一种高速双驱动堆垛机的制作方法
1.本发明属于自动化立体仓储技术领域,特别涉及一种高速双驱动堆垛机。
背景技术:
2.随着自动化仓储物流系统的发展,客户对物流设备的运行效率要求也来越高,传统结构配置的堆垛机系统越来越无法满足实际的要求。为了满足客户对整个物理系统的效率要求,有效提高堆垛机的运行效率,急需一种采用双伺服电机驱动形式、配备轻载机身结构、并设置高精度行走轮的堆垛机。
技术实现要素:
3.针对上述问题,本发明的目的在于提供一种高速双驱动堆垛机,能够有效保证堆垛机的定位精度,进而提高整体物流仓储系统的效率,满足高效率存储的要求。
4.为了实现上述目的,本发明采用以下技术方案:
5.一种高速双驱动堆垛机,包括主体框架、载货台及双驱动行走机构,其中载货台设置于主体框架上且可升降;所述双驱动行走机构设置于所述主体框架的底部,所述双驱动行走机构可驱动所述主体框架在地轨上行走。
6.所述主体框架包括下横梁、立柱及上横梁,其中下横梁和上横梁通过两个立柱连接,所述载货台设置于两个立柱之间;所述双驱动行走机构设置于所述下横梁上。
7.所述双驱动行走机构包括两个电机驱动装置;两个所述电机驱动装置分别设置于所述下横梁两端。
8.所述电机驱动装置包括行走轮、轮箱、电机轴、驱动电机及扭力臂,其中轮箱设置于所述下横梁上,所述行走轮设置于轮箱内,用于在地轨上行走;所述驱动电机通过扭力臂与所述轮箱连接,所述驱动电机的电机轴与所述行走轮连接。
9.所述轮箱的两侧连接有导向轮组,所述导向轮组与所述地轨的两侧接触,起到导向的作用。
10.所述下横梁包括下横梁体及设置于所述下横梁体两侧的电气保护装置和集电器组件;所述电气保护装置用于限制堆垛机的行走速度;所述集电器组件用于为堆垛机供电。
11.所述立柱包括依次连接的下立柱、连接框架及上立柱,其中下立柱通过下连接座与所述下横梁连接;所述上立柱通过上连接座与所述上横梁连接。
12.所述立柱的内侧设有减速角钢;所述载货台通过导向轮与所述减速角钢接触。
13.所述载货台包括左支臂、右支臂、底盘及货叉,其中底盘的两端分别设有左支臂和右支臂,所述左支臂和右支臂通过滚轮在两个立柱上设有的升降导轨上行走;所述货叉设置于所述底盘上。
14.所述立柱的外侧设有踏板护栏。
15.本发明的优点及有益效果是:
16.本发明通过采用双电机驱动堆垛机,具有运行平稳,能够提供加大的加速度,在短
时间快速提高运行速度的特点;
17.本发明为了解决定位精度的问题,采用伺服电机,具有位置精确可靠的特点;
18.本发明利用电机同步控制系统,保证电机启停和转速一致;
19.本发明立柱采用定制铝合金立柱,具有惯性矩大、质量轻,整体堆垛机结构简单,质量轻、易于到达高加速度以及高速度,有利于降低整体惯性。
附图说明
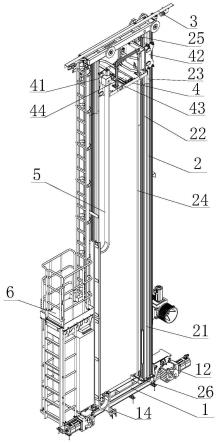
20.图1为本发明一种高速双驱动堆垛机的轴测图;
21.图2为本发明中下横梁的轴测图;
22.图3为本发明中电机驱动装置的轴测图。
23.图中:1为下横梁,2为立柱,3为上横梁,4为载货台,5为拖链系统,6为踏板护栏,11为下横梁体,12为电机驱动装置,13为导向轮组,14为电气保护装置,15为集电器组件,21为下立柱,22为连接框架,23为上立柱,24为减速角钢,25为上连接座,26为下连接座,41为左支臂,42为右支臂,43为底盘,44为货叉,121为轮箱,122为电机轴,123为驱动电机,124为扭力臂。
具体实施方式
24.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
25.如图1所示,本发明提供的一种高速双驱动堆垛机,包括主体框架、载货台4及双驱动行走机构,其中载货台4设置于主体框架上且可升降;双驱动行走机构设置于主体框架的底部,双驱动行走机构可驱动主体框架在地轨上高速行走。
26.本发明的实施例中,主体框架包括下横梁1、立柱2及上横梁3,其中下横梁1和上横梁3通过两个立柱2连接,载货台4设置于两个立柱2之间;双驱动行走机构设置于下横梁1上。
27.具体地,立柱2包括依次连接的下立柱21、连接框架22及上立柱23,其中下立柱21通过下连接座26与下横梁1连接;上立柱23通过上连接座25与上横梁3连接。
28.进一步地,立柱2的内侧设有减速角钢24;载货台4通过导向轮与减速角钢24接触。载货台4上具有拉断绳保护,通过减速角钢24保证安全。
29.本发明的实施例中,载货台4包括左支臂41、右支臂42、底盘43及货叉44,其中底盘43的两端分别设有左支臂41和右支臂42,左支臂41和右支臂42通过滚轮在两个立柱2上设有的升降导轨上行走;货叉44设置于底盘43上,主要作用承接货物,可垂直行走。立柱2上还设有与载货台4连接的拖链系统5,拖链系统5可随载货台4垂直升降,用于供电以及信号传输。
30.进一步地,立柱2的外侧设有踏板护栏6,用于维护堆垛机。
31.如图2所示,本发明的实施例中,下横梁1包括下横梁体11及设置于下横梁体11两侧的电气保护装置14和集电器组件15;电气保护装置14用于限制堆垛机的行走速度,行走过程中保护失速的堆垛机;集电器组件15用于为堆垛机供电,采用一维条码带进行认址识别。双驱动行走机构包括两个电机驱动装置12,两个电机驱动装置12分别设置于下横梁1两
端。
32.具体地,电气保护装置14安装在下横梁体11的一侧,采用行程开关以及槽型传感器限制堆垛机行走速度,保护堆垛机行走安全;集电器组件15螺接在下横梁体11的另一侧,通过滑触线为堆垛机供电,通过读取条码带数据实现堆垛机行走的绝对认址。
33.如图3所示,本发明的实施例中,电机驱动装置12包括行走轮、轮箱121、电机轴122、驱动电机123及扭力臂124,其中轮箱121设置于下横梁1上,行走轮设置于轮箱121内,用于在地轨上行走;驱动电机123通过扭力臂124与轮箱121连接,驱动电机123的电机轴122与行走轮连接。
34.具体地,轮箱121为铸造箱体精加工后安装聚氨酯轮;电机轴122采用合金结构钢精加工,用于连接轮箱121与驱动电机123;驱动电机123为伺服电机,双电机同步扭矩驱动,扭力臂124为预制板材精加工件,用于固定驱动电机123,此种结构简单,控制方便。
35.进一步地,轮箱121的两侧连接有导向轮组13,导向轮组13与地轨的两侧接触,起到导向的作用。
36.本发明的实施例中,立柱2采用特制铝合金立柱,具有质量轻、惯性矩大的特点,进而使堆垛机质量轻,刚度大。
37.本发明的工作原理为:
38.本发明的堆垛机的主体支撑部件为下横梁1,其下面安装双伺服电机驱动机构,用于实现堆垛机导向行走功能,采用双伺服电机驱动能够使堆垛机在启动和停止时的加速度提高两倍;轮箱121中轮子的材质为聚氨酯,能够提高轮子的摩擦系数,不但可以提高堆垛机启动和停止时的摩擦力,还可以避免轮子打滑,保证堆垛机的定位精度;立柱2为铝合金特制,材质轻便,能有效的降低堆垛机启动和停止时的惯性,通过螺栓同下横梁1以及上横梁3连接,为载货台4提供导向支撑;通过滑轮及钢丝绳提升载货台4,载货,4为堆垛机主要承载货物部件,安装有货叉44,用于取放货物;拖链系统5可随载货台4垂直升降,用于供电以及信号传输;踏板护栏6为钢结构焊接件,固定在下横梁1上,用于维护堆垛机。
39.本发明能够提供一种高加速度高速度运行,并有效保证定位精度的堆垛机,其能够有效提高堆垛机运行效率和整体物流存储效率。本发明应用于自动化立体仓储系统中,也可应用于其它自动化车间的物流系统中。
40.以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1