一种全自动垃圾分类收集处理设备的制作方法
1.本发明涉及环保技术领域,特别涉及一种全自动垃圾分类收集处理设备。
背景技术:
2.现在不管是大城市还是小城镇,垃圾桶已经成为维护环境不可或缺的东西,垃圾分类处理也已经成为我们生活的一部分,然而,目前情况下,还需要居民将分类好的垃圾扔进指定的垃圾桶,垃圾车装垃圾时,需要工作人员将垃圾桶推到垃圾车后, 将垃圾桶固定好,垃圾车才能将垃圾桶内的垃圾倒入车内,这样既浪费人工,垃圾的细菌也不利用工作人员的身体健康,因此需要一种全自动垃圾分类收集处理设备,来代替人工,既提高了工作效率,又节约成本,还保障了工作人员的健康。
技术实现要素:
3.针对上述技术问题,通过本发明实现了垃圾的分类装车,全程无需人工,节省了人力,提高了工作效率。当居民将垃圾扔到传送带上,并按动桶盖上的按钮,选择垃圾种类后,将垃圾移动到指定的垃圾分类箱孔处;当垃圾移动到指定的垃圾分类箱孔处时,该处的支撑架及其上机构开始工作,弹杆的力将该处的垃圾推到垃圾桶内,实现了垃圾的自主装箱;通过提升机构夹住卡槽,卡槽向内滑动,皮带轮b带动长杆向下移动,桶盖一端受到长杆作用,另一端向上移动,从而完成桶身的开盖;完全解放人工,实现全自动的垃圾桶开盖;通过电机转动,带动齿轮b转动将指定垃圾绞碎,节约了存放空间,也为垃圾发酵再利用提供条件。
4.本发明所使用的技术方案是:一种全自动垃圾分类收集处理设备,包括垃圾车、绞碎机、提升机构和可分类垃圾桶;所述的垃圾车包括车架、车后板、滑道和储存箱;所述的车架为车身;车后板转动安装在车架后,可开合,供储存箱内的物品倒出;滑道安装在储存箱上,滑道下端的开口与储存箱上的开口吻合;储存箱有提升机构个, 储存箱安装在车架上,储存箱为空壳,储存箱内部存放分类处理好的垃圾;储存箱内部安装有推动装置,可将储存箱内的垃圾推出;起到存放搬运垃圾的作用,节省了人力物力;所述的垃圾车可行走,可装载垃圾;绞碎机安装在垃圾车上,可绞碎厨余;提升机构安装在垃圾车的后面,提升机构起到夹紧物体并提起的作用;可分类垃圾桶放置在地上,并将分类垃圾放置到指定桶内。
5.优选地,所述的绞碎机包括机箱、刀片、圆轴a、圆轴b、齿轮a、齿轮b和电机a;所述的机箱固定安装在中间的储存箱上,机箱下端的开口与储存箱上的开口吻合;圆轴a和圆轴b上设有刀片;圆轴a转动安装在机箱上的圆孔内;圆轴b转动安装在机箱上的圆孔内;齿轮a固定安装在圆轴a上;齿轮b固定安装在圆轴b上;电机a固定安装在中间的储存箱上, 其电机轴与齿轮b固定连接;齿轮a与齿轮b相互啮合;当电机a转动时,带动齿轮b转动进而带动圆轴b转动,从而带动圆轴b上的刀片转动,齿轮b又带动齿轮a转动,进而带动圆轴a转动,从而带动圆轴a上的刀片转动,可将指定垃圾绞碎,节约了存放空间,也为垃圾发酵再利用提供条件。
6.优选地,所述的提升机构包括提升部分、衔接板、小板、齿轮c、齿轮d、带齿杆、左带齿夹、右带齿夹和电机b;所述的提升部分有两个,提升部分固定安装在车架后面;衔接板固定安装在俩个提升部分中间;小板固定安装在衔接板上;齿轮c转动安装在小板上的圆柱上;齿轮d转动安装在小板上的圆柱上;带齿杆滑动安装在小板上,带齿杆与齿轮c和齿轮d啮合;左带齿夹滑动安装在小板上,左带齿夹与齿轮c啮合;右带齿夹滑动安装在小板上,右带齿夹与齿轮d啮合;电机b固定安装在衔接板上,其电机轴与齿轮d固定连接;当电机b转动时,带动齿轮d转动,进而带动带齿杆前后移动,齿轮d又带动右带齿夹前后移动,带齿杆带动齿轮c转动,齿轮c带动左带齿夹前后移动,实现了提升机构的夹紧和松开垃圾桶的动作;提升部分上的电机转动带动提升部分与衔接板连接的一端提升下降,从而使被夹住的垃圾桶提升与下降,将垃圾桶内的垃圾倒入与滑道相对应的开口内,实现了自动化装运垃圾,节省了人力,节约了成本,提高了工作效率。
7.优选地,所述的可分类垃圾桶包括底座、桶身、桶盖、卡槽、弹簧a、斜面杆、伸缩柱、电机c、齿轮e、齿轮f、圆形支柱、皮带轮a、皮带轮b、长杆和皮带;所述的底座放置在地上,底座上设有凹槽;桶身放置在底座内,桶身两侧面设有凹槽,后面设有小孔,桶身与底座通过卡扣连接;桶盖安装在底座上,盖在桶身上;卡槽有两个,卡槽分别滑动安装在桶身内;弹簧a一端与卡槽固定连接,另一端与桶身固定连接;斜面杆滑动安装在桶身上的小孔内;伸缩柱固定安装在底座上,伸缩柱内设有弹簧,弹簧起到拉动伸缩柱上的滑杆的作用;伸缩柱的滑杆上有小凸块;电机c固定安装在底座上,其电机轴与齿轮e固定连接;齿轮e有两个,一个转动安装在伸缩柱上,一个与电机c固定连接;齿轮f固定安装在圆形支柱上;圆形支柱转动安装在底座上的小孔内;皮带轮a固定安装在圆形支柱上;皮带轮b转动安装在长杆上,皮带轮b内部设有螺纹;长杆一端滑动安装在底座上,另一端与桶盖转动连接,长杆下半部分设有螺纹,与皮带轮b配合;皮带包覆皮带轮a和皮带轮b;当提升机构夹住卡槽,卡槽向内滑动,卡槽上的小凸杆挤压斜面杆前面的斜面,使斜面杆向右移动,斜面杆后端的斜面挤压伸缩柱上的小凸块,使伸缩柱上的滑杆带动伸缩柱上的齿轮e向上移动,伸缩柱上的齿轮e与电机c上的齿轮e和齿轮f啮合;这样,当电机c工作时,就带动齿轮f转动,进而带动圆形支柱转动,进而带动皮带轮a转动,从而通过皮带带动桶盖转动,皮带轮b带动长杆向下移动,桶盖一端受到长杆作用,另一端向上移动,从而完成桶身的开盖;完全解放人工,实现全自动的垃圾桶开盖;优选地,所述的可分类垃圾桶还包括:电机d、皮带轮c、传送带、支撑架、带孔滑块、弹簧b、弹杆、小卡柱、螺母、小卡块、圆杆、弹簧c、电机e和丝杠;电机d固定安装在桶盖内部,其电机轴与一个皮带轮c固定连接;皮带轮c有两个,皮带轮c转动安装子桶盖内部,传送带与皮带轮c滚动配合;当居民将垃圾扔到传送带上,并按动桶盖上的按钮,选择垃圾种类后,电机d工作,带动皮带轮c工作,进而带动传送带转动,将垃圾移动到指定的垃圾分类箱孔处;支撑架及其上面机构有三个,支撑架固定安装在桶盖内部;带孔滑块滑动安装在支撑架上,带孔滑块上设有小孔;弹簧b一端与支撑架固定连接,另一端与带孔滑块固定连接,起到拉动带孔滑块的作用;弹杆固定安装在带孔滑块上;小卡柱固定安装在支撑架上,起到阻挡弹杆的作用;螺母滑动安装在支撑架上,螺母上安装有小凸柱;小卡块固定安装在齿轮e上,起到阻挡圆杆的作用;圆杆滑动安装在带孔滑块的小孔内;弹簧c一端与圆杆固定连接,一端与带孔滑块固定连接;电机e固定安装在支撑架上,其电机轴与丝杠固定连接;丝杠转动
安装在支撑架上,丝杠与螺母螺纹配合;当垃圾移动到指定的垃圾分类箱孔处时,该处的支撑架及其上机构开始工作,电机e启动,带动丝杠转动,进而带动螺母向右移动,螺母上的小凸柱接触圆杆时,由于斜面作用,挤压圆杆向内滑动,螺母继续向右滑动,向左滑动时,螺母上的小凸柱会卡住圆杆,带着带孔滑块向左移动,弹簧b压缩,带孔滑块到达小卡块处时,圆杆被小卡块挡住,弹簧c压缩,螺母可继续向左,带孔滑块则被压缩的弹簧b弹回,小卡柱挡住弹回的弹杆,弹杆的力将该处的垃圾推到垃圾桶内,实现了垃圾的自主装箱。本发明与现有技术相比的有益效果是:1.通过本发明实现了垃圾的分类装车,全程无需人工,节省了人力,提高了工作效率。
8.2.当居民将垃圾扔到传送带上,并按动桶盖上的按钮,选择垃圾种类后,将垃圾移动到指定的垃圾分类箱孔处;3.当垃圾移动到指定的垃圾分类箱孔处时,该处的支撑架及其上机构开始工作,弹杆的力将该处的垃圾推到垃圾桶内,实现了垃圾的自主装箱。
9.4.通过提升机构夹住卡槽,卡槽向内滑动,皮带轮b带动长杆向下移动,桶盖一端受到长杆作用,另一端向上移动,从而完成桶身的开盖;完全解放人工,实现全自动的垃圾桶开盖;5.通过电机转动,带动齿轮b转动将指定垃圾绞碎,节约了存放空间,也为垃圾发酵再利用提供条件。
附图说明
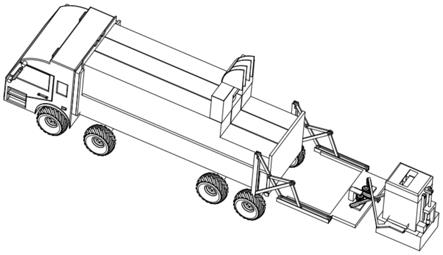
10.图1
‑
3为本发明的整体结构示意图。
11.图4为本发明的垃圾车结构示意图。
12.图5、图6为本发明绞碎机结构示意图。
13.图7为本发明的提升机构示意图。
14.图8
‑
13为本发明的可分类垃圾桶示意图。
15.附图标号1
‑
垃圾车;2
‑
绞碎机;3
‑
提升机构;4
‑
可分类垃圾桶;101
‑
车架;102
‑
车后板;103
‑
滑道;104
‑
储存箱;201
‑
机箱;202
‑
刀片;203
‑
圆轴a;204
‑
圆轴b;205
‑
齿轮a;206
‑
齿轮b;207
‑
电机a;301
‑
提升部分;302
‑
衔接板;303
‑
小板;304
‑
齿轮c;305
‑
齿轮d;306
‑
带齿杆;307
‑
左带齿夹;308
‑
右带齿夹;309
‑
电机b;401
‑
底座;402
‑
桶身;403
‑
桶盖;404
‑
卡槽;405
‑
弹簧a;406
‑
斜面杆;407
‑
伸缩柱;408
‑
电机c;409
‑
齿轮e;410
‑
齿轮f;411
‑
圆形支柱;412
‑
皮带轮a;413
‑
皮带轮b;414
‑
长杆;415
‑
皮带;416
‑
电机d;417
‑
皮带轮c;418
‑
传送带;419
‑
支撑架;420
‑
带孔滑块;421
‑
弹簧b;422
‑
弹杆;423
‑
小卡柱;424
‑
螺母;425
‑
小卡块;426
‑
圆杆;427
‑
弹簧c;428
‑
电机e;429
‑
丝杠。
16.具体实施方式
17.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明能够以很多不同于在此
描述的其它方式来实施,本领域技术人员能够在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
18.在本发明的描述中,需要说明的是,术语“上”、“下”、
ꢀ“
前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
19.请参阅图1
‑
13所示,一种全自动垃圾分类收集处理设备,包括垃圾车1、绞碎机2、提升机构3和可分类垃圾桶4;垃圾车1包括车架101、车后板102、滑道103和储存箱104;车架101为车身;车后板102转动安装在车架101后,可开合,供储存箱104内的物品倒出;滑道103安装在储存箱104上,滑道103下端的开口与储存箱104上的开口吻合;储存箱104有提升机构3个, 储存箱104安装在车架101上,储存箱104为空壳,储存箱104内部存放分类处理好的垃圾;储存箱104内部安装有推动装置,可将储存箱104内的垃圾推出;起到存放搬运垃圾的作用,节省了人力物力;垃圾车1可行走,可装载垃圾;绞碎机2安装在垃圾车1上,可绞碎厨余;提升机构3安装在垃圾车1的后面,提升机构3起到夹紧物体并提起的作用;可分类垃圾桶4放置在地上,并将分类垃圾放置到指定桶内。
20.本发明实施例的一个可选实施方式中,除与上一个实施例相同的零件外,绞碎机2包括机箱201、刀片202、圆轴a203、圆轴b204、齿轮a205、齿轮b206和电机a207;机箱201固定安装在中间的储存箱104上,机箱201下端的开口与储存箱104上的开口吻合;圆轴a203和圆轴b204上设有刀片202;圆轴a203转动安装在机箱201上的圆孔内;圆轴b204转动安装在机箱201上的圆孔内;齿轮a205固定安装在圆轴a203上;齿轮b206固定安装在圆轴b204上;电机a207固定安装在中间的储存箱104上, 其电机轴与齿轮b206固定连接;齿轮a205与齿轮b206相互啮合;当电机a207转动时,带动齿轮b206转动进而带动圆轴b204转动,从而带动圆轴b204上的刀片202转动,齿轮b206又带动齿轮a205转动,进而带动圆轴a203转动,从而带动圆轴a203上的刀片202转动,可将指定垃圾绞碎,节约了存放空间,也为垃圾发酵再利用提供条件。
21.本发明实施例的一个可选实施方式中,除与上一个实施例相同的零件外,提升机构3包括提升部分301、衔接板302、小板303、齿轮c304、齿轮d305、带齿杆306、左带齿夹307、右带齿夹308和电机b309;提升部分301有两个,提升部分301固定安装在车架101后面;衔接板302固定安装在俩个提升部分301中间;小板303固定安装在衔接板302上;齿轮c304转动安装在小板303上的圆柱上;齿轮d305转动安装在小板303上的圆柱上;带齿杆306滑动安装在小板303上,带齿杆306与齿轮c304和齿轮d305啮合;左带齿夹307滑动安装在小板303上,左带齿夹307与齿轮c304啮合;右带齿夹308滑动安装在小板303上,右带齿夹308与齿轮d305啮合;电机b309固定安装在衔接板302上,其电机轴与齿轮d305固定连接;当电机b309转动时,带动齿轮d305转动,进而带动带齿杆306前后移动,齿轮d305又带动右带齿夹308前后移动,带齿杆306带动齿轮c304转动,齿轮c304带动左带齿夹307前后移动,实现了提升机构3的夹紧和松开垃圾桶的动作;提升部分301上的电机转动带动提升部分301与衔接板302连接的一端提升下降,从而使被夹住的垃圾桶提升与下降,将垃圾桶内的垃圾倒入与滑道103相对应的开口内,实现了自动化装运垃圾,节省了人力,节约了成本,提高了工作效率。
22.本发明实施例的一个可选实施方式中,除与上一个实施例相同的零件外,可分类垃圾桶4包括底座401、桶身402、桶盖403、卡槽404、弹簧a405、斜面杆406、伸缩柱407、电机c408、齿轮e409、齿轮f410、圆形支柱411、皮带轮a412、皮带轮b413、长杆414和皮带415;底座401放置在地上,底座401上设有凹槽;桶身402放置在底座401内,桶身402两侧面设有凹槽,后面设有小孔,桶身402与底座401通过卡扣连接;桶盖403安装在底座401上,盖在桶身402上;卡槽404有两个,卡槽404分别滑动安装在桶身402内;弹簧a405一端与卡槽404固定连接,另一端与桶身402固定连接;斜面杆406滑动安装在桶身402上的小孔内;伸缩柱407固定安装在底座401上,伸缩柱407内设有弹簧,弹簧起到拉动伸缩柱407上的滑杆的作用;伸缩柱407的滑杆上有小凸块;电机c408固定安装在底座401上,其电机轴与齿轮e409固定连接;齿轮e409有两个,一个转动安装在伸缩柱407上,一个与电机c408固定连接;齿轮f410固定安装在圆形支柱411上;圆形支柱411转动安装在底座401上的小孔内;皮带轮a412固定安装在圆形支柱411上;皮带轮b413转动安装在长杆414上,皮带轮b413内部设有螺纹;长杆414一端滑动安装在底座401上,另一端与桶盖403转动连接,长杆414下半部分设有螺纹,与皮带轮b413配合;皮带415包覆皮带轮a412和皮带轮b413;当提升机构3夹住卡槽404,卡槽404向内滑动,卡槽404上的小凸杆挤压斜面杆406前面的斜面,使斜面杆406向右移动,斜面杆406后端的斜面挤压伸缩柱407上的小凸块,使伸缩柱407上的滑杆带动伸缩柱407上的齿轮e409向上移动,伸缩柱407上的齿轮e409与电机c408上的齿轮e409和齿轮f410啮合;这样,当电机c408工作时,就带动齿轮f410转动,进而带动圆形支柱411转动,进而带动皮带轮a412转动,从而通过皮带415带动桶盖403转动,皮带轮b413带动长杆414向下移动,桶盖403一端受到长杆414作用,另一端向上移动,从而完成桶身402的开盖;完全解放人工,实现全自动的垃圾桶开盖;本发明实施例的一个可选实施方式中,除与上一个实施例相同的零件外,可分类垃圾桶4还包括:电机d416、皮带轮c417、传送带418、支撑架419、带孔滑块420、弹簧b421、弹杆422、小卡柱423、螺母424、小卡块425、圆杆426、弹簧c427、电机e428和丝杠429;电机d416固定安装在桶盖403内部,其电机轴与一个皮带轮c417固定连接;皮带轮c417有两个,皮带轮c417转动安装子桶盖403内部,传送带418与皮带轮c417滚动配合;当居民将垃圾扔到传送带418上,并按动桶盖403上的按钮,选择垃圾种类后,电机d416工作,带动皮带轮c417工作,进而带动传送带418转动,将垃圾移动到指定的垃圾分类箱孔处;支撑架419及其上面机构有三个,支撑架419固定安装在桶盖403内部;带孔滑块420滑动安装在支撑架419上,带孔滑块420上设有小孔;弹簧b421一端与支撑架419固定连接,另一端与带孔滑块420固定连接,起到拉动带孔滑块420的作用;弹杆422固定安装在带孔滑块420上;小卡柱423固定安装在支撑架419上,起到阻挡弹杆422的作用;螺母424滑动安装在支撑架419上,螺母424上安装有小凸柱;小卡块425固定安装在齿轮e409上,起到阻挡圆杆426的作用;圆杆426滑动安装在带孔滑块420的小孔内;弹簧c427一端与圆杆426固定连接,一端与带孔滑块420固定连接;电机e428固定安装在支撑架419上,其电机轴与丝杠429固定连接;丝杠429转动安装在支撑架419上,丝杠429与螺母424螺纹配合;当垃圾移动到指定的垃圾分类箱孔处时,该处的支撑架419及其上机构开始工作,电机e428启动,带动丝杠429转动,进而带动螺母424向右移动,螺母424上的小凸柱接触圆杆426时,由于斜面作用,挤压圆杆426向内滑动,螺母424继续向右滑动,向左滑动时,螺母424上的小凸柱会卡住圆杆426,带着带孔滑块420向左
移动,弹簧b421压缩,带孔滑块420到达小卡块425处时,圆杆426被小卡块425挡住,弹簧c427压缩,螺母424可继续向左,带孔滑块420则被压缩的弹簧b421弹回,小卡柱423挡住弹回的弹杆422,弹杆422的力将该处的垃圾推到垃圾桶内,实现了垃圾的自主装箱。
23.工作原理:当居民将垃圾扔到传送带418上,并按动桶盖403上的按钮,选择垃圾种类后,电机d416工作,带动皮带轮c417工作,进而带动传送带418转动,将垃圾移动到指定的垃圾分类箱孔处;当垃圾移动到指定的垃圾分类箱孔处时,该处的支撑架419及其上机构开始工作,电机e428启动,带动丝杠429转动,进而带动螺母424向右移动,螺母424上的小凸柱接触圆杆426时,由于斜面作用,挤压圆杆426向内滑动,螺母424继续向右滑动,向左滑动时,螺母424上的小凸柱会卡住圆杆426,带着带孔滑块420向左移动,弹簧b421压缩,带孔滑块420到达小卡块425处时,圆杆426被小卡块425挡住,弹簧c427压缩,螺母424可继续向左,带孔滑块420则被压缩的弹簧b421弹回,小卡柱423挡住弹回的弹杆422,弹杆422的力将该处的垃圾推到垃圾桶内,实现了垃圾的自主装箱,杜绝了垃圾杂乱现象,起到保持环境卫生的作用;搬运垃圾时,将垃圾车1开到一定位置,提升机构3放下,电机b309工作,带动齿轮d305转动,进而带动带齿杆306前后移动,齿轮d305又带动右带齿夹308前后移动,带齿杆306带动齿轮c304转动,齿轮c304带动左带齿夹307前后移动,实现了提升机构3的夹紧和松开垃圾桶的动作;当提升机构3夹住卡槽404,卡槽404向内滑动,卡槽404上的小凸杆挤压斜面杆406前面的斜面,使斜面杆406向右移动,斜面杆406后端的斜面挤压伸缩柱407上的小凸块,使伸缩柱407上的滑杆带动伸缩柱407上的齿轮e409向上移动,伸缩柱407上的齿轮e409与电机c408上的齿轮e409和齿轮f410啮合;这样,当电机c408工作时,就带动齿轮f410转动,进而带动圆形支柱411转动,进而带动皮带轮a412转动,从而通过皮带415带动桶盖403转动,皮带轮b413带动长杆414向下移动,桶盖403一端受到长杆414作用,另一端向上移动,从而完成桶身402的开盖;完全解放人工,实现全自动的垃圾桶开盖;提升部分301上的电机转动带动提升部分301与衔接板302连接的一端提升下降,从而使被夹住的垃圾桶提升与下降,将垃圾桶内的垃圾倒入与滑道103相对应的开口内,实现了自动化装运垃圾,节省了人力,节约了成本,提高了工作效率。当厨余垃圾倒入后,电机a207工作,带动齿轮b206转动,进而带动圆轴b204转动,从而带动圆轴b204上的刀片202转动,齿轮b206又带动齿轮a205转动,进而带动圆轴a203转动,从而带动圆轴a203上的刀片202转动,可将指定垃圾绞碎,节约了存放空间,也为垃圾发酵再利用提供条件,垃圾车储存足够量需要卸到垃圾站时,车后板102打开,储存箱104内部的推动装置启动,将储存箱104内的垃圾推出,完成垃圾的搬运传输,节省人力物力,提高工作效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1