一种非接触式冷链集装箱掏箱消毒装卸智能装备的制作方法
1.本发明是专门用于集装箱卸货和装货时的一种利用agv叉车及人工智能技术整合了掏箱消毒于一体的装卸装备,属于港口装卸人工智能自动化领域。具体涉及一种为防疫冷冻集装箱进口冷链货物携带病毒非接触式冷链集装箱掏箱消毒装卸智能装备。
背景技术:
2.随着计算机技术的快速发展,激光扫描器、视觉传感器、超声波扫描器、磁条识别器等各类技术(以下简称智能传感器)促使人工智能机器人得到了长足发展,特别是在物流、工业领域的各类agv叉车和智能机械手随处可见。 agv(automated guided vehicles)又名无人搬运车或自动导航车。其显著特点的是无人驾驶,agv叉车上装备有自动导向系统,可以保障系统在不需要人工引航的情况下就能够沿预定的路线自动行驶,将货物自动从起始点运送到目的地并能举升一定高度存取货物。agv叉车的另一个特点是柔性好,自动化程度高和智能化水平高,agv叉车的行驶路径可以根据仓储货位要求、生产工艺流程等改变而灵活改变。agv叉车配备有装卸和提升机构,可以与其他物流设备自动接口,实现货物装卸与搬运全过程自动化。此外,agv叉车还具有清洁生产的特点,agv 叉车依靠自带的蓄电池提供动力,运行过程中无噪声、无污染,可以应用在许多要求工作环境清洁的场所。真空泵系统及吸盘、直线伺服电机和永磁同步伺服曳引机技术已经十分成熟,被广泛应用在机械手抓取货物和提升货物等场景中,大大提高作业效率。但是在港口集装箱运输的拆箱和装箱作业中依然为人工,不仅效率低劳动强度大成本高。
3.本发明人于2020年12月16日向国家知识产权局提交的一种agv掏箱消毒码垛车发明申请书(申请号202011481817.7)公开了一种基于agv车的用多轴机械手通过吸盘抓取货物的方式实现掏箱消毒码垛的功能,该发明所称多轴机械手由于在集装箱内作业空间受限及一次抓取的数量有限导致卸货和装货效率较低。
4.本发明人根据客户需求调研情况,开发设计了一种非接触式冷冻集装箱掏箱消毒装卸智能装备,融合了agv叉车技术、水平推拉技术和三维视觉传感器、二维视觉传感器、激光传感器、光电传感器、超声波传感器、磁条识别器、二维码识别器等技术,并在装卸货属具上增加了几个必要的理货机构,大大提高了卸货和装货的效率,是一款更加实用更加高效的港口集装箱拆箱装箱的神器。
技术实现要素:
5.本发明的目的在于提供一种非接触式冷冻集装箱掏箱消毒装卸智能装备,人工装卸冷冻集装箱货物时,容易导致装卸工人感染的问题。本申请采用人工智能技术完成掏箱消毒整个冷冻集装箱卸货和装货工作,避免工人接触传染源,从源头杜绝传染。
6.为了实现上述目的,本发明涉及的一种非接触式冷冻集装箱掏箱消毒装卸智能装备,包括agv叉车、货盘属具、推拉属具、输送机、消毒机和控制平台, agv叉车用于实现与冷冻集装箱的自动对接、步进和叉齿升降,货盘属具固定在 agv叉车两个叉齿上,用于卸货或
装货时接货理货或摆货理货,推拉属具固定在 agv叉车前部且在货盘属具上部,自动进行高度调整用于将货物从冷藏集装箱货位掏出放在货盘属具上进行卸货,或将货物从货盘属具上推入冷藏集装箱货位进行装货,输送机固定在agv叉车一侧或两侧,输送机前端与货盘属具对接,后端与消毒机对接,用于将货物在货盘属具和消毒机之间输送,消毒机固定在 agv叉车的后端用于对货物表面进行全面自动消毒,控制平台分别与agv叉车、货盘属具、推拉属具、输送机和消毒机连接,控制相关部件的协同工作。
7.本发明涉及的货盘属具包括前端的刀片状面板和后端的综合理货平台,横向辊轮传动机构和理货盘构成综合理货平台,与输送机对应,理货盘固定在综合理货平台一侧或两侧,与输送机非接触对接,理货盘包括纵向动力输送辊、被动万向球、电动环状转盘,电动环状转盘固定在理货盘中心位置,若干根纵向动力输送辊等间隔固定在电动环状转盘前后两端,在纵向动力输送辊和电动环状转盘之间以及电动环状转盘中心均匀布置若干个被动万向球,横向辊轮传动机构与理货盘连接为一体。
8.进一步地,在理货盘侧边的框架上固定设置一个推箱器,用于装货时将货物由货盘属具一侧向另一侧或中心推动,推箱器包括液压或电动推杆结构和推板,液压或电动推杆固定连接在理货盘侧边的框架上,推板固定在液压或电动推杆自由端。
9.进一步地,建议在一个(如右侧)理货盘靠近输送机位置设置一个翻箱器,用于装货时将从输送机上转运来的货物向货盘属具外侧翻转90度。
10.本发明涉及的推拉属具包括升降架、升降单元、直线电机、基板、真空泵系统、吸盘和智能传感器,升降单元固定在升降架上,升降单元沿升降架上下运动,固定在升降单元上的直线电机与基板连接,吸盘和智能传感器均固定在基板上,吸盘与真空泵系统连接,所述智能传感器为视频传感器用于采集前方图像数据,获取待掏取货物的位置和高度。
11.具体地,,所述升降单元包括升降架、升降板、配重滑道、配重滑块、永磁同步曳引机和曳绳,升降架的四根立柱均由开口相对的一对槽钢构成且从升降架底部到顶部具有上下活动空间,升降板的前后两端分别置于前后两对由槽钢形成的立柱中间,固定在升降板两端侧面的滑轮嵌入立柱中,左右两侧的配重滑块与固定在升降架内侧左右两边的配重滑道滑动连接,带有两个反方向转动曳引轮的永磁同步伺服曳引机固定在升降架底部,两条分别绕在永磁同步曳引机两个曳引轮上的曳绳分别绕过升降架底部左右两个结构钢中间导向滑轮连接左右两个升降板下端吊钩,另外两条曳绳分别通过升降架顶部左右两个横梁中间导向滑轮一头连接配重滑块一头连接升降板上端吊钩。
12.本发明涉及的输送机包括液压升降装置、输送机主体、插销滚轮和限位滑槽,在agv叉车底盘靠近消毒机前端处固定设置两限位滑槽,对应地,输送机主体后端两侧均固定一插销滚轮,插销滚轮嵌入限位滑槽内与其滑动连接,输送机主体中部通过液压升降装置固定在agv叉车底盘侧边中间位置,输送机主体前端与货盘属具保持非接触式对接。
13.具体地,控制平台包括agv叉车控制系统、货盘属具控制系统、推拉属具控制系统、输送机控制系统、消毒机控制系统和总调度平台,agv叉车控制系统与agv叉车连接,agv叉车控制系统用于agv叉车的调度,发送控制指令给agv 叉车,agv叉车基于接收到的控制指令控制agv叉车前进后退、左右移动或叉齿升降、前倾后仰,所述货盘属具控制系统与货盘属具数据连通,向货盘属具输送控制指令,货盘属具基于接收到的控制指令控制相应部件的工作状态,所述推拉属具控制系统与推拉属具连通,向推拉属具输送控制指令,推拉属具
基于接收到的控制指令控制相应部件的工作状态,所述输送机控制系统与输送机连通,向输送机输送控制指令,输送机基于接收到的控制指令控制相应部件的工作状态,消毒机控制系统与消毒机连接,消毒机控制系统向消毒机发送控制指令控制其对货物进行消毒,总调度平台分别与agv叉车控制系统、货盘属具控制系统、推拉属具控制系统、升降输送机控制系统和消毒机控制系统连接,控制各部件工作顺序。
14.与现有技术相比,本发明具有以下有益效果:研发一款基于agv叉车技术的人工智能掏箱消毒装卸智能装置,填补进口冷冻食品冷冻集装箱装卸货掏箱装箱消毒没有人工智能装备的空白,而将人工智能掏箱消毒设备与agv叉车技术有机地集成为一台人工智能非接触式冷冻集装箱掏箱消毒装卸智能装备,再配套一台码垛拆垛机械,从而实现冷冻食品冷冻集装箱高效装卸货消毒自动化,避免人员接触冷冻食品外包装,从源头上隔绝传染。
附图说明
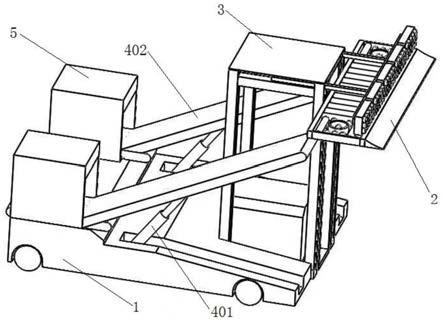
15.图1是实施例1涉及的非接触式集装箱掏箱消毒装卸智能装置总图。
16.图2是实施例1涉及的货盘属具结构图。
17.图3是实施例1涉及的推拉属具结构图。
18.图4是实施例1涉及的升降单元结构示意图。
19.图5是实施例1涉及的输送机部分结构示意图。
20.图6是实施例1涉及的控制平台结构原理示意图。
21.图7是实施例2涉及的非接触式集装箱掏箱消毒装卸智能装置总图。
22.图8是实施例2涉及的货盘属具结构图。
具体实施方式
23.为了更清楚地说明本发明的内容,下面结合附图和具体的实施例对本发明再做进一步的说明:
24.实施例1:
25.本实施例涉及的一种非接触式冷链集装箱掏箱消毒装卸智能装备,如图1 所示,包括agv叉车1、货盘属具2、推拉属具3、输送机4、消毒机5和控制平台6,agv叉车1用于实现与冷冻集装箱的自动对接、步进和叉齿升降及前倾后仰,货盘属具2固定在agv叉车1两个叉齿上,随叉齿的运动而运动,用于卸货或装货时接货理货或摆货理货,推拉属具3固定在agv叉车1前部货盘属具2上部,用于将货物从冷藏集装箱货位掏出放在货盘属具2上进行卸货或将货物从货盘属具2上推入冷藏集装箱货位进行装货,输送机4固定在agv叉车1 两侧,输送机4前端与货盘属具2非接触式对接,后端与消毒机5对接,用于将货物在货盘属具2和消毒机5之间输送,消毒机5固定在agv叉车1的后端用于对货物表面进行全面自动消毒,控制平台6分别与agv叉车1、货盘属具2、推拉属具3、输送机4和消毒机5连接。
26.为了使agv叉车1顺畅进出冷冻集装箱,非接触式冷链集装箱掏箱消毒装卸智能装备整体尺寸应小于冷冻集装箱的内部尺寸(长
×
宽
×
高 11800mm
×
2290mm
×
2540mm),如,本发明装备长
×
宽
×
高为5000mm
×
2200mm
ꢀ×
2450mm。
27.本实施例涉及的agv叉车1是采用了全自由升降技术(如门架高度2450mm 提升高度2100mm),保留了前倾后仰的基本叉车功能,在agv叉车底盘四周侧面或底部固定安装智
能传感器,实时采集其视野范围内的图像或数字或模拟数据,并对其进行处理确定与周边物体之间的距离,确保agv叉车与冷冻集装箱装卸货口精准对接,保持与物体之间的距离实现避障。为防止由于agv叉车车体过宽导致agv叉车行进时货盘属具2和推拉属具3摆头碰撞冷冻集装箱,在 agv叉车两侧车体对称设置四个阻尼轮(图中未画出)。agv叉车在冷冻集装箱中行进时,阻尼轮紧靠冷冻集装箱内壁上,沿冷冻集装箱内壁滚动,以此保持 agv叉车在行进中稳定性。所述agv叉车1为现有技术的具有导航和避障功能的 agv叉车。
28.如图2所示,本实施例涉及的货盘属具2其长度与agv叉车1的宽度相同如2200mm,其宽度可以设置为750mm,货盘属具2是一个装卸货的理货属具。所述货盘属具2前端设置一个长度2200mm宽度200mm刀片状面板201,后端设置一个长度2200mm宽度550mm综合理货平台202,在综合理货平台202两端分别设置一个长度550mm宽度550mm的理货盘203,在综合理货平台202中间(长度1100mm
×
宽550mm)设置了两个长度550mm宽度550mm的横向辊轮传动机构 204.两个横向辊轮传动机构可为互为反向转动,也可以向一个方向转动。
29.具体地,理货盘203包括纵向动力输送辊207、被动万向球205和电动环状转盘206,电动环状转盘206固定在理货盘203中心位置,若干根纵向动力输送辊207等间隔固定在电动环状转盘206前后两端,在纵向动力输送辊207和电动环状转盘206之间以及电动环状转盘206中心均匀布置若干个被动万向球205。
30.进一步地,在理货盘203侧边的框架上固定设置一个推箱器(图中未画出),推箱器包括液压或电动推杆结构和推板,液压或电动推杆固定连接在理货盘203 侧边的框架上,推板固定在液压或电动推杆自由端。装货时液压或电动推杆启动,将货物从理货盘203推向横向辊轮传动机构204,在横向上施加一个外力,便于理货盘203将输送机上纵向运输的货物转运到横向辊轮传动机构204上。
31.进一步地,建议在一个理货盘203靠近输送机位置设置一个翻箱器(图中未画出),用于装货时将从输送机上转运来的货物向货盘属具2外侧翻转90度,适用于货盘属具2上剩余空间不足以直接摆放输送机上转运来货物,但将货物翻转90度后能够摆放的情况。
32.如图3和4所示,本实施例涉及的推拉属具3包括升降架301、升降单元、直线电机307、基板308、真空泵系统(图中未画出)、吸盘310和智能传感器 (图中未画出),升降单元固定在升降架301上,升降单元沿升降架301上下运动,固定在升降单元上的直线电机307与基板308连接,吸盘310和智能传感器均固定在基板308上,吸盘310与真空泵系统连接,所述智能传感器用于采集前方图像数据,获取待掏取货物的位置和高度。所述直线电机307、基板 308、真空泵系统(图中未画出)、吸盘310和智能传感器构成掏手单元,随着升降单元的上下移动掏取不同高度的货物。
33.具体地,如图4示,所述升降单元包括升降架301、升降板302、配重滑道 311、配重滑块303、上下吊钩304、永磁同步曳引机305和曳绳306,升降架 301的四根立柱309均由开口相对的一对槽钢构成,固定在升降板302两端侧面的滑轮分别嵌入左右两侧的槽钢中,沿槽钢内壁滑动,左右两侧的配重滑块303 与固定在升降架301内侧左右两边的配重滑道311滑动连接,带有两个反方向转动曳引轮的永磁同步伺服曳引机305固定在升降架301底部,两条分别绕在永磁同步曳引机两个曳引轮上的曳绳306分别绕过升降架301底部左右两个结构钢中间导向滑轮312连接左右两个升降板302上下吊钩304下端,另外两条曳绳306分别通过升降架301顶部左右两个横梁中间导向滑轮312一头连接配重滑块303一头连接升降板
302上下吊钩304上端。
34.该升降单元工作原理如同升降电梯一样,通过牵引曳绳306实现升降板302 的升降,进而带动掏手单元上下移动,分别固定在左右两升降板302上的直线电机进进出出通过基板308带动吸盘310完成对不同高度货物的取放。
35.具体地,升降架301的四根立柱均有开口相对的一对槽钢组成,槽钢下端固定在agv叉车1的底盘上,上端四周用结构钢固定,升降架301的外观尺寸如长1200mm宽1100mm高2450mm(内部尺寸长1160mm宽960mm高2450mm),槽钢的宽度如70mm槽深10mm,四对槽钢口口相对形成四个空隙(宽度如50mm) 立柱,在前后两个空隙立柱空隙间设置一条长1200mm宽50mm厚度20mm的升降板302。
36.如图4所示,本实施例涉及的输送机4它是连接货盘属具2与消毒机5的货物通道,其前端随机升降与货盘属具2保持非接触式对接,其后端与消毒机5 的传动机构对接,输送机4后端的宽度大于消毒机5传动机构的宽度且输送机4 处于水平状态时其输送带表面与消毒机5传动机构输送带表面同在一个水平面上。输送机4包括液压升降装置401、输送机主体402、插销滚轮403和限位滑槽404,在agv叉车1底盘靠近消毒机5前端处固定设置两限位滑槽404,对应地,输送机主体402后端两侧均固定一插销滚轮403,插销滚轮403嵌入限位滑槽404内与其滑动连接,输送机主体402中部通过液压升降装置401固定在agv 叉车1底盘侧边中间位置,输送机主体402前端与货盘属具2非接触式对接。在液压升降装置401带动下,输送机主体402后端沿限位滑槽404移动,输送机主体402前端升起过程中,输送机主体402前端置于货盘属具2下端或靠近货盘属具2,两者之间的间隙不足以使货物掉落。
37.本实施例涉及的消毒机5为现有的隧道式半导体深紫外消毒机或化学消毒剂喷淋消毒机,如专利cn2020225466938所述的一种流水作业用物体表面全面杀菌消毒装置,消毒机5固定在agv叉车1车体后端底盘上,消毒机5底部的传动机构后端与agv叉车1车体后端对齐,消毒机5传动机构前端与输送机主体402对接。
38.如图5所示,具体地,控制平台6包括agv叉车控制系统601、货盘属具控制系统602、推拉属具控制系统603、输送机控制系统604、消毒机控制系统605 和总调度平台606,agv叉车控制系统601与agv叉车1连接,agv叉车控制系统601用于agv叉车1的调度,发送控制指令给agv叉车1,agv叉车1基于接收到的控制指令控制agv叉车1前进后退、左右移动或叉齿升降、前倾后仰,所述货盘属具控制系统602与货盘属具2数据连通,向货盘属具2输送控制指令,货盘属具2基于接收到的控制指令控制相应部件的工作状态,所述推拉属具控制系统603与推拉属具3连通,向推拉属具3输送控制指令,推拉属具3 基于接收到的控制指令控制相应部件的工作状态,所述升降输送机控制系统604 与输送机4连通,向输送机4输送控制指令,输送机4基于接收到的控制指令控制相应部件的工作状态,消毒机控制系统605与消毒机5连接,消毒机控制系统605向消毒机5发送控制指令控制其对货物进行消毒,总调度平台606分别与agv叉车控制系统601、货盘属具控制系统602、推拉属具控制系统603、升降输送机控制系统604和消毒机控制系统605连接,控制各部件工作顺序,实现有条不紊的工作。控制平台可以设置在冷库的智能控制间,也可以工作人员跟在装置后手持平板电脑监控和操作,实现非接触控制,避免人员接触货物。
39.具体地,所述智能传感器包含但不限于三维视觉传感器、二维视觉传感器、激光传感器、光电传感器、超声波传感器、磁条识别器、二维码识别器等。
40.进一步地,所述一种非接触式冷链集装箱掏箱消毒装卸智能装备,还包括码垛拆垛机和伸缩式输送机,伸缩式输送机一端固定在码垛拆垛机工位,另一端与消毒机5内的传动机构连接。具体地,码垛拆垛机为布设龙门式或机械手式码垛拆垛机。
41.本实施例涉及的一种非接触式冷链集装箱掏箱消毒装卸智能装备卸货过程为:
42.(1)agv叉车控制系统601,总调度平台606接收到agv叉车控制系统601 确认与冷冻集装箱对接完成反馈信号后,向货盘属具控制系统602、推拉属具控制系统603、升降输送机控制系统604、消毒机控制系统605发送控制指令,货盘属具控制系统602、推拉属具控制系统603、输送机控制系统604、消毒机控制系统605启动;
43.(2)通过推拉属具3基板308上的智能传感器确定待掏货物面的高度和位置,在升降单元的带动下,掏手单元提升对准待掏货物面最高货物层,同时在叉齿的带动下货盘属具2上升至待掏货物面最高层货物最低点,停留在推拉属具3基板308下侧,所述货物层是根据吸盘一次能够抓取一层货物并能掏出货物到货盘属具2上定义;
44.(3)在直线电机307的带动下推出基板308和吸盘310对准待掏货物层,真空泵系统启动,吸盘310吸住货物,直线电机307带动吸盘310回位,待掏货物层落在货盘属具2上,真空泵系统关闭,货物脱离吸盘310;
45.(4)在叉齿的带动下货盘属具2下降一个货面并对准待掏取货物层最低点,液压装置401带动输送机主体402移动与货盘属具2对接,货盘属具呈仰角状 (如7度);
46.(5)两个横向辊轮传动机构204分别向左右转动,货物从中部分别向两侧的理货盘203移动,纵向动力输送辊207转动,进而将货物从理货盘203输送到输送机4;为避免大件货物过长(如大于550mm)卡在理货盘203处,货物从横向辊轮传动机构204由理货盘203转运到输送机4时,电动环状转盘206升起(如5mm)由内向外旋转90度再落下,使货物转向竖向进入输送机4;
47.(6)输送机4将货物转接到消毒机5内的传动机构上,由传动机构输入到消毒机5内,在消毒机5内进行消毒;
48.(7)消毒机5传动机构后端外接伸缩式输送机,货物消毒完成转接到伸缩式输送机,由伸缩式输送机将货物输送到码垛拆垛机工位进行按照规则码垛,一个标准垛完成后,叉车将码好垛的货物运到冷库;伸缩式输送机一端固定在码垛拆垛机工位,另一端与消毒机5内的传动机构连接,随着agv叉车1的行进伸长或回缩;
49.(8)在掏取完成一层货物后,在升降单元的带动下,掏手单元降落对准第二个待掏货物层,重复步骤(2)
‑
(7),至待掏取货物面只有一个货物层,在叉齿的带动下货盘属具2呈倾角状下降至集装箱地板,推拉属具3对准待掏货物面抓住整排货物将货物拉入至货盘属具2上,推拉属具3上升一个货物面,货盘属具2呈仰角状上升至与输送机4对接位置,重复步骤(5)
‑
(7),完成一个货物面的掏取;
50.(9)agv叉车1前进一个货位面,重复步骤(2)
‑
(8),直至整个集装箱的货物卸完为止。
51.在实际工作中,货物摆放是极不规范的,特别是有的货物长度超过550mm,且横向摆放在集装箱中,当货物被拉到货盘属具2上也是横向,此时理货盘203 上的电动环状转盘升起(如5mm)由内向外旋转90度使横向的货物转为竖向再落下,货物被理货盘203的辊轮输送到输送机4上。
52.在防疫期间中国海关查验进口冷链货物的流程是集装箱卡车在海关查验月台口对口停准先卸货,卸货过程如上所述,海关查验完货物后,紧接着需要将货物再装入到冷冻集装箱中,而且根据防疫要求装货也需要再次消毒。下面具体说明本实施例涉及的非接触式冷冻集装箱掏箱消毒装卸智能装备的装货过程。
53.集装箱装货过程恰恰与卸货过程相反,传动机构和输送机等电机系统相对于卸货过程实施反向运转,与卸货相比,准备装集装箱的货物的外包装的尺寸是已知的,所以根据集装箱的内部尺寸和货物外包装尺寸,在装箱前应该计算好装箱排列方法,除外包装厚度过薄(如9mm)的货物和经计算需要立起摆放的货物外,建议货物一律竖向平摆货物,这样可以提高装货效率,同时建议输送机始终处于水平状态,货盘属具呈倾角状与输送机对接,货物摆放的堆高任务由货盘属具和推拉属具完成。
54.本实施例涉及的非接触式冷冻集装箱掏箱消毒装卸智能装备的装货过程,具体包括以下步骤:
55.(1)将伸缩式输送机前端已经与agv叉车1末端的消毒机5传动机构对接,伸缩式输送机后端与码垛拆垛机对接,agv叉车控制系统601控制agv叉车1与冷藏集装箱对接;
56.(2)总调度平台606接收到agv叉车控制系统601确认与冷冻集装箱对接完成反馈信号后,向货盘属具控制系统602、推拉属具控制系统603、输送机控制系统604、消毒机控制系统605发送控制指令,货盘属具控制系统602、推拉属具控制系统603、输送机控制系统604、消毒机控制系统605启动;
57.(3)agv叉车1驶入集装箱内部,在推拉属具3基板308上的智能传感器确定货盘属具2前端距离集装箱内前壁一个货物长度+操作距离(如20mm)停车,输送机控制系统604控制输送机主体402在水平位置,在叉齿的带动下,货盘属具2与输送机主体402对接,推拉属具控制系统603控制推拉属具3在货盘属具2上方至少一个货物面;
58.(4)码垛拆垛机开始将查验完毕的货物从码垛盘上一件一件抓起竖向摆放在伸缩式输送机上,货物经消毒机5消毒后由输送机4输送到货盘属具2的理货盘203上;
59.(5)货物被理货盘203纵向辊轮输送到货盘属具2前端,由货盘属具2两端理货盘203上的推箱器将货物平推至正在由外向内转动的横向辊轮传动机构 204上,货物由两端外侧向中间依次排开直至摆满货盘属具2;
60.(6)货盘属具2下降至集装箱箱底,推拉属具3从高于输送机4一个货面的高度下降到货盘属具2的推拉货位置,推拉属具3推出基板308将整排货物从货盘属具2上推入集装箱内,此时推拉属具3收回基板308并上升至高于输送机4一个货面的位置停下,货盘属具2升至输送机4一个水平位置停下,
‑‑‑‑‑‑ꢀ
在智能传感器的指挥下循环往复,货盘属具2和推拉属具3上上下下进进出出完成一个货面的装箱任务,此时agv叉车1后退一个作业距离后重复上述作业直至完成装箱任务。
61.常见情景是,当货物基本摆满货盘属具2时,货盘属具2的边缘还剩余一定空间,且不足以再按常规摆法摆放货物,但是当把货物翻转90度能够轻松立起摆放时,货盘属具2上的两横向传动机构204向一侧移动,如由右向左转动使货物向左侧集中,设置在货盘属具2右侧的理货盘203后端的翻箱器强行将由输送机4输送至货盘属具2右侧理货盘203的货物翻转90度,货物被理货盘 203纵向辊轮输送到货盘属具2前端,推拉属具3基板308将货盘属具2上整排的货物推入到集装箱中,循环至装完货物为止。
62.还有一种情况,当货物竖向摆放已经基本装满集装箱时,再竖向摆放已经摆不下来,但是货物横向摆放或立起摆放仍有空间时,货物竖向进入货盘属具2 理货盘203,(货物需要立起摆放时,翻箱器强行将货物翻转90度)货物被理货盘203电动环状转盘升起(5mm)由外向内旋转90度落下,然后被理货盘203 纵向辊轮输送到货盘属具2前端,由货盘属具2两端的推箱器203将货物平推至正在由外向内转动的横向辊轮传动机构204上货物由两端外侧向中间依次排开直至摆满货盘属具2,推拉属具3基板308将货盘属具2上整排的货物推入到集装箱中,循环至装完货物为止。
63.上述卸货和装货过程是一种优选方式,并不是对本申请实施过程的限制。本实施例所述的一种非接触式冷链集装箱掏箱消毒装卸智能装备也可以采用其他方法完成卸货或装货,如,在装卸货时,输送机始终处于水平状态,货物堆高任务由货盘属具和推拉属具升降完成。
64.实施例2
65.实施例1在agv叉车1底盘左右两侧均固定了一个消毒机5,对应地,左右两侧各设置一个输送机,在货盘属具2左右两侧设置2个理货盘,且横向传动机构204也是两个,虽然提高了工作效率,但是装置结构复杂度加大,成本升高。为了平衡成本和工作效率,本实施例对实施例1进一步改造。
66.本实施例涉及的一种非接触式冷链集装箱掏箱消毒装卸智能装备,如图7和8 所示,只有右侧一台消毒机5,对应地,只有右侧一台输送机4,在靠近输送机 4的货盘属具2右侧设置理货盘203,货盘属具2左侧到右侧理货盘203间是一个完整的横向辊轮传动机构204,卸货时货物通过货盘属具2横向辊轮传动机构204和理货盘203同时运转,货物依次通过理货盘203向输送机4输送,由输送机4输送到消毒机5对货物消毒,消毒后的货物被伸缩式输送机输送到码垛拆垛机区域,码垛拆垛机码好垛再由叉车运走,卸货中的其他情景与实施例1相同。装货时码垛拆垛机将货物从码货盘上一件一件取出并将货物竖向摆放在伸缩式输送机上输送到消毒机5对货物消毒后通过输送机4输送到货盘属具2上的理货盘203,由理货盘203上的推箱器将货物推入横向辊轮传动机构204,由横向辊轮传动机构204将货物输送到货盘属具2左侧,当货物摆满货盘属具2 时推拉属具3基板308将货盘属具2上的货物整排推入集装箱中,装货中的其他情景与实施例1相同。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1