一种四脚滑动升降辊道的制作方法
1.本发明涉及工业自动化设备制造领域,特别是涉及一种四脚滑动升降辊道。
背景技术:
2.由于现有顶升机构精度低、定位差、推力大、升降不平稳无法满足产品生产要求,且实施的空间局促无法完成常规垂直升降,故此开发出四脚滑动升降机构,此机构比原有机构更耐用,精度高,定位准,升降平稳,推力小,成本低,完全满足实际需要。
技术实现要素:
3.本发明主要解决的技术问题是提供一种四脚滑动升降辊道,以解决背景技术中存在的问题。
4.为解决上述技术问题,本发明采用的一个技术方案是:提供一种四脚滑动升降辊道,包括:基板、动力源、连杆、滚轮机构以及垂直滑动机构,所述两根连杆左右对称分别滑动设置在基板上,所述动力源通过推板与基板左右两端的连杆相连接,所述每根连杆的前后两端均设置有滚轮机构,左右两端的所述滚轮机构之间通过连接杆相连接,所述连接杆的左右两端分别设置有辊道板,所述辊道板上分布有若干个垂直滑动机构。
5.在本发明一个较佳实施例中,所述动力源为气缸,所述气缸的输出端与推板相连接。
6.在本发明一个较佳实施例中,所述滚轮机构包括滑动介质以及与滑动介质相连接的连接块,所述左右两端的连接块之间通过连接杆相连接。
7.在本发明一个较佳实施例中,所述滑动介质为深沟球轴承。
8.在本发明一个较佳实施例中,所述每个滑动介质下端设置有底垫,所述底垫固定设置在基板上。
9.在本发明一个较佳实施例中,所述垂直滑动机构包括直线轴承、轴以及轴安装座,所述直线轴承与辊道板相固定连接,所述轴安装在轴安装座上,所述轴安装座固定设置在基板上,所述直线轴承套设在轴上。
10.在本发明一个较佳实施例中,所述辊道板上分布有若干个滚轮。
11.在本发明一个较佳实施例中,所述基板上分布有若干个托盘定位球。
12.本发明的有益效果是:本发明指出的一种四脚滑动升降辊道,具有以下优点:1、在不增加成本,不新购升降辅助设备的前提下生产产品,满足客户需求;2、在现有设备无法满足生产的状态下,通过此四脚滑动升降机构实现产品生产;3、通过动力源伸缩实现此升降机构的推动
‑‑‑
连杆联动
‑‑‑‑
滚轮机构滑动
‑‑‑
垂直滑动
‑‑‑
定位限位的原理,循环操作来实现产品的上下升降;4、由于四脚滑动式升降,顶升后平面度较高,可以最大限度提升工件的平稳度,生产安全最大化。
附图说明
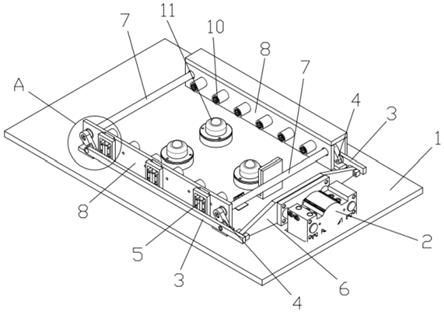
13.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,其中:图1是本发明一种四脚滑动升降辊道一较佳实施例的结构示意图;图2是图1中a部分的放大图。
具体实施方式
14.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
15.请参阅图1
‑
2,本发明实施例包括:一种四脚滑动升降辊道,包括:基板1、动力源2、连杆3、滚轮机构4以及垂直滑动机构5,所述两根连杆3左右对称分别滑动设置在基板1上,所述动力源2通过推板6与基板1左右两端的连杆3相连接,所述每根连杆3的前后两端均设置有滚轮机构4,左右两端的所述滚轮机构4之间通过连接杆7相连接,所述连接杆7的左右两端分别设置有辊道板8,所述辊道板8上分布有若干个垂直滑动机构5。
16.所述动力源2为气缸,所述气缸的输出端与推板6相连接。
17.所述滚轮机构4包括滑动介质41以及与滑动介质41相连接的连接块42,所述左右两端的连接块42之间通过连接杆7相连接,所述滑动介质41为深沟球轴承,所述每个滑动介质41下端设置有底垫9,所述底垫9固定设置在基板1上。
18.所述垂直滑动机构5包括直线轴承51、轴52以及轴安装座53,所述直线轴承51与辊道板8相固定连接,所述轴52安装在轴安装座53上,所述轴安装座53固定设置在基板1上,所述直线轴承51套设在轴52上。
19.所述辊道板8上分布有若干个滚轮10,所述基板1上分布有若干个托盘定位球11,托盘通过滚轮10输送到位后下降,降到托盘定位球11上。
20.工作原理:具体实施时,动力源2通过推板6推拉连杆3时带动滚轮机构4运动,从而带动辊道板8上下运动,直滑动机构5随动,保证升降的垂直度,升降高度由滚轮机构4长度决定,所以每次升降高度及精度得到了保证。
21.综上所述,本发明指出的一种四脚滑动升降辊道,具有以下优点:1、在不增加成本,不新购升降辅助设备的前提下生产产品,满足客户需求;2、在现有设备无法满足生产的状态下,通过此四脚滑动升降机构实现产品生产;3、通过动力源伸缩实现此升降机构的推动
‑‑‑
连杆联动
‑‑‑‑
滚轮机构滑动
‑‑‑
垂直滑动
‑‑‑
定位限位的原理,循环操作来实现产品的上下升降;4、由于四脚滑动式升降,顶升后平面度较高,可以最大限度提升工件的平稳度,生产安全最大化。
22.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发
明说明书内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1