肯定判定),主动控制装置50将正方向测定中信号关闭(步骤s69)。再有,在步骤s68的处理中,在判断为在轿厢可移动范围外的情况下(步骤s68的否定判定),实施步骤s69的处理。
[0163]
若步骤s69的处理结束,则主动控制装置50将主动动作允许信号关闭(步骤s70)。
[0164]
如图17所示,接下来,电梯控制盘190检索存储部196所存储的转矩值信息中的在正方向测定中最小的转矩值。然后,电梯控制盘190检索成为最小的转矩值的辊位置信息(步骤s71)。接下来,电梯控制盘190检索存储部196所存储的转矩值信息中的在负方向测定中最小的转矩值。然后,电梯控制盘190检索成为最小的转矩值的辊位置信息(步骤s72)。
[0165]
接下来,电梯控制盘190计算在步骤s71及步骤s72的处理中检索到的辊位置的平均值(步骤s73)。即,在步骤s73的处理中,计算在步骤s71和步骤s71的处理中检索到的辊位置的中心位置。
[0166]
接下来,电梯控制盘190判断此次的辊位置的转矩值是否比在前次的保养运转模式中设定的辊位置的转矩值小(步骤s74)。此次的辊位置的转矩值是在此次的保养运转模式中测定出的转矩值中的最小的转矩值。即,设定在步骤s71及步骤s72中使用的转矩值中的较小的转矩值。
[0167]
在步骤s74的处理中,在判断为此次的辊位置的转矩值较小的情况下(步骤s74的肯定判定),主动控制装置50将此次测定出的辊位置存储于存储部53(步骤s75)。此处,此次测定出的辊位置是在步骤s73的处理中计算出的辊位置。
[0168]
并且,在步骤s74的处理中,在判断为前次的辊位置的转矩值较小的情况下(步骤s74的否定判定),主动控制装置50将前次测定出的辊位置存储于存储部53(步骤s76)。
[0169]
然后,主动控制装置50将轿厢2停靠于当前的层时的辊位置设定为在存储部53中存储的辊位置(步骤s77)。由此,正常运转时的保养运转模式中的辊位置、即轿厢位置探索动作完成。其结果,能够更新门马达71的转矩值最小的辊位置,从而能够防止门马达71产生过载异常。
[0170]
并且,在自动运转诊断模式中,如图18所示,主动控制装置50判断负方向测定中信号(负方向测定中旗标)是否开启(步骤s81)。在步骤s81的处理中,在判断为负方向测定中信号开启的情况下(步骤s81的肯定判定),进行下述的步骤s83的处理。
[0171]
并且,在步骤s81的处理中,在判断为负方向测定中信号关闭的情况下(步骤s81的
否定判定),主动控制装置50将正方向测定中信号开启(步骤s82)。然后,主动控制装置50判断测定信号(测定旗标)是否开启(步骤s83)。
[0172]
在步骤s83的处理中,在判断为测定信号开启的情况下(步骤s83的肯定判定),主动控制装置50从停靠位置信息获取部192获取轿厢2所停靠的层的楼层数据(步骤s84)。接下来,主动控制装置50将轿厢2停靠时的辊位置存储于存储部53(步骤s85)。
[0173]
接下来,如图19所示,门开闭指令信号输出部198向门控制装置60输出开门指令(步骤s86)。若门控制装置60的控制器61接收到开门指令,则驱动门马达71,进行轿厢侧门11的打开动作。
[0174]
接下来,门控制装置60基于马达电流检测器64所检测到的门马达71的电流值,来检测开门动作时的门马达71的转矩值(步骤s87)。门控制装置60的控制器61判断轿厢侧门11是否移动至开门端(步骤s88)。门控制装置60的控制器61继续进行打开动作以及转矩值的检测动作直到轿厢侧门11移动至开门端为止。
[0175]
接下来,控制器61更新针对当前的辊位置的门马达71的转矩值的最大值,并将转矩值信息输出至门马达转矩值信息获取部197(步骤s89)。门马达转矩值信息获取部197将获取到的转矩值信息与对应的辊位置信息一起存储于存储部196。
[0176]
并且,门开闭指令信号输出部198向门控制装置60输出关门指令(步骤s90)。若门控制装置60的控制器61接收到关门指令,则驱动门马达71,进行轿厢侧门11的关闭动作。
[0177]
接下来,门控制装置60基于马达电流检测器64所检测到的门马达71的电流值,来检测关门动作时的门马达71的转矩值(步骤s91)。门控制装置60的控制器61判断轿厢侧门11是否移动至关门端(步骤s92)。门控制装置60的控制器61继续进行关闭动作以及转矩值的测定动作直到轿厢侧门11移动至关门端为止。
[0178]
接下来,控制器61更新针对当前的辊位置的门马达71的转矩值的最大值,并将转矩值信息输出至门马达转矩值信息获取部197(步骤s93)。门马达转矩值信息获取部197将获取到的转矩值信息与对应的辊位置信息一起存储于存储部196。
[0179]
接下来,如图20所示,主动控制装置50判断正方向测定中信号(正方向测定中旗标)是否开启(步骤s94)。在步骤s94的处理中,在判断为正方向测定中信号关闭的情况下(步骤s94的否定判定),主动控制装置50进行下述的步骤s105的处理。
[0180]
并且,在步骤s94的处理中,在判断为正方向测定中信号开启的情况下(步骤s94的肯定判定),进行步骤s95的处理。在步骤s95的处理中,主动控制装置50判断从前次的目标辊位置起向正方向移动预定量(0.5mm)后的位置是否在轿厢可移动范围以内。即,判断是否在主动辊式导向件12的设计阈值以内。此外,前次的目标辊位置是在步骤s42的处理中移动后的辊位置。
[0181]
然后,在步骤s95的处理中,在判断为在轿厢可移动范围以内的情况下(步骤s95的肯定判定),电梯控制盘190进行步骤s96的处理。在步骤s96的处理中,判断通过步骤s95的处理而移动后的辊位置是否是已完成测定门马达71的开闭动作时的转矩值的辊位置。
[0182]
在步骤s96的处理中,在判断为是测定未进行的辊位置的情况下(步骤s96的否定判定),进行步骤s97的处理。在步骤s97的处理中,电梯控制盘190将使当前的目标辊位置向正方向移动预定量(0.5mm)后的辊位置作为目标辊位置,并作为当前轿厢2正停靠的层的楼层数据而登记。并且,主动控制装置50将已登记的目标辊位置存储于存储部53。
[0183]
接下来,主动控制装置50将测定信号关闭(步骤s98),返回至步骤s83的处理。由于测定信号关闭,所以在步骤s83的处理中成为否定判定,如图22所示,动作结束。然后,当轿厢2再次在该层停靠时,在图12所示的步骤s42的处理中,主动控制装置50使导辊21a、21b、21c移动至在步骤s97的处理中设定的目标辊位置。
[0184]
此外,在步骤s47的处理中,由于处于自动运转诊断模式中,所以成为肯定判定,在步骤s48的处理中,将测定信号设定为开启。然后,再次进行步骤s81至步骤s93的处理,检测目标辊位置变更后的状态下的转矩值。
[0185]
并且,在步骤s95的处理中,在判断为在轿厢可移动范围外的情况下(步骤s95的否定判定),实施步骤s101的处理。再有,在步骤s96的处理中,在判断为测定已完成的情况下(步骤s96的肯定判定),主动控制装置50将正方向测定中信号关闭(步骤s101)。
[0186]
接下来,主动控制装置50将可动范围的中心位置信息设定为目标辊位置(步骤s102)。由此,当接下来轿厢2在该层停靠时,辊位置移动至主动辊式导向件12的可动范围的中心位置。然后,主动控制装置50将负方向测定中信号开启(步骤s103)。
[0187]
接下来,主动控制装置50将测定信号关闭(步骤s98),返回至步骤s83的处理。由于测定信号关闭,所以在步骤s83的处理中成为否定判定,如图22所示,动作结束。然后,当轿厢2再次在该层停靠时,在图12所示的步骤s42的处理中,主动控制装置50使导辊21a、21b、21c移动至在步骤s102的处理中设定的目标辊位置。
[0188]
并且,由于将负方向测定中信号设定为开启,所以步骤s81的处理成为肯定判定,不实施步骤s82的处理。因此,在正方向测定中信号关闭的状态下,实施步骤s83至步骤s93的处理。
[0189]
而且,由于正方向测定中信号关闭,所以步骤s94的处理成为否定判定,实施图21所示的步骤s105的处理。如图21所示,在步骤s105的处理中,主动控制装置50判断从前次的目标辊位置起向负方向移动预定量(0.5mm)后的位置是否在轿厢可移动范围以内。
[0190]
然后,在步骤s105的处理中,在判断为在轿厢可移动范围以内的情况下(步骤s195的肯定判定),电梯控制盘190进行步骤s106的处理。在步骤s106的处理中,判断通过步骤s105的处理而移动后的辊位置是否是已完成测定门马达71的开闭动作时的转矩值的辊位置。
[0191]
在步骤s106的处理中,在判断为是测定未进行的辊位置的情况下(步骤s106的否定判定),进行步骤s107的处理。在步骤s107的处理中,电梯控制盘190将使当前的目标辊位置向负方向移动预定量(0.5mm)后的辊位置作为目标辊位置,并作为当前轿厢2正停靠的层的楼层数据而登记。并且,主动控制装置50将已登记的目标辊位置存储于存储部53。
[0192]
接下来,主动控制装置50将测定信号关闭(步骤s108),实施图22所示的步骤s121的处理。在步骤s121的处理中,判断自动运转诊断模式是否解除。在步骤s121的处理中,在主动控制装置50判断为自动运转诊断模式未解除的情况下(步骤s102的否定判定),返回至步骤s83的处理。
[0193]
由于测定信号关闭,所以在步骤s83的处理中成为否定判定,如图22所示,动作结束。然后,当轿厢2再次在该层停靠时,在图12所示的步骤s42的处理中,主动控制装置50使导辊21a、21b、21c移动至在步骤s107的处理中设定的目标辊位置。
[0194]
此外,在步骤s47的处理中,由于处于自动运转诊断模式中,所以成为肯定判定,在
步骤s48的处理中,将测定信号设定为开启。然后,再次进行步骤s81至步骤s93的处理,检测目标辊位置变更后的状态下的转矩值。
[0195]
并且,在步骤s105的处理中,在判断为在轿厢可移动范围外的情况下(步骤s105的否定判定),实施步骤s111的处理。再有,在步骤s106的处理中,在判断为测定已完成的情况下(步骤s106的肯定判定),主动控制装置50将负方向测定中信号关闭(步骤s111)。
[0196]
接下来,主动控制装置50将可动范围的中心位置信息设定为目标辊位置(步骤s112)。由此,当接下来轿厢2在该楼层停靠时,辊位置移动至主动辊式导向件12的可动范围的中心位置。然后,主动控制装置50解除自动运转诊断模式(步骤s113)。
[0197]
根据该自动运转诊断模式,能够一边使轿厢2正常运转,一边获取每个辊位置的转矩值信息。
[0198]
接下来,主动控制装置50将测定信号关闭(步骤s108),实施图22所示的步骤s121的处理。在步骤s121的处理中,在判断为自动运转诊断模式解除的情况下(步骤s121的肯定判定),电梯控制盘190检索存储部196所存储的转矩值信息中的在正方向测定中最小的转矩值。然后,电梯控制盘190检索成为最小的转矩值的辊位置信息(步骤s122)。
[0199]
接下来,电梯控制盘190检索存储部196所存储的转矩值信息中的在负方向测定中最小的转矩值。然后,电梯控制盘190检索成为最小的转矩值的辊位置信息(步骤s123)。
[0200]
接下来,电梯控制盘190计算在步骤s122及步骤s123的处理中检索到的辊位置的正方向和负方向的平均值(步骤s124)。即,在步骤s124的处理中,与步骤s73相同,计算在步骤s122和步骤s123的处理中检索到的辊位置的中心位置。
[0201]
接下来,电梯控制盘190判断此次的辊位置的转矩值是否比前次的辊位置的转矩值小(步骤s125)。前次的辊位置的转矩值是在前次的自动运转诊断模式中设定的辊位置的转矩值。并且,此次的辊位置的转矩值是在此次的自动运转诊断模式中测定出的转矩值中的最小的转矩值。即,对在步骤s122及步骤s172中考虑的转矩值中的较小的转矩值进行设定。
[0202]
在步骤s125的处理中,在判断为此次的辊位置的转矩值较小的情况下(步骤s125的肯定判定),主动控制装置50将此次测定出的辊位置存储于存储部53(步骤s126)。此处,此次测定出的辊位置是在步骤s124的处理中计算出的辊位置。
[0203]
并且,在步骤s125的处理中,在判断为前次的辊位置的转矩值较小的情况下(步骤s125的否定判定),主动控制装置50将前次测定出的辊位置存储于存储部53(步骤s127)。
[0204]
然后,主动控制装置50将轿厢2在当前的楼层停靠时的辊位置设定为在存储部53中存储的辊位置(步骤s128)。由此,使用自动运转诊断模式的辊位置、即轿厢位置探索动作完成。其结果,能够更新门马达71的转矩值最小的辊位置,从而能够防止门马达71产生过载异常。再有,根据自动运转诊断模式,能够一边使电梯1正常运转,一边自动地诊断、探索轿厢位置。
[0205]
对于上述动作而言,可以同时实施针对第一方向x和第二方向y的辊位置的设定以及转矩值的测定,或者也可以分别针对第一方向x和第二方向y实施。或者,也可以仅在第一方向x及第二方向y中的一个方向上实施辊位置的设定以及转矩值的测定。
[0206]
并且,在上述的实施方式例中,对主动控制装置50实施各种信号(旗标)的开启、关闭的判断的例子进行了说明,但不限定于此,也可以由电梯控制盘190实施。并且,也可以由
控制轿厢2整体的轿厢侧控制部15实施。
[0207]
本发明不限定于在上文中说明且图中示出的实施方式,在不脱离权利要求书所记载的发明的主旨的范围内能够实施各种变形。
[0208]
此外,在本说明书中,使用了“平行”以及“正交”等用语,但它们并非仅意味着严格的“平行”以及“正交”,还可以是包括“平行”以及“正交”,并且能够发挥其功能的范围内的“大致平行”、“大致正交”的状态。
[0209]
符号的说明
[0210]
1—电梯,2—轿厢,3—导轨,10—轿厢室,11—门,12—主动辊式导向件,13—轿厢侧卡合部,15—轿厢侧控制部,21a、21b、21c—导辊,22、24—驱动机构,31—辊驱动用马达,50—主动控制装置(控制部),51、61—控制器,52、62—运算部,53—存储部,54、64—马达电流检测器,55、65—输入输出电路,56、66—a/d转换器,60—门控制装置(控制部),71—门马达,81—加速度传感器,100—卷扬机,130—绳索,190—电梯控制盘(控制部),191—电源,192—停靠位置信息获取部,193—停止位置信息获取部,194—保养模式输入信号输出部,195—主动动作允许信号输出部,196—存储部,197—门马达转矩值信息获取部,198—门开闭指令信号输出部,200—升降通道,201—层站区,202—出入口,203—建筑物侧门,204—建筑物侧卡合部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1